








蓝桥杯 模板Template Part13:UART串口程序设计
● 改编自国信长天蓝桥杯官方蓝皮书例程,按照自己的习惯进行了补充和修改
一、UART串口基本知识
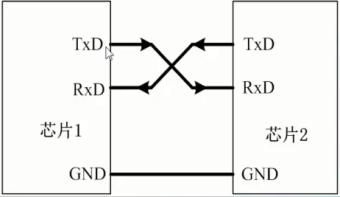
●单片机和单片机直接,都是使用TTL电平可以直接通信
●单片机和PC直接,需要进行电平转换
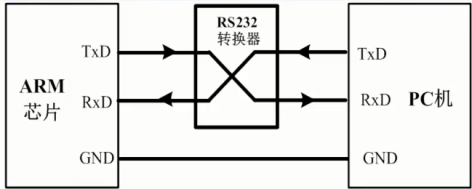
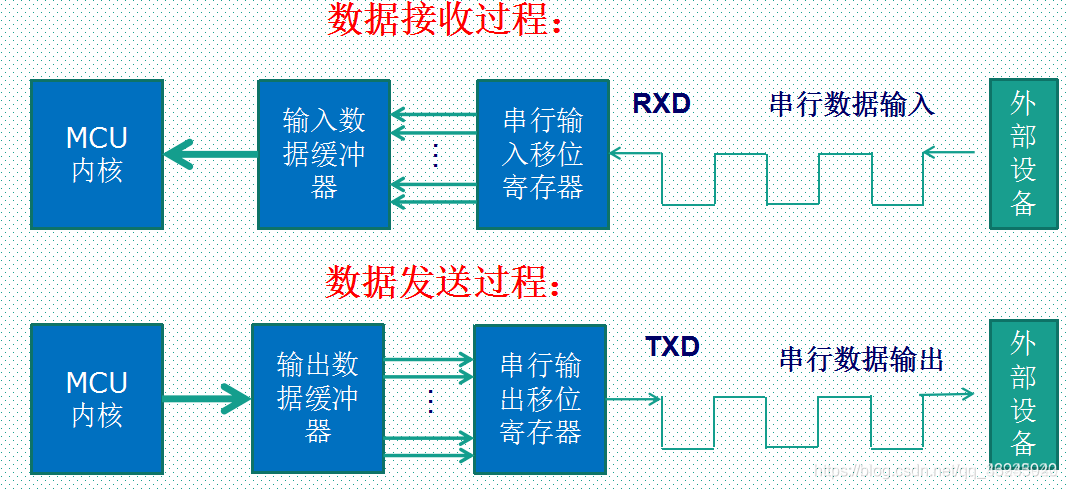
●发送接收示意图:
二、需要记住的硬件寄存器
●STC15F2K60S2系列共2个采用UART工作方式的高速全双工异步串行通信接口。
●通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),每个串行口由两个数据缓冲器、一个移位寄存器、一个串行控制寄存器、一个波特率发生器。
●SCON (Serial Control)串行控制寄存器,地址0x98,可位寻址。
○ TI发送中断请求标志位。
○ RI接收中断请求标志位。

●SBUF(Serial Buffer),串行口数据缓冲寄存器。
○发送缓冲器和接收缓冲器共用一个地址。
○对SBUF寄存器进行写操作时,写的是只写寄存器–发送缓冲器,写操作完成待发送数据的加载。
○对SBUF寄存器进行读操作时,读的是只读寄存器–接收缓冲器,读操作可以获得已接收到的数据。

●ES串行口中断允许位

三、串口1工作模式1的工作过程及初始化配置
●受限于蓝桥杯开发板,常用串口和工作模式为串口1的工作模式1。

●工作模式1的发送过程:

●工作模式1的接收过程:

●用STC-ISP的波特率计算器生成初始化代码:
使用定时器2作为波特率发生器,(定时器2不可位寻址,不方便作为定时器使用)

