







文章目录
2D Transform
Scale
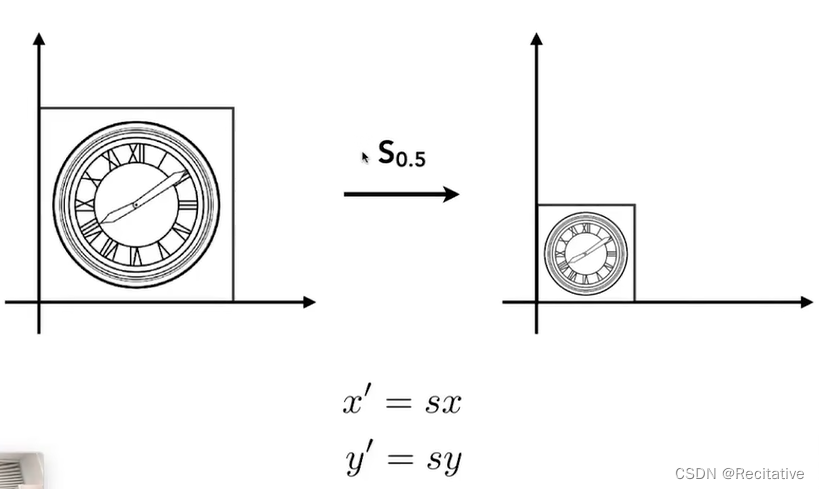
[ x ′ y ′ ] = [ s 0 0 s ] [ x y ] \left[ \begin{array}{} x' \\ y' \end{array} \right] = \left[ \begin{array}{} s & 0 \\ 0 & s \end{array} \right] \left[ \begin{array}{} x \\ y \end{array} \right] [x′y′]=[s00s][xy]
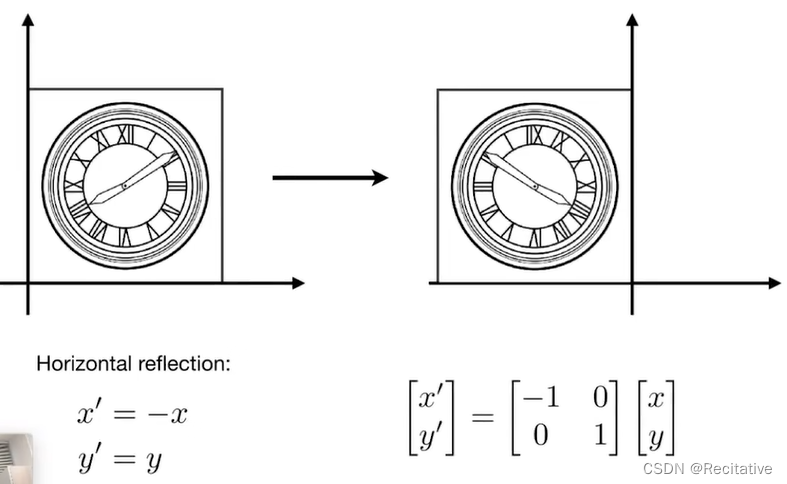
Reflection
Shear
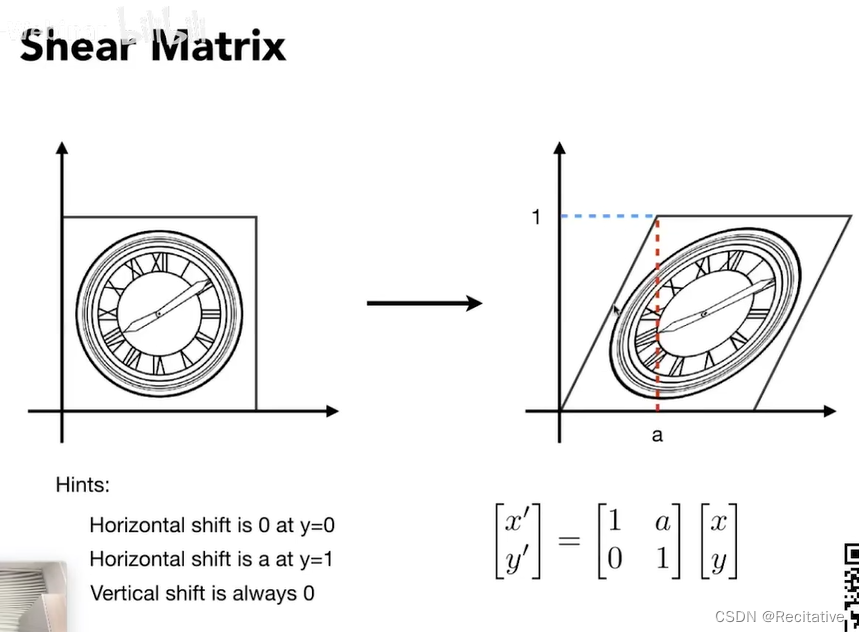
水平方向的偏移量是和y有关的线性函数,在y = 0的时候,偏移量为0,在y = 1的时候,偏移量为a,得出 偏移量 = a y 偏移量 = ay 偏移量=ay
而
x
′
=
x
+
偏移量
=
x
+
a
y
x' = x + 偏移量 = x + ay
x′=x+偏移量=x+ay,转换到矩阵表达式就是在一行二列的位置设a
[
x
′
y
′
]
=
[
1
a
0
1
]
[
x
y
]
\left[ \begin{array}{cc} x' \\ y' \end{array} \right] = \left[ \begin{array}{} 1 & a \\ 0 & 1 \end{array} \right] \left[ \begin{array}{} x \\ y \end{array} \right]
[x′y′]=[10a1][xy]
分析变换的思路:找到变换前后坐标轴的关系
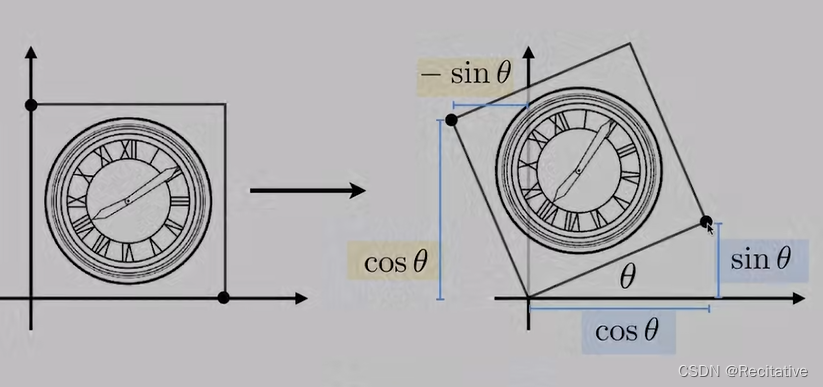
Rotate
不具体指明的话,旋转默认指围绕原点,逆时针方向。
R
θ
=
[
c
o
s
θ
−
s
i
n
θ
s
i
n
θ
c
o
s
θ
]
R_\theta = \left[ \begin{array}{} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{array} \right]
Rθ=[cosθsinθ−sinθcosθ]
推导逻辑:因为任意点都满足旋转公式,则特殊点(1,0)(0,1)也满足该条件。
这个性质3棕1蓝做过说明:在线性变换后,网格线保持平行且等距分布。
写出原始公式
[
x
′
y
′
]
=
[
A
B
C
D
]
[
x
y
]
\left[ \begin{array}{} x' \\ y' \end{array} \right] = \left[ \begin{array}{} A & B \\ C & D \end{array} \right] \left[ \begin{array}{} x \\ y \end{array} \right]
[x′y′]=[ACBD][xy]
带入特殊点
[
cos
θ
sin
θ
]
=
[
A
B
C
D
]
[
1
0
]
→
{
A
=
cos
θ
C
=
sin
θ
[
−
sin
θ
cos
θ
]
=
[
A
B
C
D
]
[
0
1
]
→
{
B
=
−
sin
θ
D
=
cos
θ
