






7 滤波器
7.1 卷积


浮雕化:

图像锐化:

图像轮廓提取:

7.2 方盒滤波和均值滤波
相较于上面的操作,opencv提供了一个函数,来生成卷积核
均值滤波 cv2.blur(img,(5,5))
方盒滤波 cv2.boxFilter(img,-1,(5,5),normalize=True)
7.3 高斯滤波
卷积核的分布符合高斯分布即为高斯滤波
通过高斯滤波,可以使图像变的平滑,同时有削弱噪声的功能
cv2.GaussianBlur(img,(5,5),sigmaX=3): 这个函数,会用即可
import cv2
import numpy as np
img = cv2.imread('./dog.jpg')
new_image = cv2.GaussianBlur(img,(5,5),sigmaX=3)
cv2.imshow('img',np.hstack((img,new_image)))
cv2.waitKey(0)
cv2.destroyAllWindows()
7.4中值滤波
对椒盐噪声具有非常好的处理效果cv2.medianBlur(img,5)
7.5 双边滤波
cv2.bilateralFilter(img,d=7,sigmaColor=20,sifmaSpace=50)
src:输入图像
d:过滤时周围每个像素领域的直径
sigmaColor:在color space中过滤sigma。参数越大,临近像素将会在越远的地方mix。
sigmaSpace:在coordinate space中过滤sigma。参数越大,那些颜色足够相近的的颜色的影响越大。
在邻域滤波的时候不仅仅考虑集合距离,而且考虑灰度的相似性
能够在使图像变平滑的时候,保留边缘的信息
有美颜磨皮的效果
7.6 二值化

二值化的阈值 threshold(src,thresh,maxval,type[,dst])

7.7 马赛克的设置
图片马赛克的几种设置方式
方式一
cv2.resize 单纯将图片进行放大
import cv2
import numpy as np
if __name__ == '__main__':
img = cv2.imread('cat.jpg')
print(img.shape) #高400,宽400
img2 = cv2.resize(img,(40,40))
img2 = cv2.resize(img2,(400,400))
cv2.imshow('cat',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()

可以看出,reszie的方式与马赛克还是有一些区别的,其主要的作用是将图片变模糊
方式二
对图片的某像素点进行,行和列的重复
利用 np.repeat 对像素点进行重复
import cv2
import numpy as np
if __name__ == '__main__':
img = cv2.imread('cat.jpg')
img2 = cv2.resize(img,(40,40))
img3 = np.repeat(img2,10,axis=0)
img3 = np.repeat(img3,10,axis=1)
cv2.imshow('cst',img3)
cv2.waitKey(0)
cv2.destroyAllWindows()

方式三,每十个取一个像素,还在原大小图片进行放置
7.8 指定区域的马赛克
用切片的方式,将图片的指定区域获取,处理成马赛克,在放置回去
8算子
第7章所将的各种滤波,主要的目的为对图片进行处理,如:降噪,锐化,将图像变得平滑等
本章将会提到几种常见的算子,这些算子的主要作用为,提取图像的特征,如:提取边界
8.1 索贝尔(sobel)算子
sobel是一种非常基础的图像边缘检测的算法,它是求图像的相邻像素点的一阶差分
在OpenCv中,可以分别求出X、Y轴的一阶差分值,并将两张图片叠加,即可得到图像的边缘轮廓
import cv2
import numpy as np
img = cv2.imread('./shudu1.jpg')
dx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
dy = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
dst = cv2.add(dx//2,dy//2)
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.imshow('img1',np.hstack((img,dst)))
cv2.waitKey(0)
cv2.destroyAllWindows()
下图可以看出来,识别的图像效果不太理想,这是因为sobel算子所处理的图像,容易出现,图像的边缘较粗,且可能出现伪边缘的情况。

8.2 沙尔(scharr)算子
scharr算子与sobel算子几乎相同,只不过Keneral的值发生了变化
cv2.Scharr(img,cv2.CV_64F,0,1)

8.3 拉普拉斯算子(一种求边缘的二阶导数的算子)
效果很好
import cv2
import numpy as np
img = cv2.imread('./shudu1.jpg')
dst = cv2.Laplacian(img,-1,ksize=3)
cv2.imshow('img1',np.hstack((img,dst)))
cv2.waitKey(0)
cv2.destroyAllWindows()