初始化代码:
void UartInit(void) //4800bps@12.000MHz
{
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x01; //串口1选择定时器2为波特率发生器
AUXR |= 0x04; //定时器2时钟为Fosc,即1T
T2L = 0x8F; //设定定时初值
T2H = 0xFD; //设定定时初值
AUXR |= 0x10; //启动定时器2
}
四、代码
●发送采用轮询方式:单片机发送给PC机,是单片机控制将数据装入SBUF数据缓冲器,轮循到再发送,发送完这次的数据再将 下次的数据装入SBUF,不会造成数据覆盖。
●接收采用中断方式:单片机接收数据取决于上位机是否发送,上位机的发送具有随机性,单片机无法预知。因此,需要采用中断方法,即有新数据装入SBUF接收缓冲器时,单片机就立即读取SBUF中的数据,将其保存到变量中。避免单片机没有及时处理SBUF接收缓冲器中的数据,造成新数据将就数据覆盖。
●全局变量定义
//-------------------------------------------------UART
uchar puc_Uart_Send_String[x]; //串口发送缓冲数组
uchar uc_Uart_Rece_num; //串口接收数据个数
uchar puc_Uart_Rece_String[x]; //串口接收缓冲数组
●串口中断服务程序
//UART 中断服务程序
void Uart_ISR(void) interrupt 4
{
if(RI == 1) //接收完一个字节数据
{
RI = 0; //清除RI位
puc_Uart_Rece_String[uc_Uart_Rece_num++] = SBUF; //保存串口数据
}
}
●由于 发送完一个字节数据(RI被置1) 或者 接收完一个字节数据(TI被置1)都会触发串口中断,因此进入串口中断服务函数中,需要先判断是接收还是发送中断。并且需要手动软件清除标志位。
●发送一个字节
void Uart_SendByte(unsigned char Byte) //通过串口发送一个字节
{
SBUF = Byte; //将一个字节写入SBUF,开启发送
while(TI == 0); //等待发送完成
TI = 0;
}
●发送一个字符串
void Uart_SendString(unsigned char *String) //通过串口一个字符串
{
while(*String != '\0') //检测字符串结束标志
{
Uart_SendByte(*String);//取 存储在 指针变量String上 的值给SBUF
String++;
}
}
●使用while(TI == 0);等待发送完成可以实现没有发送误差的连续发送。(STC-ISP上的例程貌似只能发送单个字符,发送字符串会出现误差)
●

●地址运算符 & : 后边跟一个变量名时,&给出该变量的地址。
●间接运算符 * :后边跟一个指针名或者地址时,*给出存储在 指针指向地址上的值。
●串口处理函数&串口接收&发送
void Uart_Proc(void)
{
if(uc_Uart_Rece_num > 1)
{
if( (puc_Uart_Rece_String[uc_Uart_Rece_num-1] == '\n') && (puc_Uart_Rece_String[uc_Uart_Rece_num-2] == '\r') )
{
if(uc_Uart_Rece_num == 4)
{
if( (puc_Uart_Rece_String[0] == 'S') && (puc_Uart_Rece_String[1] == 'T'))
{
uc_Uart_Rece_num = 0; //清零
Uart_Send_String("ST\r\n");
}
}
else if(uc_Uart_Rece_num == 6)
{
uc_Uart_Rece_num = 0; //清零
if( (puc_Uart_Rece_String[0] == 'P') && (puc_Uart_Rece_String[1] == 'A') && (puc_Uart_Rece_String[2] == 'R') && (puc_Uart_Rece_String[1] == 'A'))
{
Uart_Send_String("PARA\r\n");
}
else
{
Uart_Send_String("ERROR_1\r\n");
}
}
else
{
uc_Uart_Rece_num = 0; //清零
Uart_Send_String("ERROR_2\r\n");
}
}
}
}
Notes:
●当定义了一个大小为2的数组,使用时候索引为3,编译并不会报错,可实际运行结果是什么。待查证……
回车与换行
回车”(Carriage Return)和“换行”(Line Feed)这两个概念的来历和区别。
在Windows中:
‘\r’ 回车,回到当前行的行首,而不会换到下一行,如果接着输出的话,本行以前的内容会被逐一覆盖;
‘\n’ 换行,换到当前位置的下一行,而不会回到行首;
| 符号 | ASCII码 | 意义 |
|---|---|---|
| \n | 10 | 换行 new line |
| \r | 13 | 回车CR return |
















 1132
1132











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