\left[ \begin{array}{} \cos\theta \\ \sin\theta \end{array} \right] = \left[ \begin{array}{} A & B \\ C & D \end{array} \right] \left[ \begin{array}{} 1 \\ 0 \end{array} \right] \rightarrow \left\{ \begin{array}{} A = \cos\theta \\ C = \sin\theta \end{array} \right. \newline \left[ \begin{array}{} -\sin\theta \\ \cos\theta \end{array} \right] = \left[ \begin{array}{} A & B \\ C & D \end{array} \right] \left[ \begin{array}{} 0 \\ 1 \end{array} \right] \rightarrow \left\{ \begin{array}{} B = -\sin\theta \\ D = \cos\theta \end{array} \right.
[cosθsinθ]=[ACBD][10]→{A=cosθC=sinθ[−sinθcosθ]=[ACBD][01]→{B=−sinθD=cosθ
如果想要旋转
−
θ
-\theta
−θ角度,则:
R
−
θ
=
[
c
o
s
θ
s
i
n
θ
−
s
i
n
θ
c
o
s
θ
]
=
R
θ
T
=
R
θ
−
1
R_{-\theta} = \left[ \begin{array}{} cos\theta & sin\theta \\ -sin\theta & cos\theta \end{array} \right] = R_\theta^T = R_\theta^{-1}
R−θ=[cosθ−sinθsinθcosθ]=RθT=Rθ−1
即旋转矩阵是一个正交矩阵,根据这个性质,当需要旋转相反角度的时候,可以直接用矩阵的转置来变换。
正交矩阵补充
对于一个矩阵M,如果其转置MT满足
M
M
T
=
M
T
M
=
I
MM^T = M^TM = I
MMT=MTM=I
则称该矩阵为正交矩阵。同时,根据矩阵逆的性质
M
M
−
1
=
M
−
1
M
=
I
MM^{-1} = M^{-1}M = I
MM−1=M−1M=I,可知对正交矩阵,其转置MT和逆M-1相等。
正交矩阵转置和逆相等的性质非常有用,可以省去求逆的大量计算,用简单的转置操作求逆矩阵。
判断一个方阵是否为正交矩阵:
对矩阵
M
=
[
a
,
b
,
c
]
T
M = [\bold{a}, \bold{b}, \bold{c}]^T
M=[a,b,c]T
其与转置
M
T
=
[
a
,
b
,
c
]
M^T = [\bold{a}, \bold{b}, \bold{c}]
MT=[a,b,c]的乘积为:
M
M
T
=
[
a
b
c
]
[
a
,
b
,
c
]
=
[
a
⋅
a
a
⋅
b
a
⋅
c
b
⋅
a
b
⋅
b
b
⋅
c
c
⋅
a
c
⋅
b
c
⋅
c
]
=
[
1
0
0
0
1
0
0
0
1
]
MM^T = \left[ \begin{array}{} \bold{a} \\ \bold{b} \\ \bold{c} \end{array} \right] \left[\bold{a}, \bold{b}, \bold{c}\right] = \newline \left[ \begin{array}{} a \cdot a & a \cdot b & a \cdot c \\ b \cdot a & b \cdot b & b \cdot c \\ c \cdot a & c \cdot b & c \cdot c \end{array} \right] = \left[ \begin{array}{} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{array} \right]
MMT=
abc
[a,b,c]=
a⋅ab⋅ac⋅aa⋅bb⋅bc⋅ba⋅cb⋅cc⋅c
=
100010001
则有下面两条结论:
- 如果一个矩阵是正交矩阵,则矩阵的每个行向量的自点积都为1,即矩阵的每个行向量都是单位矢量.