9 人脸的检测
9.1 单张图片人脸检测
这里新用到了cv2中的级联分类器
cv2.CascadeClassifier(‘haarcascade_frontalface_alt.xml’)
可以检测图片的特征值
函数 faceCascade.detectMultiScale(gray,1.1,2,30)
#第一个参数image:是灰度图像
#第二个参数scaleFactor:是尺度变换,就是向上或者向下每次是原来的多少倍,这里是1.02倍
#第三个参数minNeighbors:是人脸检测次数,设置越高,误检率越低,但是对于迷糊图片,我们设置越高,越不易检测出来,要适当降低
#第四个参数flags:
CASCADE_DO_CANNY_PRUNING=1, 利用canny边缘检测来排除一些边缘很少或者很多的图像区域
CASCADE_SCALE_IMAGE=2, 正常比例检测 CASCADE_FIND_BIGGEST_OBJECT=4, 只检测最大的物体
CASCADE_DO_ROUGH_SEARCH=8 初略的检测
#最后两个参数用来限制得到的目标区域的范围
hon
import cv2
import numpy as np
if __name__=='__main__':
img=cv2.imread('lina.png')
face_detector=cv2.CascadeClassifier('haarcascade_frontalface_alt.xml')
faces = face_detector.detectMultiScale(img, 1.1, 3, 0)
print(faces)
for x,y,w,h in faces:
cv2.rectangle(img,pt1=(x,y),pt2=(x+w,y+h),color=[0,0,255],thickness=2)
cv2.imshow('face1',img)
cv2.waitKey(0)
cv2.destroyAllWindows()

9.2 同时检测多个人脸
增加一个小技巧,检测黑白,显示彩色。
对彩色图片预处理为黑白颜色后,人脸检测效果更明显,同时减小计算量。
import cv2
import numpy as np
if __name__=='__main__':
img=cv2.imread('NBA.jpg')
gray= cv2.cvtColor(img,code=cv2.COLOR_BGRA2GRAY)
face_detector=cv2.CascadeClassifier('haarcascade_frontalface_alt.xml')
faces = face_detector.detectMultiScale(gray,1.1,2)
print(faces)
for x,y,w,h in faces:
cv2.rectangle(img,pt1=(x,y),pt2=(x+w,y+h),color=[0,0,255],thickness=2)
cv2.imshow('face1',img)
cv2.waitKey(0)
cv2.destroyAllWindows()

9.2 人脸增加贴纸
import cv2
img = cv2.imread('./lina.png')
gray= cv2.cvtColor(img,code=cv2.COLOR_BGRA2GRAY)
face_detector=cv2.CascadeClassifier('haarcascade_frontalface_alt.xml')
faces=face_detector.detectMultiScale(gray)
star=cv2.imread('./star.png')
for x,y,w,h in faces:
star_s=cv2.resize(star,(w//4,h//4))
w1=w//4
h1=h//4
for i in range(h1):
for j in range(w1):
if not (star_s[i,j]>200).all():
img[i+y,j+8*w//3]=star_s[i,j]
# cv2.rectangle(img,pt1=(x,y),pt2=(x+w,h+y),color=[0,0,255])
# img[y:y+h//4,x+3*w//8:x+w//4+3*w//8]=cv2.resize(star,(w//4,h//4))
cv2.imshow('face',img)
cv2.waitKey(0)
cv2.destroyAllWindows()

10 轮廓查找
11 腐蚀和膨胀
腐蚀:卷积核对应像素的值都为1,才将像素中间置1
腐蚀:卷积核对应像素的值只要有一个为1,像素中间值就为1
此片文章说的很详细
腐蚀操作:
import cv2
import numpy as np
img = cv2.imread('j.png',0)
kernel = np.ones((5,5),np.uint8)
erosion = cv2.erode(img,kernel,iterations = 1)
膨胀操作
dilation=cv2.dilate(img,kernel,iterations = 1)
12视频人脸检测
13车盘识别
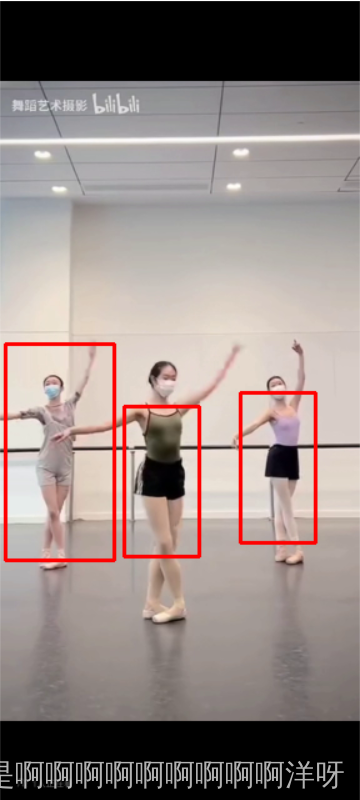
14 形态检测
import cv2
if __name__=='__main__':
video = cv2.VideoCapture('./v5.mp4')
shape1_detector=cv2.CascadeClassifier('./haarcascade_fullbody.xml')
while True:
retval,image=video.read()
print(image.shape)
image=cv2.resize(image,(288,640))
if retval == False:
break
gray = cv2.cvtColor(image,code=cv2.COLOR_BGRA2GRAY)
shape1=shape1_detector.detectMultiScale(gray,1.1,2)
for x,y,w,h in shape1:
cv2.rectangle(image,pt1=(x,y),pt2=(x+w,y+h),color=[0,0,255],thickness=2)
cv2.imshow('shape1',image)
key = cv2.waitKey(1)
if key==ord('q'):
break
cv2.destroyAllWindows()
video.release()















 4587
4587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









