




 文章详细介绍了自动驾驶小车的开发,包括结构设计、控制模块、ESP32控制器的使用、通信协议、循迹推理任务和ROS2在激光雷达建图中的应用。讲解了如何通过传感器获取环境信息,利用模型进行决策,并采用PID等算法进行精确控制。
文章详细介绍了自动驾驶小车的开发,包括结构设计、控制模块、ESP32控制器的使用、通信协议、循迹推理任务和ROS2在激光雷达建图中的应用。讲解了如何通过传感器获取环境信息,利用模型进行决策,并采用PID等算法进行精确控制。
【2023 · CANN训练营第一季】智能小车课堂笔记
一、开发自动驾驶小车需要的模块
1.稳固的结构模块
2.运动控制模块
3.超声波传感器模块
4.摄像头视觉模块
5.其他传感器模块
二、小车的整体控制思路图
这里老师附上了一个对整个小车的设计思路图,以下未画线的为原图:
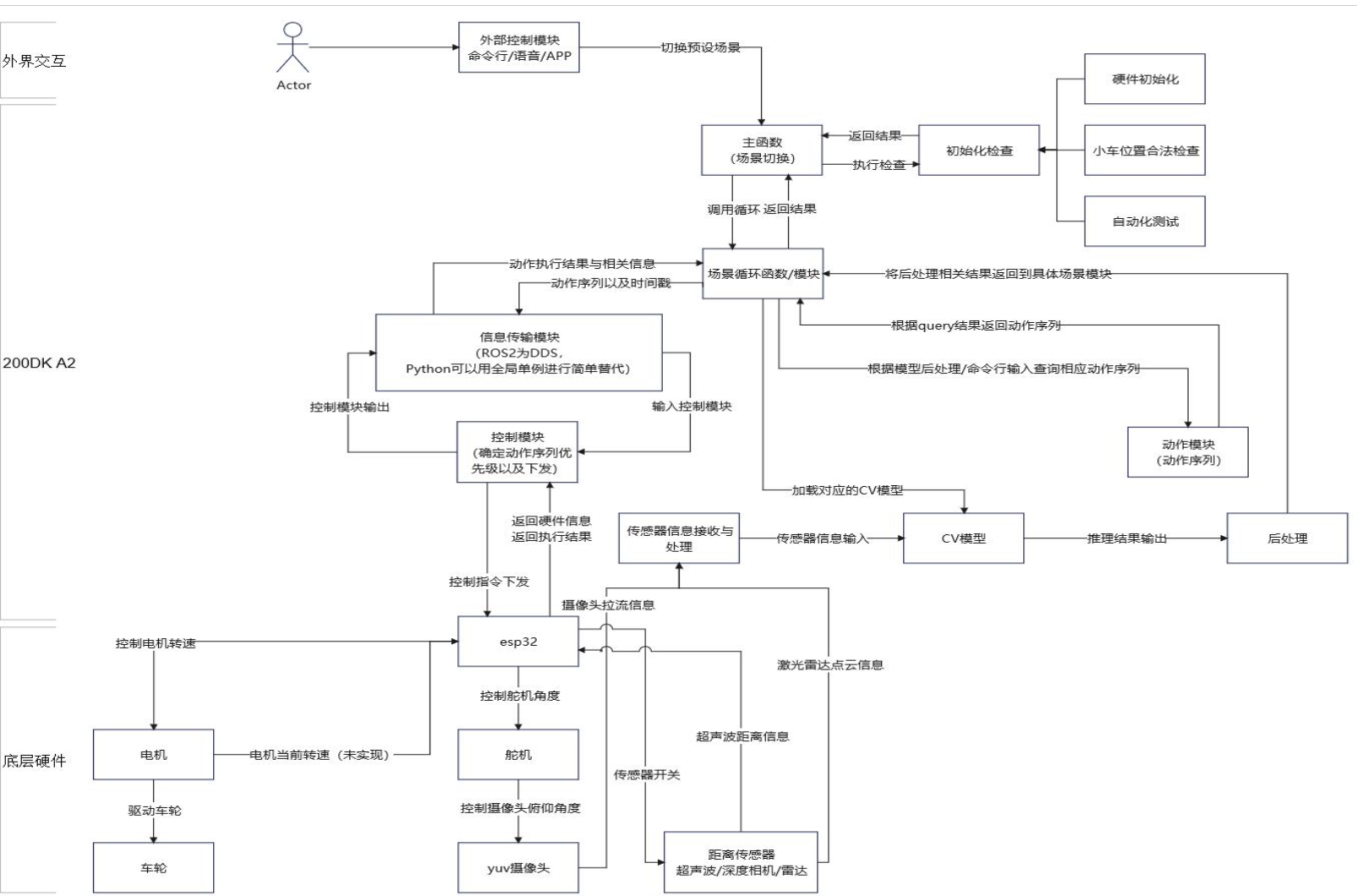
我将老师几个设计点的思路图简单画线标注了一下:
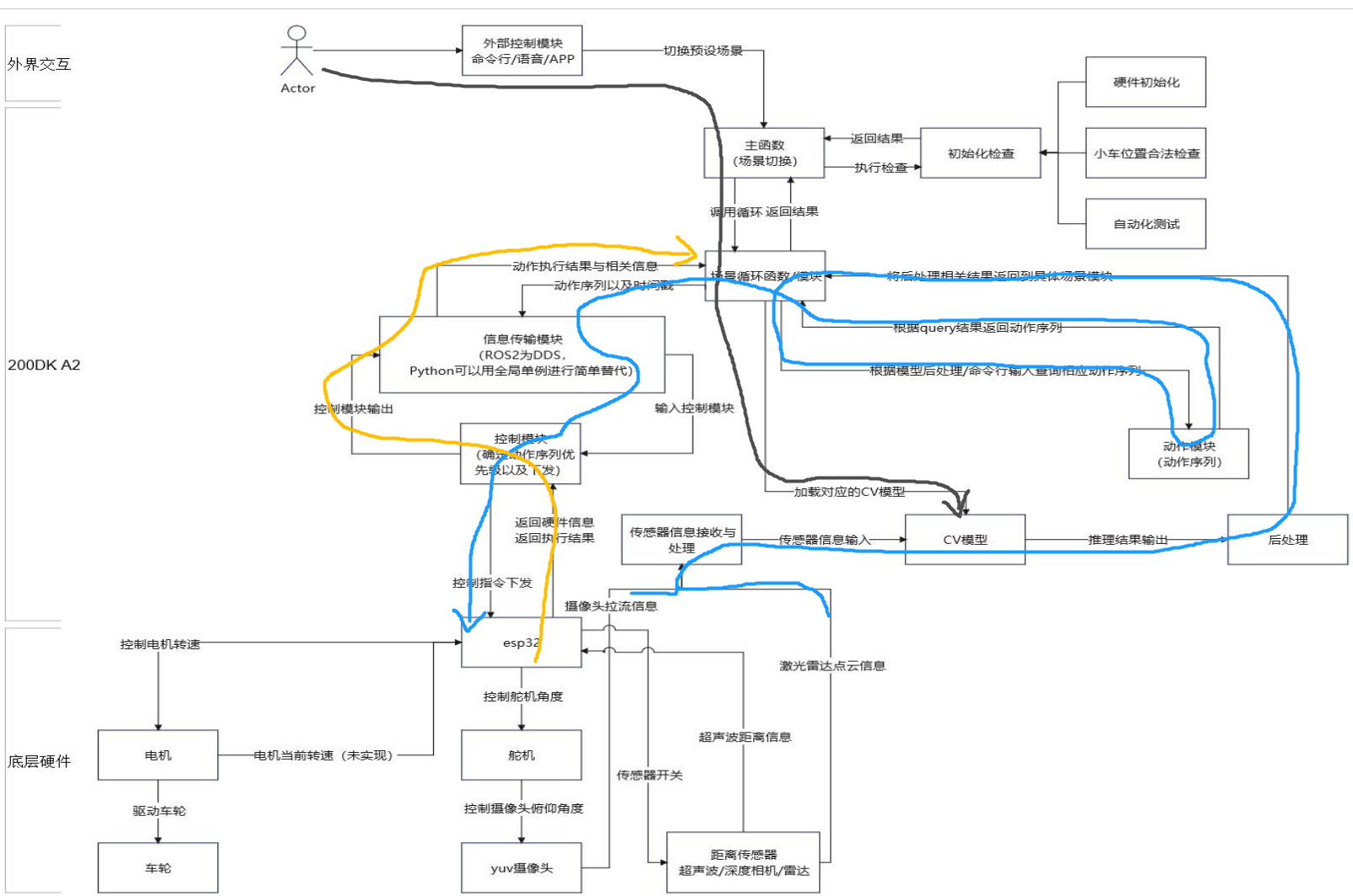
我们可以看到,三种颜色其实可以简略的代表了我们需要完成的几个功能:
1.灰色:
相关的初始化操作,硬件初始化、自动化测试、位置合法检查、模型加载等一系列前置检查工作,确保小车后续可以正常运行
2.蓝色:
小车需要得知的前方环境信息均来自各种摄像头、传感器,采集了相关数据后,送入加载好的模型进行推理,并后处理结果为具体场景下的一些信息,反馈回主控部分函数,分析模型推理结果提供的动作序列,并下发给相关控制模块,下发给小车运动的控制模块主控芯片ESP32,并尤其进行实际的动作指令下发,如电机控制、舵机控制
3.黄色:
控制完成后,ESP32需上报其动作执行的情况,到主控函数进行分析。
其实老师这里也提到用编码电机等方式,其实就说明如果进行精密控制,也可以在主控中加入一些PID算法,辅助进行小车的姿态控制
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2317
2317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