- 如果一个矩阵是正交矩阵,则矩阵的行向量相互之间的点积为0,即矩阵的行向量相互垂直。
满足这两条的矩阵就是正交矩阵。
Linear Transforms总结
上面所有的变换都可以写成线性表达式,这种变换称为线性变换
{
x
′
=
a
x
+
b
y
y
′
=
c
x
+
d
y
[
x
′
y
′
]
=
[
A
B
C
D
]
[
x
y
]
x
′
=
M
x
\left\{ \begin{array}{} x' = ax + by \\ y' = cx + dy \end{array} \right. \newline \newline \left[ \begin{array}{} x' \\ y' \end{array} \right] = \left[ \begin{array}{} A & B \\ C & D \end{array} \right] \left[ \begin{array}{} x \\ y \end{array} \right] \newline \newline x' = Mx
{x′=ax+byy′=cx+dy[x′y′]=[ACBD][xy]x′=Mx
Homogeneous Coordinate(齐次坐标)
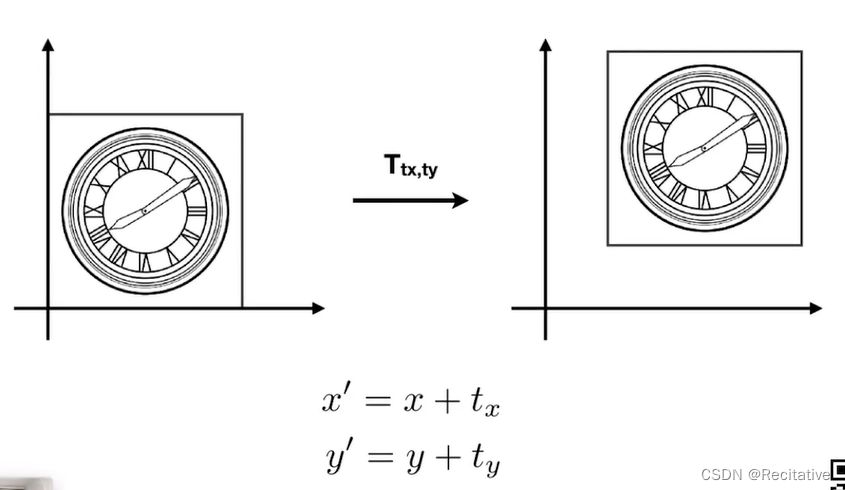
Translation
尝试写成矩阵形式:
[
x
′
y
′
]
=
[
A
B
C
D
]
[
x
y
]
+
[
t
x
t
y
]
\left[ \begin{array}{} x' \\ y' \end{array} \right] = \left[ \begin{array}{} A & B \\ C & D \end{array} \right] \left[ \begin{array}{} x \\ y \end{array} \right] + \left[ \begin{array}{} t_x \\ t_y \end{array} \right]
[x′y′]=[ACBD][xy]+[txty]
能够看出来,Translation不是一种线性变换,这种变换称为Affine Map,仿射变换。且线性变换和平移的顺序是,先进行线性变换,再进行平移。
为了避免将Translation当作特例处理,将所有的变换都描述为同一种表示方式,就引入了齐次坐标(Homogeneous Coordinate),所有的仿射变换都可以写为齐次变换。
Homogeneous Coordinate
给2D的点和向量增加一个维度:
- 2D point = (x, y, 1)T
- 2D vector = (x, y, 0)T
第三个维度的取值主要看向量表示的是点还是向量
向量后面用0的原因,首先是为了保护向量,保证平移不变性;其次是为了符合下面的运算:
- vector + vector = vector
- point - point = vector
- point + vector = point
- point + point = ??
对于最后一种运算,齐次坐标的点 ( x y w ) \left( \begin{array}{} x \\ y \\ w \end{array} \right) xyw 实际表示的是 ( x / w y / w 1 ) \left( \begin{array}{} x/w \\ y/w \\ 1 \end{array} \right) x/wy/w1 在这种定义下,两点之和为两点的中点。
用增加维度后的向量和矩阵表示Translate
[
x
′
y
′
w
′
]
=
[
1
0
t
x
0
1
t
y
0
0
1
]
[
x
y
1
]
=
[
x
+
t
x
y
+
t
y
1
]
\left[ \begin{array}{} x' \\ y' \\ w' \end{array} \right] = \left[ \begin{array}{} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{array} \right] \left[ \begin{array}{} x \\ y \\ 1 \end{array} \right] = \left[ \begin{array}{} x + t_x \\ y + t_y \\ 1 \end{array} \right]
x′y′w′
=
100010txty1
xy1
=
x+txy+ty1
综上,得到齐次变换和仿射变换的转换关系
[
x
′
y
′
]
=
[
A
B
C
D
]
[
x
y
]
+
[
t
x
t
y
]
[
x
′
y
′
w
′
]
=
[
A
B
t
x
C
D
t
y
0
0
1
]
[
x
y
1
]
=
[
A
x
+
B
y
+
t
x
C
x
+
D
y
+
t
y
1
]
\left[ \begin{array}{} x' \\ y' \end{array} \right] = \left[ \begin{array}{} A & B \\ C & D \end{array} \right] \left[ \begin{array}{} x \\ y \end{array} \right] + \left[ \begin{array}{} t_x \\ t_y \end{array} \right] \newline\newline \left[ \begin{array}{} x' \\ y' \\ w' \end{array} \right] = \left[ \begin{array}{} A & B & t_x \\ C & D & t_y \\ 0 & 0 & 1 \end{array} \right] \left[ \begin{array}{} x \\ y \\ 1 \end{array} \right] = \left[ \begin{array}{} Ax + By + t_x \\ Cx + Dy + t_y \\ 1 \end{array} \right]
