









在实习过程中使用阻塞队列对while + sleep 轮询机制进行了改造,提升了发送接收的效率,这里做一点点总结。
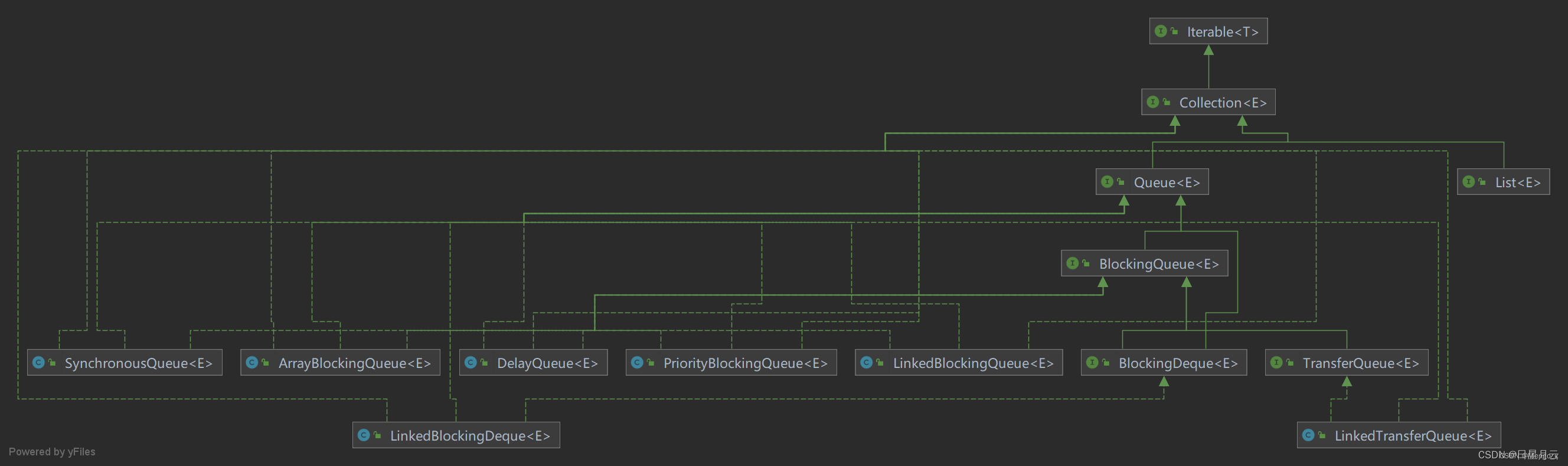
自从Java 1.5之后,在java.util.concurrent包下提供了若干个阻塞队列,BlcokingQueue继承了Queue接口,是线程安全的。阻塞功能使得生产者和消费者两端的能力得以平衡,当阻塞队列是空时,从队列中获取元素的操作将会被阻塞。当阻塞队列是满时,往队列里添加元素的操作将会被阻塞。
等待唤醒机制 condition/await/singal 和阻塞队列的关系将在第四部分介绍。
比较和交换(Compare And Swap,CAS) 将在文章第五部分介绍。
用过 Golang 的会发现,这怎么这么像 channel?之后应该会写写关于这俩的博客。
文章目录
#1 阻塞队列的种类
ArrayBlockingQueue:基于数组实现的一个阻塞队列,在创建ArrayBlockingQueue对象时必须制定容量大小。并且可以指定公平性与非公平性,默认情况下为非公平的,即不保证等待时间最长的队列最优先能够访问队列。LinkedBlockingQueue:基于链表实现的一个阻塞队列,在创建LinkedBlockingQueue对象时如果不指定容量大小,则默认大小为Integer.MAX_VALUE,可被看作无界队列。PriorityBlockingQueue:以上2种队列都是先进先出队列,而PriorityBlockingQueue 会按照元素的优先级对元素进行排序,每次出队的元素都是优先级最高的元素。此阻塞队列为无界阻塞队列,即容量没有上限。DelayQueue:基于PriorityQueue,一种延时阻塞队列,也有比较排序能力。DelayQueue中的元素只有当其指定的延迟时间到了,才能够从队列中获取到该元素。DelayQueue也是一个无界队列,因此往队列中插入数据的操作(生产者)永远不会被阻塞,而只有获取数据的操作(消费者)才会被阻塞。SynchronousQueue:它的容量为0(不是1),所以没有地方来暂存元素,导致每次取数据都要先阻塞,直到有数据放入;同理,每次放数据的时候也会阻塞,直到有消费者来取。它不需要去持有元素,它做的就是直接传递。LinkedTransferQueue:是一个由链表结构组成的无界阻塞TransferQueue队列,多了tryTransfer(可以设置等待时间)和transfer(等待有消费者后这个方法才会执行下去)方法。可以算是 LinkedBolckingQueue 和 SynchronousQueue 和合体。基于CAS无锁算法实现,性能理论高一点。
Queue接口下面还有一种非阻塞队列ConcurrentLickedQueue,不会使线程阻塞,而是使用CAS非阻塞算法+不停重试来实现线程安全的。
#2 常用方法
队列主要方法
对于非阻塞队列,一般情况下建议使用offer、poll和peek三个方法,因为使用offer、poll和peek三个方法可以通过返回值判断操作成功与否,而使用add和remove方法却不能达到这样的效果。注意,非阻塞队列中的方法都没有进行同步措施。
