







1.3 AUTOSAR基础软件层
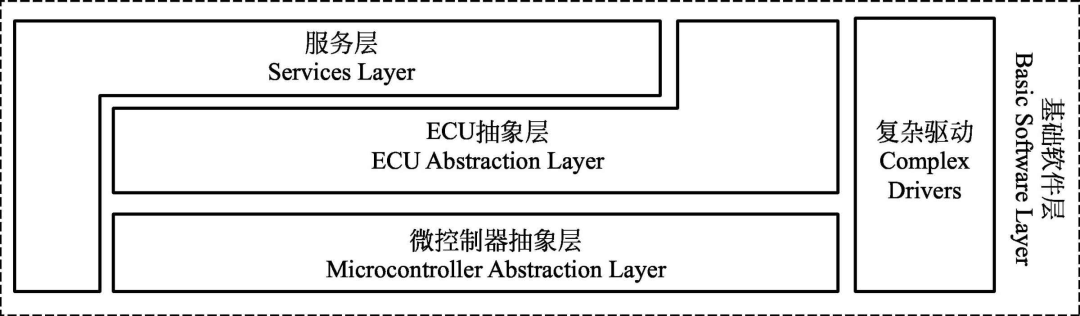
AUTOSAR的基础软件曾的结构主要由四部分组成,即微控制器抽象层(Microcontroller Abstraction Layer,MCAL),ECU抽象层(ECU Abstraction Layer),服务层(Services Layer)以及复杂驱动(Complex Drivers)。
 AUTOSAR基础软件层
AUTOSAR基础软件层
AUTOSAR基础软件层主要用于提供基础软件服务,它主要包括标准化的系统功能以及功能接口,并且由一系列的基础服务软件组成,包括系统服务(System Services)、存储服务(Memory Services)等。
基础软件曾的组件及其功能对应如下:
- 系统(System):提供标准化的规定(针对操作系统、定时器以及错误存储器)、ECU特定的服务(ECU状态管理、看门狗管理)和库函数;
- 内存(Memory):对内部和外部的内存(非易失性存储器)的访问入口进行标准化;
- 通信(Communication):对汽车网络系统,ECU通信系统以及ECU内部软件的访问入口进行标准化;
- 输入输出(I/O):对传感器、执行器以及ECU外设的访问入口进行标准化。
同时,基础软件层模块按照类型可以分为驱动模块、接口模块以及管理器;
- 驱动模块(Driver):包含了控制和使用内部或者外部器件的功能,分为内部驱动(单片机内部)和外部驱动(单片机外部的ECU硬件)。
- 接口模块(Interface):提供一个通用的接口函数(API)函数来访问一种特定的器件类型...
- 处理模块(Handler):处理模块是一个专用的接口,它控制着一个或者多个客户端对一个或者多个驱动程序的并行、多重以及异步等访问。也就是说它起着缓冲、队列、仲裁以及多路复用的功能。如SPIHandlerDriver,ADC Driver等。
- 管理器(Manager):管理器为多重的客户端提供特定的服务。
1.3.1 微控制器抽象层(MCAL)
位于AUTOSAR分层模型中的最底层。包含微控制器驱动、存储器驱动、通信驱动和I/O驱动四个部分。
- 微控制器驱动:由通用定时器驱动(General Purpose Driver, GPT Driver)、看门狗驱动(Watchdog Driver,WDG Driver)、微控制器单元驱动(Microcontroller Unit Driver, MCU Driver)和内核测试(Core Test)四个部分;
- 存储器驱动:内部EEPROM驱动,内部FLASH驱动、RAM测试、FLASH测试;
- 通信驱动:以太网驱动、FlexRay驱动、CAN驱动、LIN驱动、SPI驱动;
- I/O驱动:PORT驱动、DIO驱动、ADC驱动、PWM驱动、ICU驱动、OCU驱动
1.3.2 ECU抽象层
ECU抽象层负责提供统一的访问接口,实现对通信、内存或者I/O的访问,从而无需考虑这些资源是由微处理器提供的还是外部设备提供的。外部设备的驱动就处于这一层。
ECU抽象层主要包括板载设备抽象(Onboard Device Abstraction)、存储器硬件抽象(Memory Hardware Abstraction)、通信硬件抽象(Communication Hardware Abstraction)和IO抽象(IO Hardware Abstraction)四个部分















 1084
1084











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









