







导读
MIT矩阵分析课程之后的的二篇笔记。
置换矩阵
在这篇Blog https://blog.csdn.net/LLLLLLLLLLLLLLYYYYYY/article/details/103752865 中对MIT线性代数课程中A=LU内容做了记录。这里需要做一些补充。上述Blog中的矩阵A中主元是非零的,即不能进行行变换,但是在现实当中遇到的矩阵主元常常回到为零的情况,在软件中,如Matlab中,为了数值精确,具有很小数值的主元也是不允许的。所以更为普遍的A=LU应该写为PA=LU,其中P为置换矩阵(Permutation matrix),用于矩阵行变换,PA表示得到所有主元为非零的矩阵。置换矩阵有以下几种有趣的性质。
-
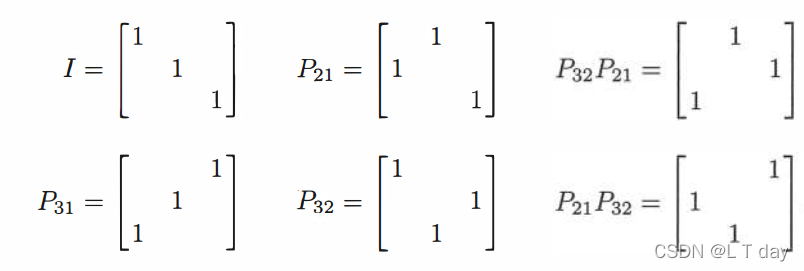
对于一个n阶方阵,它对应的置换矩阵有 n! 个。
如一个三阶方阵,它对应的置换矩阵如下所示(0未标明):
-
PT=P-1
转置矩阵
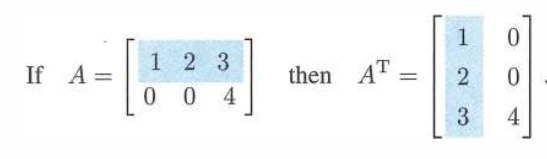
有矩阵A,对该矩阵进行转置(Tanspose)得到矩阵AT,两者的关系用矩阵元素表示为 (AT)ij=Aji ,即矩阵 AT i行j列的元素为转置前矩阵 A j行i列的元素,如下图所示:
提到转置矩阵就必须提及对称矩阵(Symmetric Matrix),见下图示例:

对称矩阵S有以下性质:ST=S,即
对称矩阵往往很容易构建,如矩阵 A 与其的转置矩阵相乘(ATA)得到的矩阵即为对称矩阵,可以通过一下证明得到:(ATA)T=AT(AT)T=ATA。
向量空间与子空间
向量空间(Spaces of Vectors) Rn 由所有具有n维的实数向量构成,如果n为2,即为2维向量空间,可以使用直角坐标系直观表示。在向量空间 Rn 中具有如下性质:将任意向量相加或者乘以一个标量(即i. v+w ii. cv),也就是任意向量的线性组合,它们的结果也应该在这个向量空间中。当然具有该性质的向量空间也不止 Rn 如最简单的仅包含一个零向量的向量空间,记为 Z ;向量元素为函数的向量空间,记为 F ;所有2×2的方阵,记为 M ;当然还有向量元素为复数的复数向量空间,记为 C 。要满足上述性质,上述提到的向量空间中一部分向量也可以单独构成向量空间,他称为上述向量空间的向量子空间(Subspaces),不过这些向量子空间必须要包含有零向量。如三维向量空间R3(3-dimensional space)的子空间为:
- R3
- 所有过原点(0,0,0)的直线L 。
- 所有过原点(0,0,0)的平面P 。
- 仅包含零向量的向量空间Z 。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