[x′y′]=[ACBD][xy]+[txty]
x′y′w′
=
AC0BD0txty1
xy1
=
Ax+By+txCx+Dy+ty1
这里要注意,只有在表示二维仿射变换的情况下,最后一行才是(0, 0, 1)
其他的一些变换
Inverse Transform
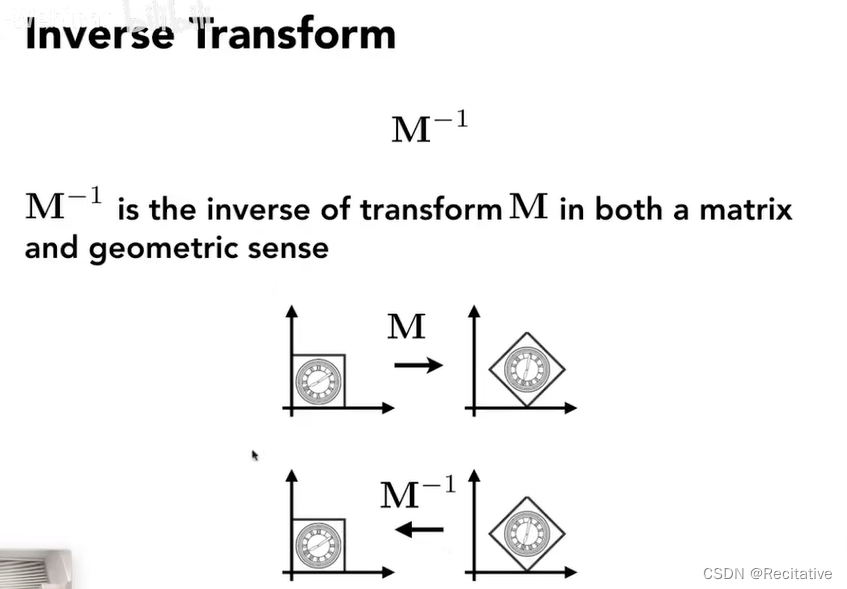
对应数学上的逆矩阵。
Composite Transform

矩阵的乘法,需要从右向左读,因为矩阵乘法不满足交换率,所以不同变换顺序结果不同。
Decomposing Transform
例如想要绕着特定的点c旋转,如下图
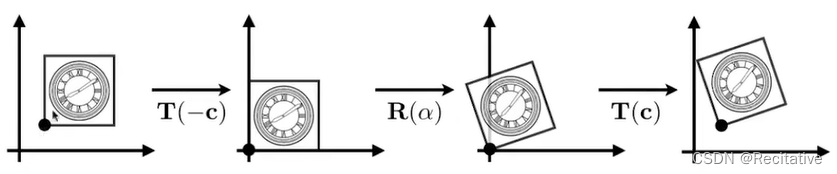
因为旋转只能绕原点进行,所以首先要将点移动回原点,然后进行旋转,旋转后再移回去。
T
(
c
)
⋅
R
(
α
)
⋅
T
(
−
c
)
T(c)·R(\alpha)·T(-c)
T(c)⋅R(α)⋅T(−c)
3D Transform
3维空间也会涉及平移,所以也需要齐次坐标
- 3D point = (x, y, z, 1)T
- 3D vector = (x, y, z, 0)T
[ x ′ y ′ w ′ 1 ] = [ A B C t x D E F t y G H I t z 0 0 0 1 ] [ x y z 1 ] \left[ \begin{array}{} x' \\ y' \\ w' \\1 \end{array} \right] = \left[ \begin{array}{} A & B & C & t_x \\ D & E & F & t_y \\ G & H & I & t_z \\ 0 & 0 & 0 & 1 \end{array} \right] \left[ \begin{array}{} x \\ y \\ z \\ 1 \end{array} \right] x′y′w′1 = ADG0BEH0CFI0txtytz1 xyz1
Scale
S ( s x , s y , s z ) = ( s x 0 0 0 0 s y 0 0 0 0 s z 0 0 0 0 1 ) S(s_x, s_y, s_z) = \left(\begin{array}{} s_x & 0 & 0 & 0\\ 0 & s_y & 0 & 0\\ 0 & 0 & s_z & 0\\ 0 & 0 & 0 & 1 \end{array}\right) S(sx,sy,sz)= sx0000sy0000sz00001
Translation
T ( t x , t y , t z ) = ( 1 0 0 t x 0 1 0 t y 0 0 1 t z 0 0 0 1 ) T(t_x, t_y, t_z) = \left(\begin{array}{} 1 & 0 & 0 & t_x\\ 0 & 1 & 0 & t_y\\ 0 & 0 & 1 & t_z\\ 0 & 0 & 0 & 1 \end{array}\right) T(tx,ty,tz)= 100001000010txtytz1
Rotation
Around x-, y-, or z-axis
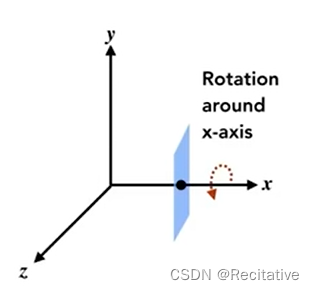
R x ( α ) = ( 1 0 0 0 0 cos α − sin α 0 0 sin α cos α 0 0 0 0 1 ) R x ( α ) = ( cos α − sin α 0 0 sin α cos α 0 0 0 0 1 0 0 0 0 1 ) R x ( α ) = ( cos α 0 sin α 0 0 1 0 0 − sin α 0 cos α 0 0 0 0 1 ) , y 是反的原因是, z × x 的结果才是 + y ,而矩阵的顺序是 x × z ,所以是反过来的 也可以结合图来推导。 R_x(\alpha) = \left(\begin{array}{} 1 & 0 & 0 & 0\\ 0 & \cos\alpha & -\sin\alpha & 0\\ 0 & \sin\alpha & \cos\alpha & 0\\ 0 & 0 & 0 & 1 \end{array}\right) \newline\newline R_x(\alpha) = \left(\begin{array}{} \cos\alpha & -\sin\alpha & 0 & 0\\ \sin\alpha & \cos\alpha & 0 & 0\\ 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1 \end{array}\right) \newline\newline R_x(\alpha) = \left(\begin{array}{} \cos\alpha & 0 & \sin\alpha & 0\\ 0 & 1 & 0 & 0\\ -\sin\alpha & 0 & \cos\alpha & 0\\ 0 & 0 & 0 & 1 \end{array}\right), \newline y是反的原因是,\bold{z} \times \bold{x} 的结果才是+y,而矩阵的顺序是\bold{x} \times \bold{z} ,所以是反过来的\newline 也可以结合图来推导。 Rx(α)= 10000cosαsinα00−sinαcosα00001 Rx(α)= cosαsinα00−sinαcosα0000100001 Rx(α)= cosα0−sinα00100sinα0cosα00001 ,y是反的原因是,z×x的结果才是+y,而矩阵的顺序是x×z,所以是反过来的也可以结合图来推导。
