




当相机为单目是,我们只知道2D的像素坐标,因而问题是根据两组2D点估计运动
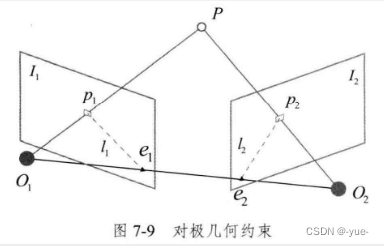
对极几何
极平面:O1,O2,p三个点组成的平面。e1,e2为极点。O1,O2为基线。l1,l2为极线。
代数描述: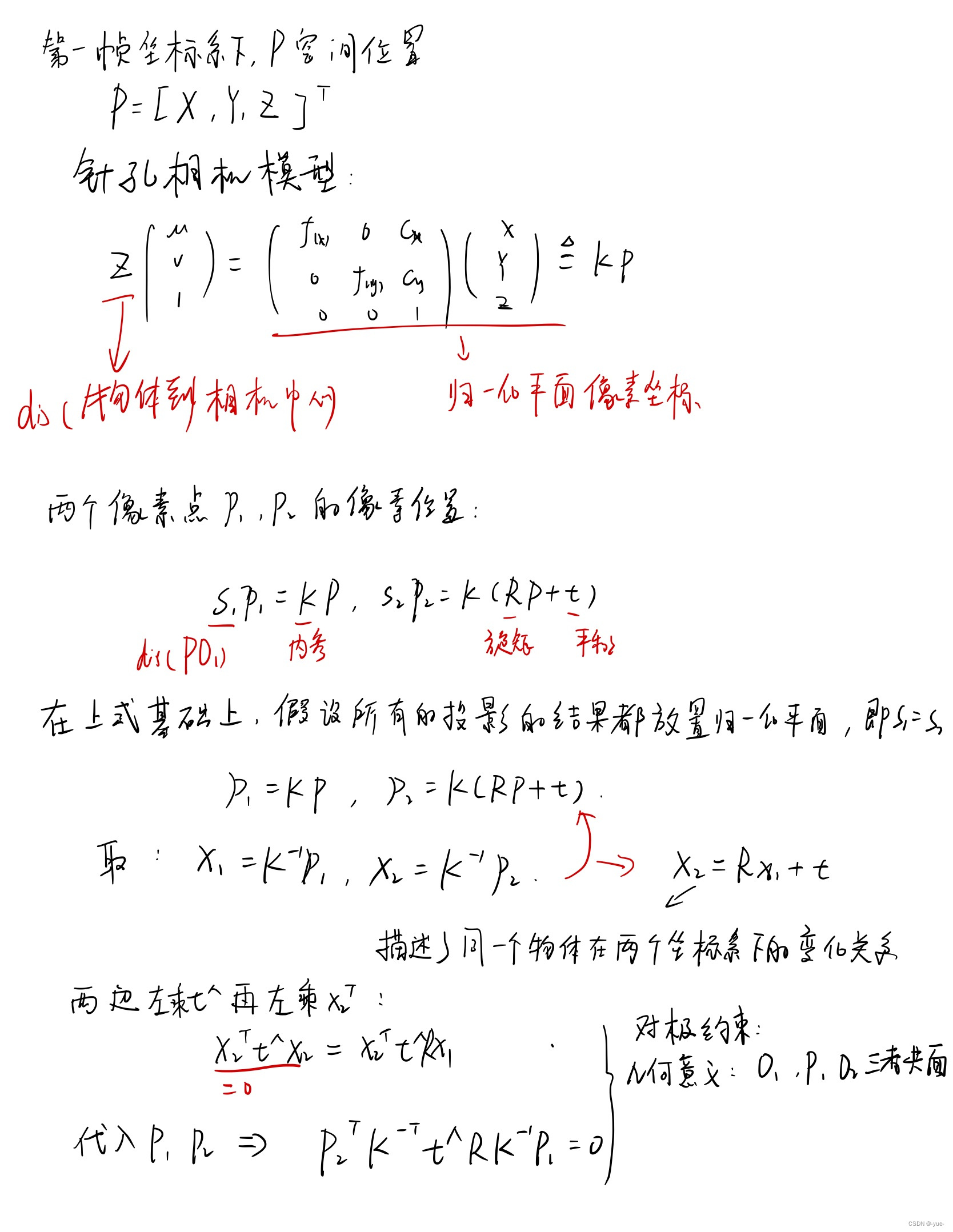
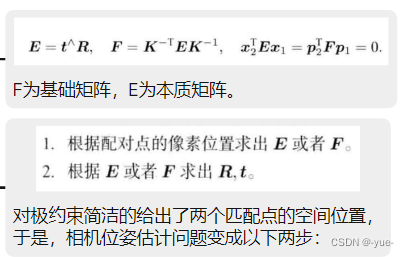
本质矩阵
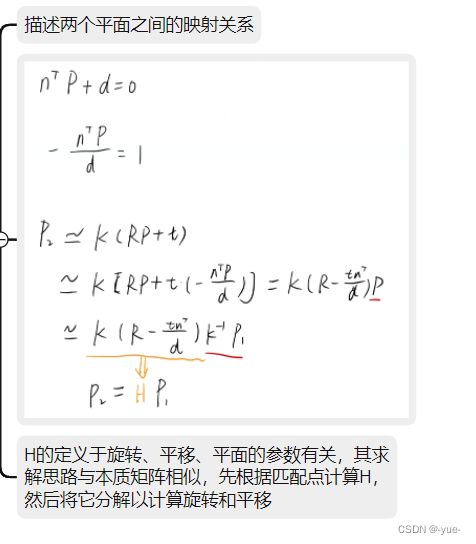
单应矩阵
当相机为单目是,我们只知道2D的像素坐标,因而问题是根据两组2D点估计运动
对极几何
极平面:O1,O2,p三个点组成的平面。e1,e2为极点。O1,O2为基线。l1,l2为极线。
代数描述:
本质矩阵
单应矩阵

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