add(E e):将元素e插入到队列末尾,如果插入成功,则返回true;如果插入失败(即队列已满),则会抛出异常;remove():移除队首元素,若移除成功,则返回true;如果移除失败(队列为空),则会抛出异常;element():返回队列的头节点,但是不会删除这个元素。当队列为空时同样会报NoSuchElementException的错误;offer(E e):将元素e插入到队列末尾,如果插入成功,则返回true;如果插入失败(即队列已满),则返回false;poll():移除并获取队首元素,若成功,则返回队首元素;否则返回null;peek():获取队首元素,若成功,则返回队首元素;否则返回null
阻塞队列主要方法
上面列举的5个方法在阻塞队列中都存在,但是要注意这5个方法在阻塞队列中都进行了同步措施。
put(E e):阻塞方法,向队尾存入元素,如果队列满,则等待;take():阻塞方法,从队首取元素,如果队列为空,则等待;offer(E e,long timeout, TimeUnit unit):向队尾存入元素,如果队列满,则等待一定的时间,当时间期限达到时,如果还没有插入成功,则返回false;否则返回true;poll(long timeout, TimeUnit unit):从队首取元素,如果队列空,则等待一定的时间,当时间期限达到时,如果取到,则返回null;否则返回取得的元素;
| 操作类型 | 抛出异常 | 阻塞线程 | 有返回值 | 超时返回 |
|---|---|---|---|---|
| 存入 | add | put | offer | offer(E e, long timeout, TimeUnit unit) |
| 取出 | remove | take | poll | poll(long timeout, TimeUnit unit) |
#3 阻塞队列的原理 - 以 ArrayBlockingQueue 为例
ArrayBlockingQueue中用来存储元素的实际上是一个数组,takeIndex和putIndex分别表示队首元素和队尾元素的下标,count表示队列中元素的个数。lock是一个可重入锁,notEmpty和notFull是等待条件。
读操作和写操作都需要先获取到 ReentrantLock 独占锁才能进行下一步操作。进行读操作时如果队列为空,线程就会进入到读线程专属的notEmpty的 Condition 的队列中去排队,等待写线程写入新的元素;同理队列已满,这个时候写操作的线程进入到写线程专属的notFull队列中去排队,等待读线程将队列元素移除并腾出空间。
public class ArrayBlockingQueue<E> extends AbstractQueue<E>
implements BlockingQueue<E>, java.io.Serializable {
private static final long serialVersionUID = -817911632652898426L;
/** 用于存放元素的数组 The queued items */
private final E[] items;
/** 下一次读取的位置 items index for next take, poll or remove */
private int takeIndex;
/** 下一次写入的位置 items index for next put, offer, or add. */
private int putIndex;
/** 队列中元素的数量 Number of items in the queue */
private int count;
/*
* Concurrency control uses the classic two-condition algorithm
* found in any textbook.