Compose of Rx, Ry, Rz
R x y z ( α , β , γ ) = R x ( α ) R y ( β ) R z ( γ ) R_{xyz}(\alpha, \beta, \gamma) = R_x(\alpha)R_y(\beta)R_z(\gamma) Rxyz(α,β,γ)=Rx(α)Ry(β)Rz(γ)
复杂旋转可以被分解为绕x, y, z轴旋转的方法
使用Rodrigues’ Rotation公式,沿任意轴旋转。
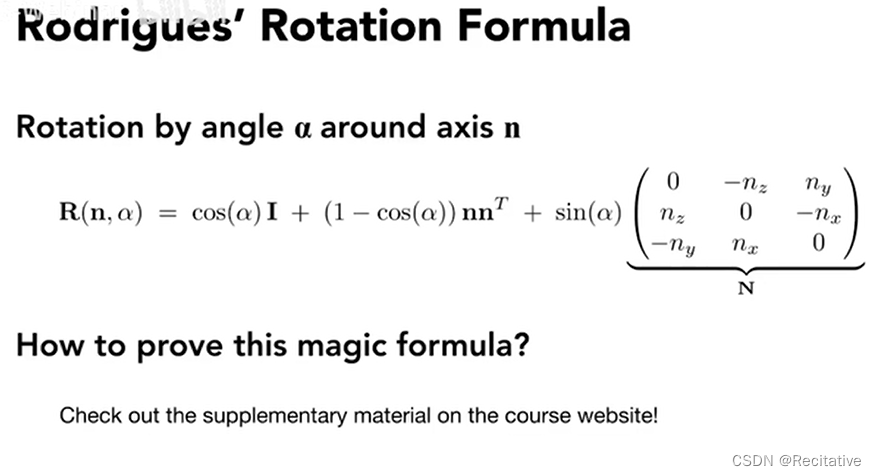
这个公式的结果是一个旋转矩阵,这个矩阵和一个轴n与角度α相关。轴n是默认过原点的,如果想沿着任意起点,可以先translate,再rotation,最后translate回去。
有关最后面的反称矩阵,上一章线性代数,补充了反称矩阵的内容
Viewing Transformation
View / Camera Transformation 视图变换
从模型到图像的过程可以简化为:Model > View > Projection,也就是MVP矩阵
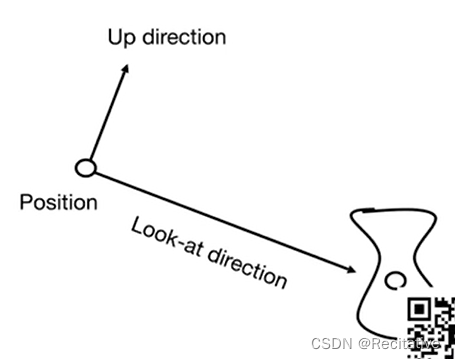
首先要定义相机属性:
- Position e \bold e e
- Look-at / gaze direction g ^ \hat{g} g^
- Up direction t ^ \hat t t^
将空间中相机的变换和物体的变换,简化为相机固定(位置原点,沿-z看,y轴向上),其他物体变换;
那么首先需要变换相机,使用下面的Mview
- Translate e to origin
- Rotates g to -z
- Rotates t to y
- Rotates (g x t) to x
M v i e w = R v i e w T v i e w T v i e w = [ 1 0 0 − x e 0 1 0 − y e 0 0 1 − z e 0 0 0 1 ] 虽然正向的 R v i e w ,即 g → − z , t → y , ( g × t ) → x 不是很好写。 但是其逆矩阵易于求得,即 x → ( g × t ) , y → t , z → − g ,易求得: R v i e w − 1 = [ x g × t x t x − g 0 y g × t y t y − g 0 z g × t z t z − g 0 0 0 0 1 ] 旋转矩阵满足正交矩阵的条件,因此 R v i e w − 1 = R v i e w T ,故有 R v i e w = [ x g × t y g × t z g × t 0 x t y t z t 0 x − g y − g z − g 0 0 0 0 1 ] M_{view} = R_{view}T_{view} \newline T_{view} = \left[ \begin{array}{} 1 & 0 & 0 & -x_e\\ 0 & 1 & 0 & -y_e\\ 0 & 0 & 1 & -z_e\\ 0 & 0 & 0 & 1 \end{array} \right] \newline 虽然正向的R_{view},即g \to -z, t \to y, (g \times t) \to x 不是很好写。 \newline 但是其逆矩阵易于求得,即 x \to (g \times t), y \to t, z \to -g,易求得: \newline R^{-1}_{view} = \left[ \begin{array}{} x_{g \times t} & x_t & x_{-g} & 0\\ y_{g \times t} & y_t & y_{-g} & 0\\ z_{g \times t} & z_t & z_{-g} & 0\\ 0 & 0 & 0 & 1 \end{array}\right] \newline 旋转矩阵满足正交矩阵的条件,因此R_{view}^{-1} = R_{view}^T,故有 \newline R_{view} = \left[ \begin{array}{} x_{g \times t} & y_{g \times t} & z_{g \times t} & 0\\ x_t & y_t & z_t & 0\\ x_{-g} & y_{-g} & z_{-g} & 0\\ 0 & 0 & 0 & 1 \end{array}\right] Mview=RviewTviewTview= 100001000010−xe−ye−ze1 虽然正向的Rview,即g→−z,t→y,(g×t)→x不是很好写。但是其逆矩阵易于求得,即x→(g×t),y→t,z→−g,易求得:Rview−1= xg×tyg×tzg×t0xtytzt0x−gy−gz−g00001 旋转矩阵满足正交矩阵的条件,因此Rview−1=RviewT,故有Rview= xg×txtx−g0yg×tyty−g0zg×tztz−g00001
