







目录
前言:现在在学这些算法的时候感觉也不是那么难,相反感觉还有一丝容易。曾记否,大一暑假,在集训队学算法,被虐的那叫一个体无完肤,害,也不知道为啥,可能吧,正是可能被虐开窍了,现在觉得这些东西挺容易的,当然我只说从理解的层面上说,真的要我自己写可能还真的写不出来。
现在学算法,我觉得先要知道这个算法的思想,要知道这个算法到底在干嘛,它在怎么做,它的过程是什么,然后刷题,看别人的程序代码时,把算法的思想结合进去看程序,有时候,你自己看着看着,你就知道别人下一步程序要干什么。当时年少无知,大一暑假的时候,头可能比较铁,当时学算法时,算法的思想没怎么理解,上来就开干题目,一言不合就搜代码,强行理解被人代码的过程在干嘛,当然过程痛苦的,唉,当初怎么就那么憨憨嘞,哈哈哈哈。
这篇总结一下做题时自己对这几个算法的一些心得吗,当然是指算法的思想。
建议了解思想后,找一些基础题刷一刷
Kruskal(克鲁斯卡尔)算法
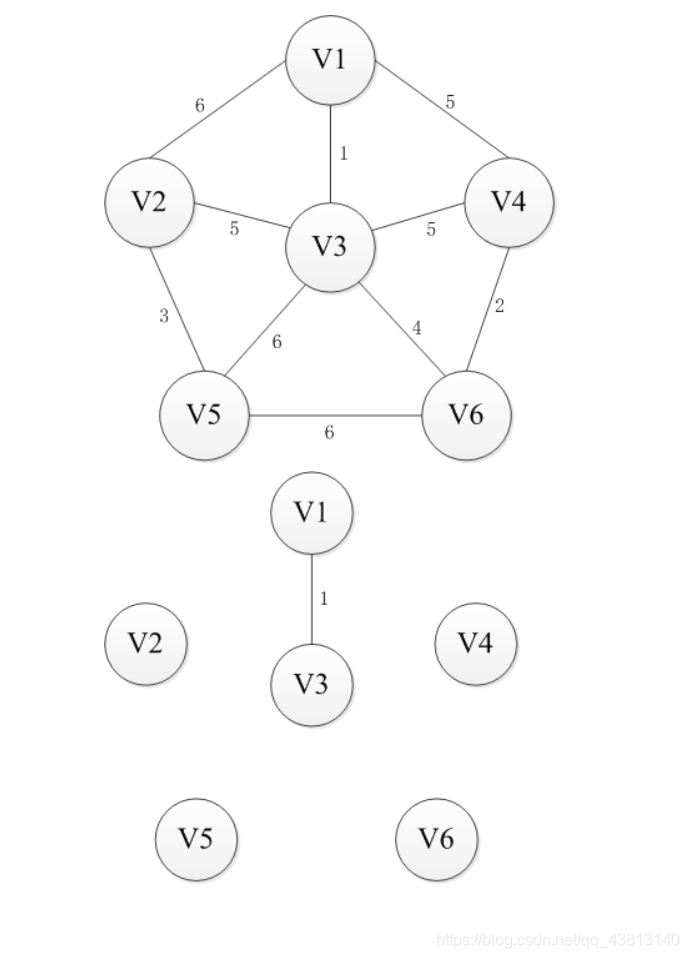
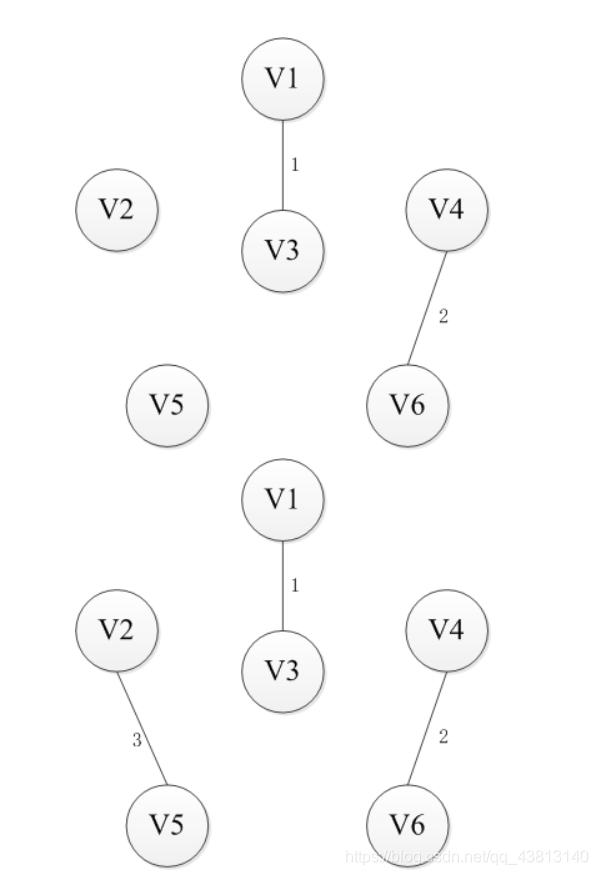
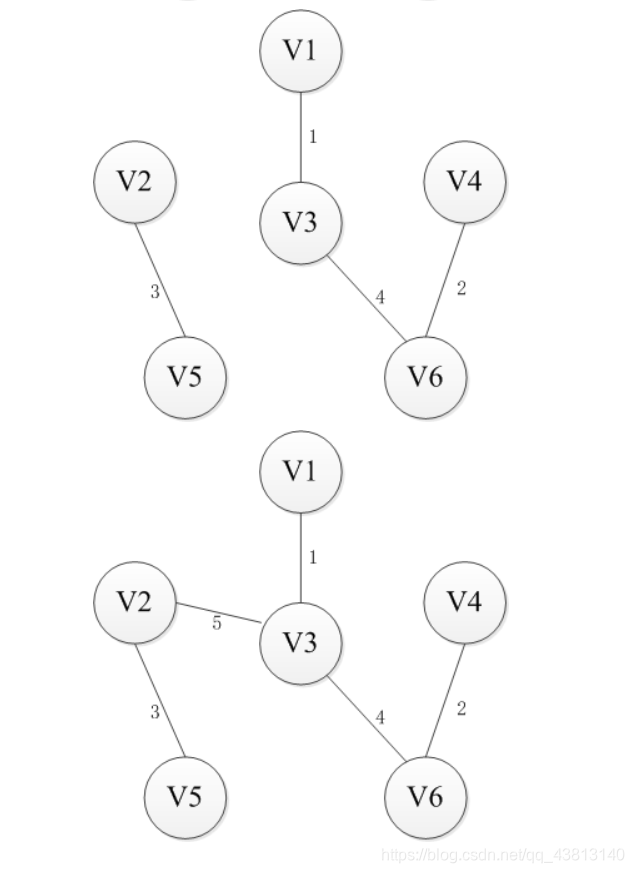
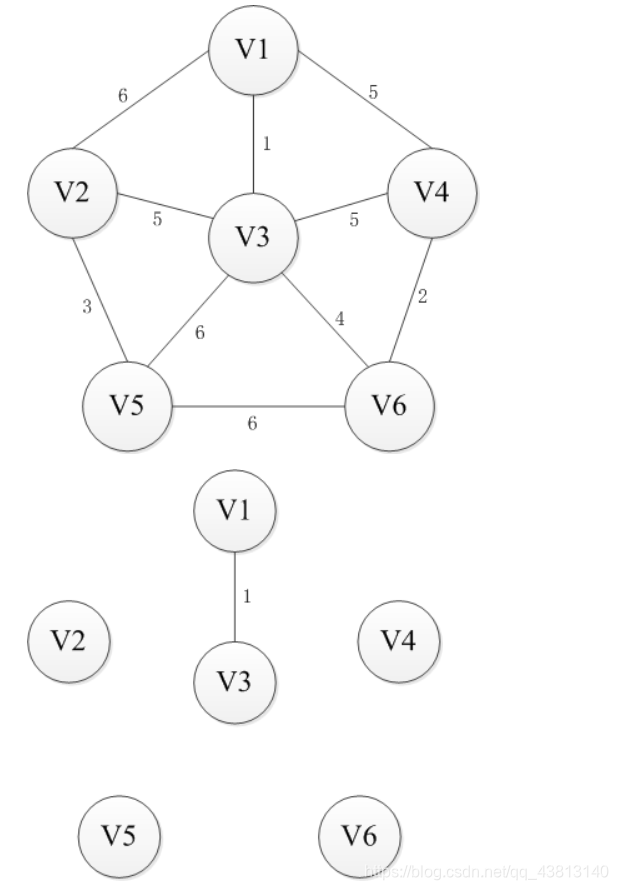
