






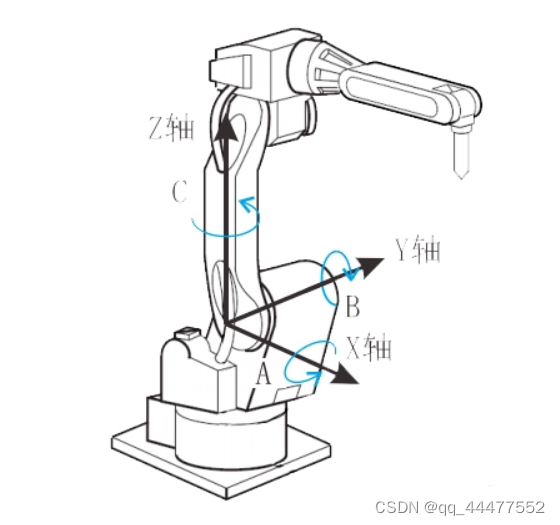
1.地球坐标系。
地球(世界)坐标系是固定在空间上的标准直角坐标系,固定在事先确定的位置。基于坐标系设置用户坐标系。地球坐标系也叫直角坐标,每种机器人对应的直角坐标方向不同,对应的直角坐标原点位置也不同。机器人相关参数设定完成后,直角坐标的零点和方向就确定了,不修改参数的情况下无法修改直角坐标。不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动;对于六轴机器人,还可执行A、B、C旋转,A轴绕X轴旋转,B轴绕Y轴旋转,C轴绕Z轴旋转,遵从右手螺旋法则。
2.基坐标系。
基坐标系由机器人底座基点和坐标位置组成,是机器人其他坐标系的基础。
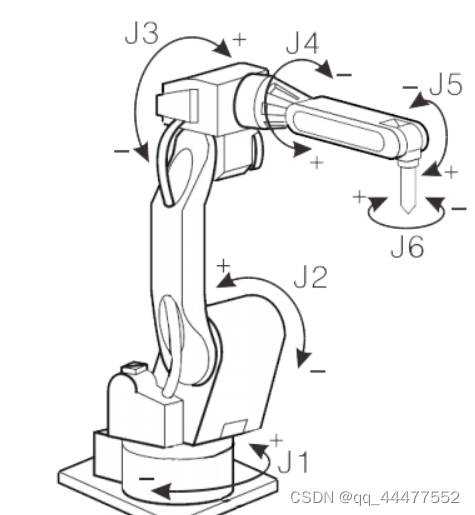
3.关节坐标系。
关节坐标系是设置在机器人关节中的坐标系,是每个轴相对于其原点位置的绝对角度。
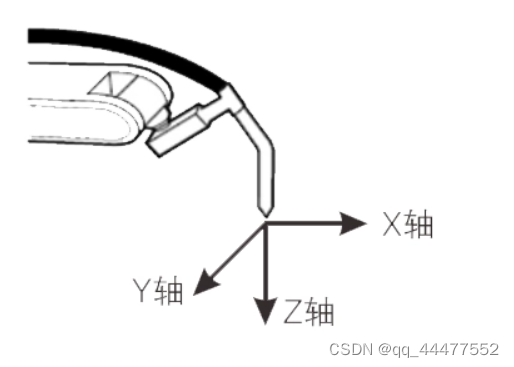
4.工具坐标系。
工具坐标系把机器人腕部法兰盘所持工具的有效方向作为Z 轴,并把坐标定义在工具的尖端点。0号工具坐标为基础工具坐标,不可设定、修改,该坐标与直角坐标相同。工具坐标1-49号用户可根据实际工具情况进行设定。
工具坐标系用于确定工具的位置,由工具中心点(TCP)和坐标位置组成。必须提前设置工具坐标系。默认工具坐标系将在没有定义的情况下取代坐标系。
工具坐标系可以通过N(N>=4)点法确定:机器人TCP可以通过N种不同的姿势与指定点接触获得多组解,通过计算获得当前TCP与工具安装法兰中心点(tol0)的相应位置,坐标系方向与tool0一致。
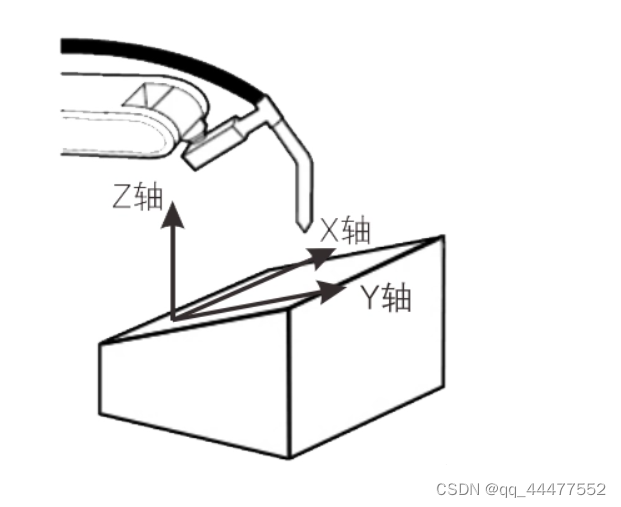
5.工件坐标系。
工件坐标系用于确定工件的位置,由工件原点和坐标位置组成。工件坐标系可采用三种方法确定:点X1与点X2连接形成X轴,点Y1向X轴的垂直线为Y轴,Z轴方向由右手定则确定。
6.用户坐标系。
用户坐标系是用户定制每个工作空间的直角坐标系,用于位置寄存器的教学和执行、位置补偿指令的执行等。大地坐标系将在没有定义的情况下取代坐标系。
用户坐标系的优点:当机器人运行轨迹相同,工件位置不同,只需要更新用户坐标系即可,无需重新编程。
机器人沿着所指定的用户坐标系各轴平行移动。在关节坐标系以外的其他坐标系中,均可只改变工具姿态而不改变工具尖端点(控制点)位置,这叫做控制点不变动作。0号用户坐标系为基准用户坐标系,不可设定、修改,该坐标系和直角坐标系相同。用户坐标1-49号用户可根据需要设定。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