Projection
投影是3D到2D的过程,存在两种不同的投影方式:Orthographic和Perspective(正交和透视)。
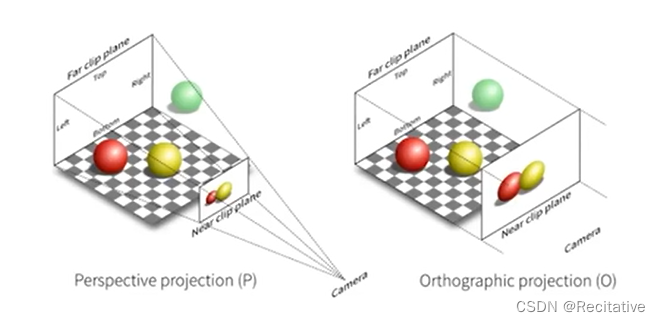
正交投影不会近大远小,而透视投影会。
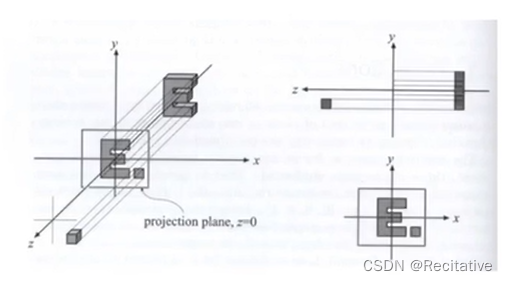
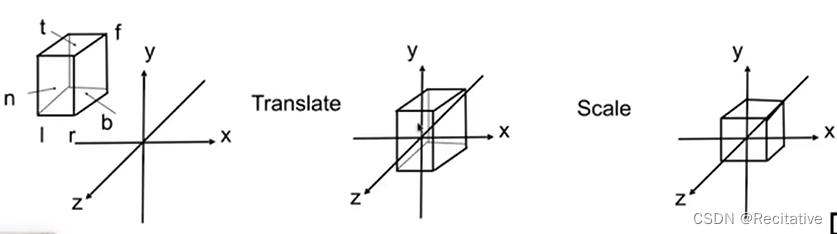
Orthographic Projection
通俗的来理解,正交投影就是:
- 相机位于原点,看向z轴负向,相机上方为y轴正向
- 抛弃z坐标(从而压扁成一张图像)
- 将结果缩放到[-1,1]2的矩形上
缩放的目的是方便后续操作,例如裁剪和屏幕映射。
在实际的实现过程中,通常为:
-
将空间中的立方体[l, r] x [b, t] x [f, n],映射到标准立方体(Canonical Cube)[-1, 1]3
因为看向负z,所以f(远far)要比n(近near)的值小(这是右手系需要注意的问题)。
OpenGL采用的左手系可以避免,但会产生其他问题
这个被标准化的立方体是用户自己定义的,也叫Axis-aligned bounding box, AABB,轴对称包围盒,AABB box的面法线与标准基重叠。。
-
第一步,中心移到原点
M T r a n s l a t e = [ 1 0 0 − l + r 2 0 1 0 − t + b 2 0 0 1 − n + f 2 0 0 0 1 ] M_{Translate} = \left[ \begin{array}{} 1 & 0 & 0 & -\frac{l + r} {2} \\ 0 & 1 & 0 & -\frac{t + b} {2} \\ 0 & 0 & 1 & -\frac{n + f} {2} \\ 0 & 0 & 0 & 1 \end{array} \right] MTranslate= 100001000010−2l+r−2t+b−2n+f1 -
第二步,映射到标准立方体(边长为2)
M S c a l e = [ 2 r − l 0 0 0 0 2 t − b 0 0 0 0 2 n − f 0 0 0 0 1 ] M_{Scale} = \left[\begin{array}{} \frac {2} {r - l} & 0 & 0 & 0 \\ 0 & \frac {2} {t - b} & 0 & 0 \\ 0 & 0 & \frac {2} {n - f} & 0 \\ 0 & 0 & 0 & 1 \end{array} \right] MScale= r−l20000t−b20000n−f200001 -
合并
M O r t h o = [ 2 r − l 0 0 0 0 2 t − b 0 0 0 0 2 n − f 0 0 0 0 1 ] [ 1 0 0 − l + r 2 0 1 0 − t + b 2 0 0 1 − n + f 2 0 0 0 1 ] = [ 2 r − l 0 0 − l + r r − l 0 2 t − b 0 − t + b t − b 0 0 2 n − f − n + f n − f 0 0 0 1 ] M_{Ortho} = \left[\begin{array}{} \frac {2} {r - l} & 0 & 0 & 0 \\ 0 & \frac {2} {t - b} & 0 & 0 \\ 0 & 0 & \frac {2} {n - f} & 0 \\ 0 & 0 & 0 & 1 \end{array} \right] \left[ \begin{array}{} 1 & 0 & 0 & -\frac{l + r} {2} \\ 0 & 1 & 0 & -\frac{t + b} {2} \\ 0 & 0 & 1 & -\frac{n + f} {2} \\ 0 & 0 & 0 & 1 \end{array} \right] \newline = \left[ \begin{array}{} \frac 2 {r - l} & 0 & 0 & -\frac{l + r} {r - l} \\ 0 & \frac 2 {t - b} & 0 & -\frac{t + b} {t - b} \\ 0 & 0 & \frac 2 {n - f} & -\frac{n + f} {n - f} \\ 0 & 0 & 0 & 1 \end{array} \right] MOrtho= r−l20000t−b20000n−f200001 100001000010−2l+r−2t+b−2n+f1 = r−l20000t−b20000n−f20−r−ll+r−t−bt+b−n−fn+f1
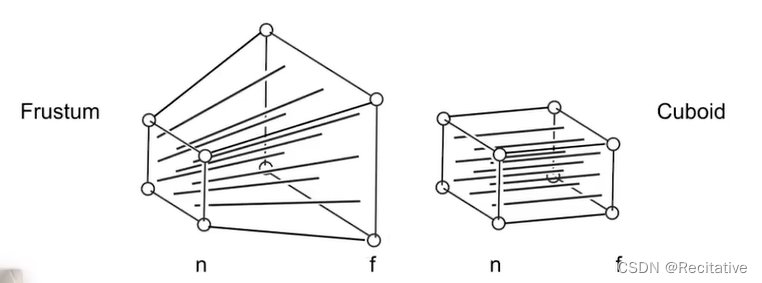
Perspective Projection
使用最广泛的投影,具有近大远小的性质;在视觉上表现为平行线不再平行,而是交于一点。
首先重新强调下齐次坐标中的一条性质(有用):
- 在齐次坐标下,(x, y, z, 1), (kx, ky, kz, k)(k !=0), (xz, yz, z2, z)(z !=0)都表示同一个点(x, y, z)
如何进行透视投影?
