







 本文介绍了极线几何的基本概念,特别是EPI(极线平面图像)在平行相机或连续帧间的应用。作者通过实例和直观解释,说明了如何通过EPI理解不同相机视角下的物体深度变化。
本文介绍了极线几何的基本概念,特别是EPI(极线平面图像)在平行相机或连续帧间的应用。作者通过实例和直观解释,说明了如何通过EPI理解不同相机视角下的物体深度变化。
极线几何(Epipolar Geometry)
一张很不错的图来解释极线:
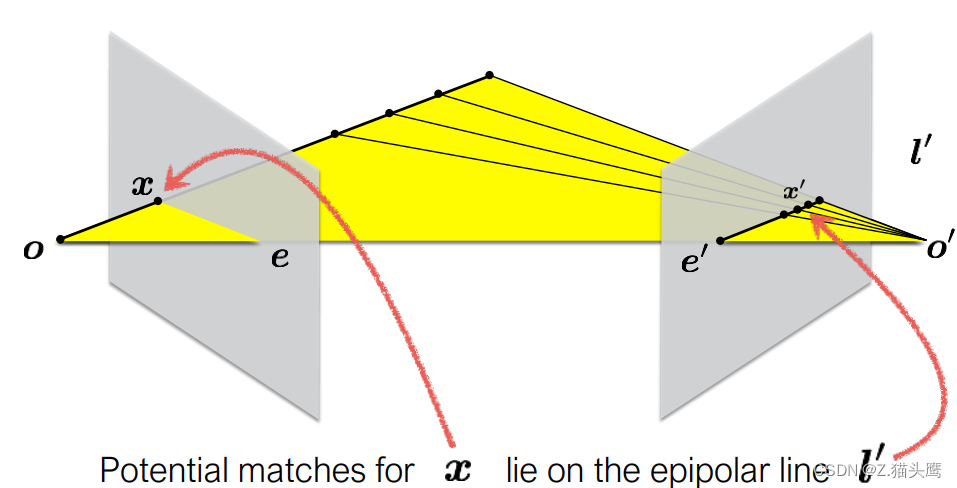
两个成像平面l、l’,o和o’是对应的相机位置,e和e’是两相机连线在成像平面上的交点。
左边l上的点x对应3D空间里ox射线上某一点,由于ox射线在右边l’上的投影对应e’x’射线(是射线不是线段),因此点x一定能匹配上e’x’上的一点。
对于l面上的点x来说,e’x’就是它在l’上的极线。反之亦然,在l’上的点x’也会对应l上的一条线。
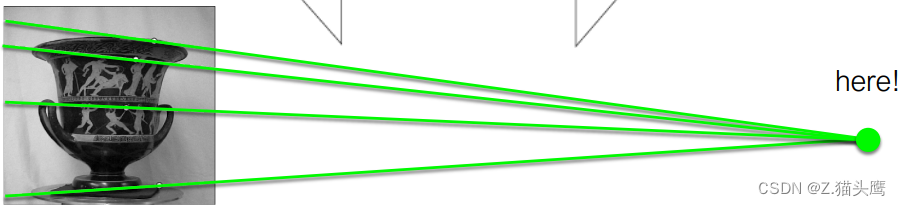
对于两个有夹角的像面而言,不同极线非平行,交汇于点e’,e’可能在成像平面中也可能不在:
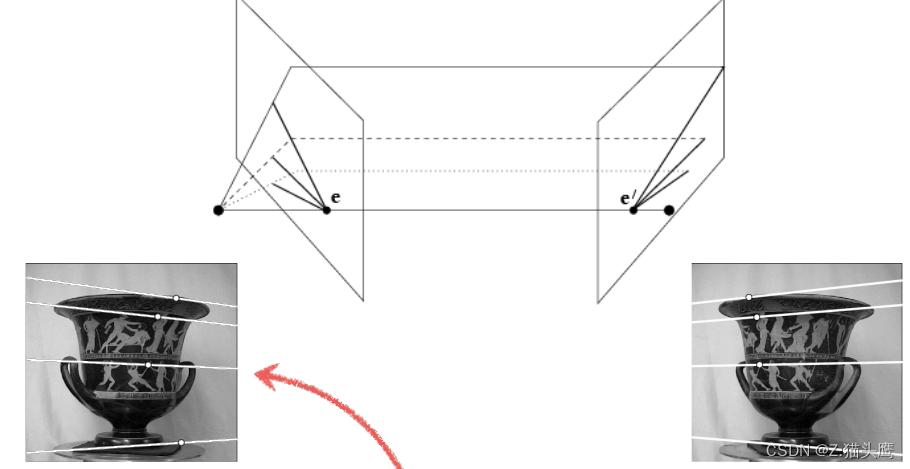
比如上图这两个花瓶,e就在图像外
平行相机的情况
对于两个(or多个)平行相机(平行像面),或者一段平行移动视频中的两帧(or多帧),就变成了下图的情况
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