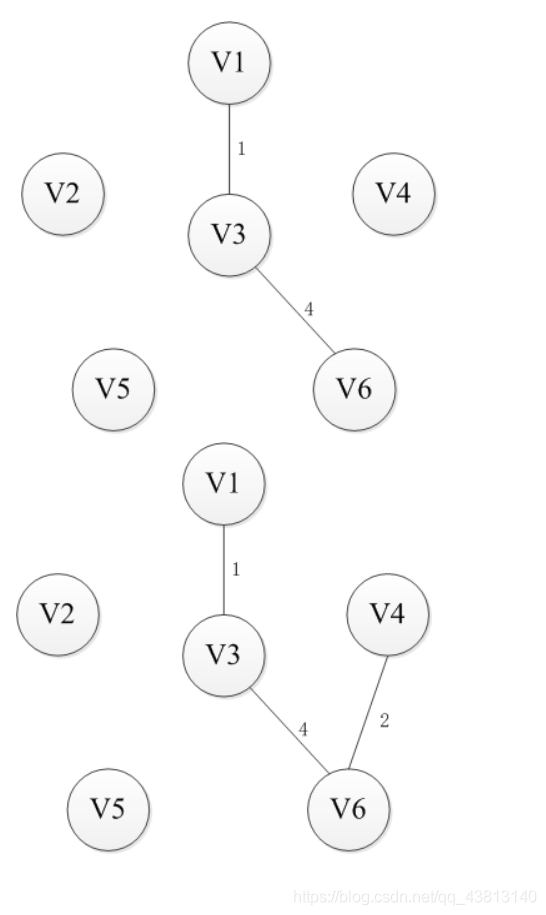
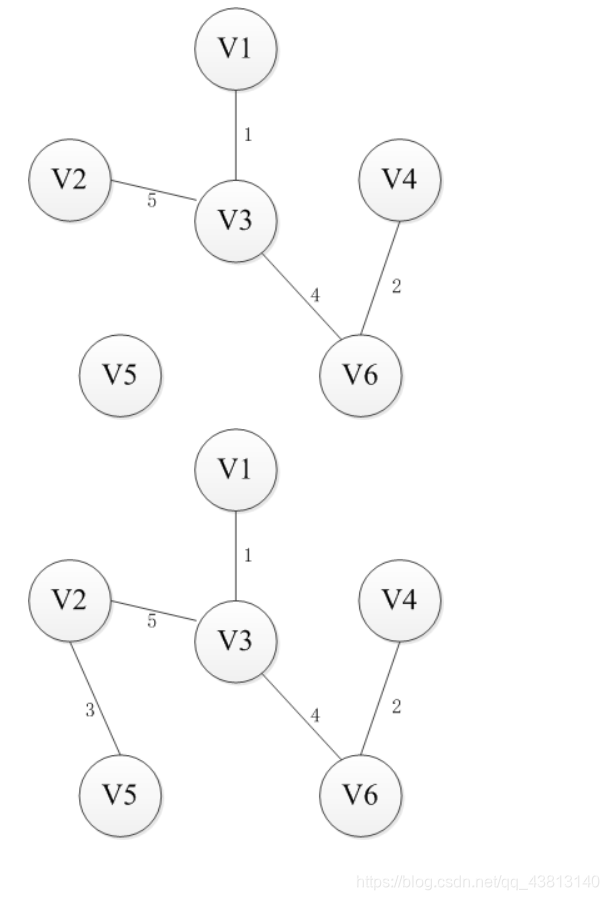
最小生成树,算法思想:首先按照边的权值进行从小到大开始排序,每次从剩余的边中选择权值较小的且边的两个顶点不在同一个集合内的边,加入到生成树,直到n-1条边为止。(并查集,并且在查找集合中涉及路径压缩)图解如下
![]()
![]()
![]()
prime(普利姆)算法
最小生成树
将顶点分为两类,树顶点(已被选入生成树的顶点),非树顶点(还未被选入生成树的顶点),首先选择任意一个顶点加入生成树,接下来要找出一条边添加到生成树,这需要枚举每一个树顶点到每一个非树顶点的所有边,然后找到最短边加入到生成树,照此方法,重复操作n-1次,直到将所有顶点加入到生成树中
![]()
![]()
![]()
Floyd(弗洛伊德)算法
解决的是多源最短路径的问题,就是任意两点通过中转点找到最短路径
核心代码:
for(k=1;k<=n;k++)
for(i=1;i<=n;i++)
for(j=1;j<=n;j++)
if(e[i][j]>e[i][k]+e[k][j])
e[i][j] = e[i][k]+e[k][i];这个还是得看过程理解,i号顶点到j号顶点只经过前k号作为中转点,类似于动态规划的思想
Dijkstra(迪杰斯特拉)算法
单源最短路
思想:每次找到离源点最近的一个顶点,然后以该顶点为中心进行扩展,最终得到源点到其余所有点的最短距离
//点1到各个点的距离
for(i=1;i<=n;i++)
dis[i] = e[1][i];
for(i=1;i<=n-1;i++)
{
min = inf;//min设为无限大
for(j=1;j<=n;j++)
{
if(book[j]==0&&dis[j]<min)//找到没访问的点,同时能够到达的点
{
min = dis[j];//记录最小值
u=j;//把最小的这个储存到u中
}
}
book[u]=1;//标记u已经访问过了
for(v = 1;v<=n;v++)
{
if(e[u][v]<inf)//找与这个点相连接的点
{
if(dis[v]>dis[u]+e[u][v])//如果经过u到达v点的距离比之前的距离要短
dis[v] = dis[u]+e[u][v];//更新dis
}
}
}














 2500
2500











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