- 首先将锥体压成一个立方体(Mpersp to Mortho),有一些规定(使得压缩后结果唯一):
- 近平面永远不变
- 远平面z值不变,只在平面内收缩(注意只是远平面z不变,意味着除了近远平面z都可能变)
- 远平面中心点挤压后还是中心点。
- 做正交投影(上一节的内容)
x, y行
如图,点(x’, y’, z’)是近平面的点(近平面的点永远不变),以该点为参照,考虑对远平面的点(x, y, z)进行变换
已知变换后的z值不变,y在变换后与y’等高,两者关系根据相似三角形可以推得:
y
′
=
n
z
y
y' = \frac n z y
y′=zny
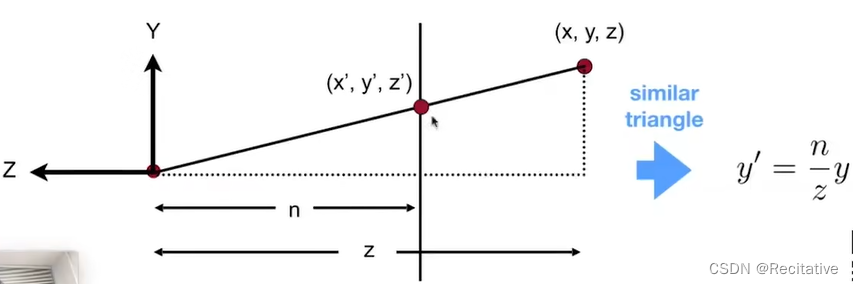
该式反映了任意一点的y值如何被挤压成与近平面一致,x值亦同理。
用矩阵来表示的话:
M
p
e
r
s
p
→
o
r
t
h
o
4
×
4
(
x
y
z
1
)
=
(
n
z
x
n
z
y
u
n
k
n
o
w
n
1
)
因为同乘一个非
0
值,仍然表示同一个点,所以可以同乘
z
(为了简化计算),则
上式
=
(
n
x
n
y
u
n
k
n
o
w
n
z
)
M_{persp \rightarrow ortho} ^{4 \times 4} \left( \begin{array}{} x \\ y \\ z \\ 1 \end{array}\right) =\left( \begin{array}{} \frac n z x \\ \frac n z y \\ unknown \\ 1 \end{array}\right) \newline 因为同乘一个非0值,仍然表示同一个点,所以可以同乘z(为了简化计算),则 \newline 上式 = \left( \begin{array}{} nx \\ ny \\ unknown \\ z \end{array}\right)
Mpersp→ortho4×4
xyz1
=
znxznyunknown1
因为同乘一个非0值,仍然表示同一个点,所以可以同乘z(为了简化计算),则上式=
nxnyunknownz
从而可以部分推得变换矩阵:
M
p
e
r
s
p
→
o
r
t
h
o
4
×
4
=
[
n
0
0
0
0
n
0
0
?
?
?
?
0
0
1
0
]
M_{persp \rightarrow ortho} ^{4 \times 4} = \left[ \begin{array}{} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ ? & ? & ? & ? \\ 0 & 0 & 1 & 0 \\ \end{array}\right]
Mpersp→ortho4×4=
n0?00n?000?100?0
z行
接着推导z的变换。已知:
- 近平面的点不会变化
- 远平面点的z值不变,远平面中心点不变
开始带入特殊点。设近平面一点(x, y, n, 1),对其进行变换:
M
p
e
r
s
p
→
o
r
t
h
o
4
×
4
(
x
y
n
1
)
=
(
x
y
n
1
)
=
=
(
n
x
n
y
n
2
n
)
M_{persp \rightarrow ortho} ^{4 \times 4} \left( \begin{array}{} x \\ y \\ n \\ 1 \end{array}\right) =\left( \begin{array}{} x \\ y \\ n \\ 1 \end{array}\right) ==\left( \begin{array}{} nx \\ ny \\ n^2 \\ n \end{array}\right)
Mpersp→ortho4×4
xyn1
=
xyn1
==
nxnyn2n
可以注意到z值变换与x, y无关,则变换矩阵的第三行应该是类似(0 0 A B)的形式。
同理,设远平面中心点(0, 0, f, 1),进行变换
M
p
e
r
s
p
→
o
r
t
h
o
4
×
4
(
0
0
f
1
)
=
(
0
0
f
1
)
=
=
(
0
0
f
2
f
)
M_{persp \rightarrow ortho} ^{4 \times 4} \left( \begin{array}{} 0 \\ 0 \\ f \\ 1 \end{array}\right) =\left( \begin{array}{} 0 \\ 0 \\ f \\ 1 \end{array}\right) ==\left( \begin{array}{} 0 \\ 0 \\ f^2 \\ f \end{array}\right)
Mpersp→ortho4×4
00f1
=
00f1
==
00f2f
可得
{
A
n
+
B
=
n
2
A
f
+
B
=
f
2
→
{
A
=
n
+
f
B
=
−
n
f
M
p
e
r
s
p
→
o
r
t
h
o
4
×
4
=
[
n
0
0
0
0
n
0
0
0
0
n
+
f
−
n
f
0
0
1
0
]
\left\{ \begin{array}{} An + B = n^2 \\ Af + B = f^2 \end{array} \right. \newline\rightarrow \left\{ \begin{array}{} A = n + f \\ B = -nf \end{array} \right. \newline\newline M_{persp \rightarrow ortho} ^{4 \times 4} = \left[ \begin{array}{} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n + f & -nf \\ 0 & 0 & 1 & 0 \\ \end{array}\right]
{An+B=n2Af+B=f2→{A=n+fB=−nfMpersp→ortho4×4=
n0000n0000n+f100−nf0
从而推得透视变换的矩阵为:
M
P
r
e
s
p
=
M
O
r
t
h
o
M
P
r
e
s
p
→
O
r
t
h
o
=
[
2
r
−
l
0
0
−
l
+
r
r
−
l
0
2
t
−
b
0
−
t
+
b
t
−
b
0
0
2
n
−
f
−
n
+
f
n
−
f
0
0
0
1
]
[
n
0
0
0
0
n
0
0
0
0
n
+
f
−
n
f
0
0
1
0
]
=
[
2
n
r
−
l
0
−
l
+
r
r
−
l
0
0
2
n
t
−
b
−
t
+
b
t
−
b
0
0
0
n
+
f
n
−
f
−
2
n
f
n
−
f
0
0
1
0
]
M_{Presp} = M_{Ortho}M_{Presp \rightarrow Ortho} =\left[ \begin{array}{} \frac 2 {r - l} & 0 & 0 & -\frac{l + r} {r - l} \\ 0 & \frac 2 {t - b} & 0 & -\frac{t + b} {t - b} \\ 0 & 0 & \frac 2 {n - f} & -\frac{n + f} {n - f} \\ 0 & 0 & 0 & 1 \end{array} \right] \left[ \begin{array}{} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n + f & -nf \\ 0 & 0 & 1 & 0 \\ \end{array}\right] \newline = \left[ \begin{array}{} \frac {2n} {r - l} & 0 & -\frac{l + r} {r - l} & 0\\ 0 & \frac {2n} {t - b} & -\frac{t + b} {t - b} & 0\\ 0 & 0 & \frac {n + f} {n - f} & -\frac {2nf} {n - f} \\ 0 & 0 & 1 & 0 \end{array} \right]
MPresp=MOrthoMPresp→Ortho=
r−l20000t−b20000n−f20−r−ll+r−t−bt+b−n−fn+f1
n0000n0000n+f100−nf0
=
r−l2n0000t−b2n00−r−ll+r−t−bt+bn−fn+f100−n−f2nf0
Question
对于除了远近平面外任意一个点,在变换后,其z值是否会发生变化?