*/
/** Main lock guarding all access */
private final ReentrantLock lock;
/** Condition for waiting takes */
private final Condition notEmpty;
/** Condition for waiting puts */
private final Condition notFull;
}
put() 方法:
在put方法中,首先用checkNotNull方法检查插入的元素是不是null,如果不是 null 会用Reentrantlock上锁,并且使用的上锁方法是lock.lockInterruptibly()。这个方法在获取锁的同时是可以响应中断的,这也正是我们的阻塞队列调用put方法时,在尝试获取锁但还没拿到锁的期间可以响应中断的底层原因。
紧接着在while循环中,它会检查当前队列是不是已经满了,也就是count的长度是否等于数组长度。如果等于代表已经满了,于是我们便会进行等待,直到有空余的时候,我们才会执行下一步操作,调用enqueue方法让元素进入队列,最后用unlock方法解锁。
public void put(E e) throws InterruptedException {
//判断添加元素e是否为空,为空会抛出异常
checkNotNull(e);
//获取锁
final ReentrantLock lock = this.lock;
//加锁
lock.lockInterruptibly();
try {
//队列已满,线程等待
while (count == items.length)
notFull.await();
//入队方法 signal()藏在enqueue(e)方法里了
enqueue(e);
} finally {
//释放锁
lock.unlock();
}
}
private void enqueue(E x) {
// assert lock.getHoldCount() == 1;
// assert items[putIndex] == null;
final Object[] items = this.items;
//插入数据
items[putIndex] = x;
if (++putIndex == items.length)
putIndex = 0;
count++;
//通知消费者线程,当前队列中有数据可供消费
notEmpty.signal();
}
take() 方法
跟put方法实现很类似,只不过put方法等待的是notFull信号,而take方法等待的是notEmpty信号。
//从队列中取出数据
public E take() throws InterruptedException {
//获取锁
final ReentrantLock lock = this.lock;
//加锁
lock.lockInterruptibly();
try {
//当队列中无数据,删除线程阻塞等待
while (count == 0)
notEmpty.await();
//有数据,执行队头元素出队操作
return dequeue();
} finally {
//释放锁
lock.unlock();
}
}
private E dequeue() {
final Object[] items = this.items;
@SuppressWarnings("unchecked")
E x = (E) items[takeIndex]; //取出takeIndex位置的元素
items[takeIndex] = null;
if (++takeIndex == items.length)
takeIndex = 0; //设计的精髓: 环形数组,takeIndex 指针到数组尽头了,返回头部
count--;
if (itrs != null)
itrs.elementDequeued();
//notFull条件队列转同步队列,准备唤醒生产者线程,此时队列有空位
notFull.signal();
return x;
}
非阻塞队列ConcurrentLinkedQueue
顺便看看使用CAS非阻塞算法+不停重试来实现线程安全的这个队列。
ConcurrentLinkedQueue是一种非阻塞的线程安全队列,与阻塞队列LinkedBlockingQueue相对应,同样也是使用链表实现的FIFO队列,但不同的是它没有使用任何锁机制,而是用CAS来实现线程安全。
public boolean offer(E e) {
// 检查e是不是null,是的话抛出NullPointerException异常。
checkNotNull(e);
// 创建新的节点
final Node<E> newNode = new Node<E>(e);
// 将“新的节点”添加到链表的末尾。
for (Node<E> t = tail, p = t;;) {
Node<E> q = p.next;
// 情况1:q为空,p是尾节点插入
if (q == null) {
// CAS操作:如果“p的下一个节点为null”(即p为尾节点),则设置p的下一个节点为newNode。
// 如果该CAS操作成功的话,则比较“p和t”(若p不等于t,则设置newNode为新的尾节点),然后返回true。
// 如果该CAS操作失败,这意味着“其它线程对尾节点进行了修改”,则重新循环。
if (p.casNext(null, newNode)) {
if (p != t) // hop two nodes at a time
casTail(t, newNode); // Failure is OK.
return true;
}
}
// 情况2:p和q相等
else if (p == q)
p = (t != (t = tail)) ? t : head;
// 情况3:其它
else
p = (p != t && t != (t = tail)) ? t : q;
}
}
非阻塞队列ConcurrentLinkedQueue主要流程就是在判空以后,会进入一个大循环中,p.casNext()方法,这个方法正是利用了CAS来操作的,这个死循环去配合CAS其实就是我们平时说的乐观锁的思想。
#4 等待唤醒机制 wait/notify/notifyAll、condition/await/singal
从上一部分可以发现,阻塞队列 = 等待唤醒机制 + 队列,例如 ArrayBlockingQueue 使用了 ReentrantLock + Condition 和一个列表队列实现。这里就顺便说说 Java 中的阻塞唤醒机制。此部分参考这篇好文。