换句话说,以 z = n + f 2 z= \frac {n + f} 2 z=2n+f为例,该点在变换后,会被推向近平面还是远平面?
摘自RTR4:One effect of using a perspective transormation is that the computed depth value does not vary linearly with the input pz value. Using any of Equations to multiply with a point
p
\bold{p}
p, we can see that
v
=
M
P
e
r
s
p
p
=
(
.
.
.
.
.
.
A
p
z
+
B
±
p
z
)
=
(
.
.
.
.
.
.
A
p
z
+
B
p
z
±
1
)
以上面推导的公式为例,
A
=
n
+
f
n
−
f
,
B
=
−
2
n
f
n
−
f
v = M_{Persp}p = \left(\begin{array}{}... \\ ... \\ Ap_z + B \\ \pm p_z \end{array} \right) = \left(\begin{array}{}... \\ ... \\ \frac {Ap_z + B} {p_z} \\ \pm 1 \end{array} \right) \newline 以上面推导的公式为例,A = \frac {n + f} {n - f}, B = -\frac {2nf} {n - f}
v=MPerspp=
......Apz+B±pz
=
......pzApz+B±1
以上面推导的公式为例,A=n−fn+f,B=−n−f2nf
可以看出来,z值变化和近远平面的位置有关(Placement of the near and far planes affects the precision of z-buffer)
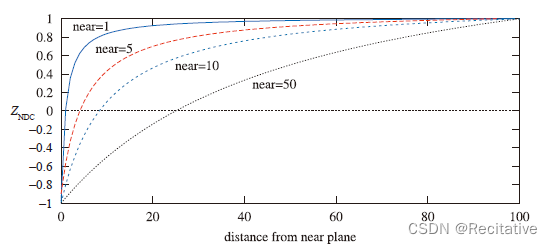
从上图(同样摘自RTR4)上来看,最终的z值都偏大,即被推向远平面?
进一步思考,近平面离原点越远,透视视体越接近正交视体的形状,在图中表现为,随着近平面距离的增加,曲线越来越接近对角线,且该趋势是单向的,所以z值应当是始终被推向远平面。
透视投影视体的推导
- 变换为正交投影的矩阵,只需要近远平面的z值(即zNear和zFar)。
- 正交投影的变换矩阵,需要定义l, r, b, t(根据视锥体的fov和aspect ratio计算)。
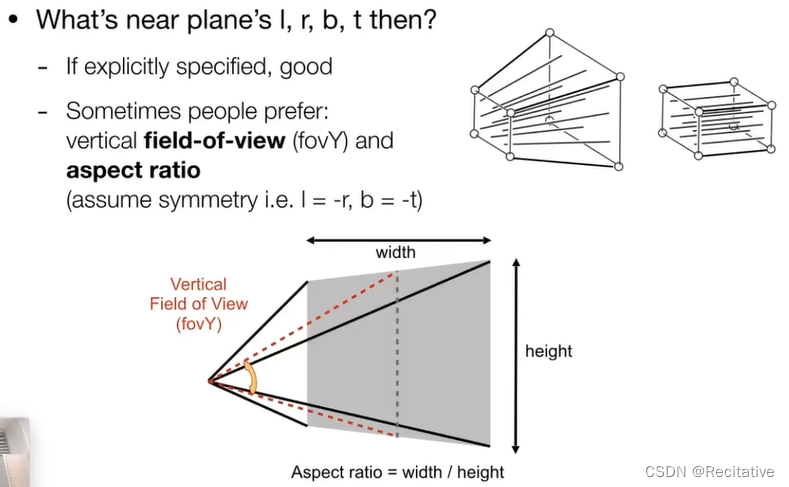
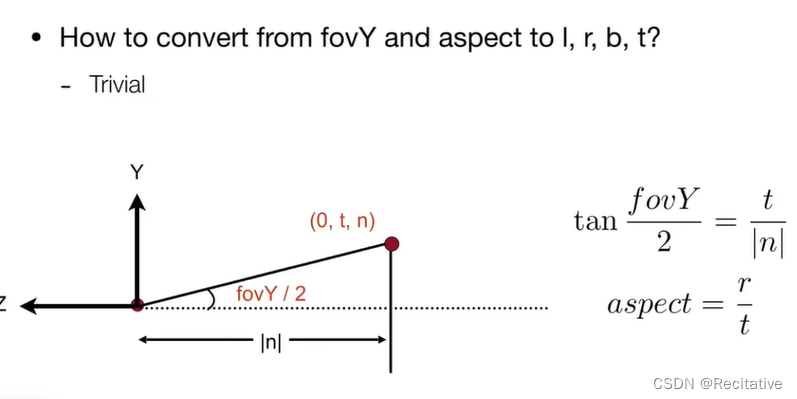
转换为l, r, b, t(近平面的)
- 计算b, t:通过fovY / 2夹角的三角关系。
tan
f
o
v
Y
2
=
t
∣
n
∣
\tan \frac {fovY} 2 = \frac t {|n|}
tan2fovY=∣n∣t
b = − t b = -t b=−t - 计算l, r: a s p e c t r a t i o = r t aspect\space ratio = \frac r t aspect ratio=tr
Screen Mapping
将标准立方体的宽度和高度拉伸到屏幕的width和height,z值暂时不处理。
-
标准立方体的边长为2,所以缩放要先除2
[ w i d t h 2 0 0 0 0 h e i g h t 2 0 0 0 0 1 0 0 0 0 1 ] \left[\begin{array}{}\frac {width} 2 & 0 & 0 & 0 \\0 & \frac {height} 2 & 0 & 0 \\0 & 0 & 1 & 0 \\0 & 0 & 0 & 1\end{array} \right] 2width00002height0000100001 -
还需要对其原点位置,例如以左下角为原点
[ w i d t h 2 0 0 w i d t h 2 0 h e i g h t 2 0 h e i g h t 2 0 0 1 0 0 0 0 1 ] \left[\begin{array}{}\frac {width} 2 & 0 & 0 & \frac {width} 2 \\0 & \frac {height} 2 & 0 & \frac {height} 2 \\0 & 0 & 1 & 0 \\0 & 0 & 0 & 1\end{array} \right] 2width00002height0000102width2height01
参考
- GAMES101
- 3blue1brown-线性代数的本质
- 《Unity Shader入门精要》
- 《Real Time Rendering 4th Edition》



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