轮询
生产者和消费者线程各自使用while循环,每隔片刻就去判断Queue的状态,队列为空时生产者才可插入数据,队列不为空时消费者才能取出数据,否则一律sleep等待。
轮询最简单但是也最不优雅。
- sleep 时不会释放线程拥有的锁。
- 轮询的方式太耗费CPU资源:如果线程过多,比如几百上千个线程同时在那轮询,会给CPU带来较大负担。
- 无法保证原子性:如果生产者的操作非原子性,消费者极可能获取到脏数据。
wait/notify/notifyAll
等待唤醒机制底层通过维护线程队列的方式,避免了过多线程同时自旋造成的CPU资源浪费,颇有点“用空间换时间”的味道。
当一个生产者线程无法插入数据时,就让它在队列里休眠(阻塞),此时生产者线程会释放CPU资源,等到消费者抢到CPU执行权并取出数据后,再由消费者唤醒生产者继续生产。
- 用
synchronized保证原子性 wait和notify实现等待唤醒
// 线程consumer
synchronize(obj){
obj.wait();//没东西了,等待
}
// 线程producer
synchronize(obj){
obj.notify();//有东西了,唤醒
}
在synchronized机制下,所有等待的线程都在同一个队列里,而notify又恰巧是随机唤醒线程(也就是说,有可能生产者唤醒生产者)。
一般建议是改用notifyAll,把所有线程都唤醒,然后大家一起参与执行权的竞争。
- 如果线程调用了对象的 wait()方法,那么线程便会处于该对象的等待池中,等待池中的线程不会去竞争该对象的锁。
- 当有线程调用了对象的 notifyAll()方法(唤醒所有 wait 线程)或 notify()方法(只随机唤醒一个 wait 线程),被唤醒的的线程便会进入该对象的锁池中,锁池中的线程会去竞争该对象锁。也就是说,调用了notify后只要一个线程会由等待池进入锁池,而notifyAll会将该对象等待池内的所有线程移动到锁池中,等待锁竞争
- 优先级高的线程竞争到对象锁的概率大,假若某线程没有竞争到该对象锁,它还会留在锁池中,唯有线程再次调用 wait()方法,它才会重新回到等待池中。而竞争到对象锁的线程则继续往下执行,直到执行完了 synchronized 代码块,它会释放掉该对象锁,这时锁池中的线程会继续竞争该对象锁。
condition/await/singal
虽然 wait/notifyAll 能解决“己方唤醒己方,最终导致全部线程阻塞”的乌龙事件,但唤醒全部线程又不够精确,会造成无谓的线程竞争(实际只需要唤醒敌方线程即可)。
作为改进版,可以使用 ReentrantLock 的 Condition 替代 synchronized 的 wait/notify,以下是生产者伪代码。
// 显式锁(相对地,synchronized锁被称为隐式锁)
private final ReentrantLock lock = new ReentrantLock();
private final Condition producerCondition = lock.newCondition();
private final Condition consumerCondition = lock.newCondition();
// 队列满,生产者等待
lock.lock();
producerCondition.await();
lock.unlock();
// 提醒消费者消费
lock.lock();
consumerCondition.signal();
lock.unlock();
你可以认为lock.newCondition() 创建了一个队列,调用producerCondition.await()会把生产者线程放入生产者的等待队列中,当消费者调用producerCondition.signal() 时会唤醒从生产者的等待队列中唤醒一个生产者线程出来工作。
也就是说,ReentrantLock的Condition通过拆分线程等待队列,让线程的等待唤醒更加精确了,想唤醒哪一方就唤醒哪一方。
可以看到,上面的伪代码和前面阻塞队列的put() 方法逻辑几乎一模一样。同理,阻塞队列的 take() 方法逻辑即为消费者的逻辑。
#5 多线程安全 - CAS
补充一下这个概念。
在计算机科学中,比较和交换(Compare And Swap,CAS) 是用于实现多线程同步的原子指令。 它将内存位置的内容与给定值进行比较,只有在相同的情况下,将该内存位置的内容修改为新的给定值。
它包含 3 个参数 CAS(V,E,N)。V 表示要更新的变量(内存值),E 表示预期值(旧的),N 表示新值。当且仅当 V 值等 于 E 值时,才会将 V 的值设为 N,如果 V 值和 E 值不同,则说明已经有其他线程做了更新,则当前线程什么都不做。最后,CAS 返回当前 V 的真实值。
CAS 操作是抱着乐观的态度进行的(乐观锁),它总是认为自己可以成功完成操作。当多个线程同时 使用 CAS 操作一个变量时,只有一个会胜出,并成功更新,其余均会失败。失败的线程不会被挂起,仅是被告知失败,并且允许再次尝试,当然也允许失败的线程放弃操作。基于这样的原理, CAS 操作即使没有锁,也可以发现其他线程对当前线程的干扰,并进行恰当的处理。
独占锁是一种悲观锁,synchronized就是一种独占锁,会导致其它所有需要锁的线程挂起,等待持有锁的线程释放锁。而另一个更加有效的锁就是乐观锁。所谓乐观锁就是,每次不加锁而是假设没有冲突而去完成某项操作,如果因为冲突失败就重试,直到成功为止。乐观锁用到的机制就是CAS,Compare and Swap。
自旋: 就是不停的判断比较,看能否将值交换
CAS的三大问题:
- ABA问题:一个值原来是A,变成了B,又变成了A,那么使用CAS进行检查时会发现它的值没有发生变化,但是实际上却变化了。ABA问题的解决思路就是使用版本号,每次变量更新的时候把版本号加一,那么A-B-A 就会变成1A-2B-3A。
- 循环时间长开销大:自旋CAS如果长时间不成功,会给CPU带来非常大的执行开销。如果JVM能支持处理器提供的pause指令那么效率会有一定的提升。
- 只能保证一个共享变量的原子操作:对多个共享变量操作时,循环CAS就无法保证操作的原子性,这个时候就可以用锁。还有一个取巧的办法,就是把多个共享变量合并成一个共享变量来操作。














 2011
2011











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









