







1.概述
灰度内插法主要针对在图像处理过程中,小数像素坐标取值问题,有最邻近元,双线性内插,三次内插三种,精度复杂度依次增加,在此记录
2.最邻近元法

选择待求点四邻像素中最近的灰度为内插灰度,但该项会造成不连续
degree(a,b)=degree(round(a),round(b))
3.双线性内插

即使用相邻四像素构成两条直线从而获得位置,如图所示,假定四周点为(i,j),(i+1,j),(i,j+1),(i+1,j+1),所求点为(i+u,j+v)
- 对于黄点位置(i,j+v)可以表示为 f ( i , j + v ) = f ( i , j ) + v ( f ( i , j + 1 ) − f ( i , j ) ) f(i,j+v)=f(i,j)+v(f(i,j+1)-f(i,j)) f(i,j+v)=f(i,j)+v(f(i,j+1)−f(i,j))
- 对于蓝点位置(i+1,j+v)可以表示为 f ( i + 1 , j + v ) = f ( i + 1 , j ) + v ( f ( i + 1 , j + 1 ) − f ( i + 1 , j ) ) f(i+1,j+v)=f(i+1,j)+v(f(i+1,j+1)-f(i+1,j)) f(i+1,j+v)=f(i+1,j)+v(f(i+1,j+1)−f(i+1,j))
- 因此所求点(红点)位置可以表示为
f
(
i
+
u
,
j
+
v
)
=
f
(
i
,
j
+
v
)
+
u
(
f
(
i
+
1
,
j
+
v
)
−
f
(
i
,
j
+
v
)
)
=
(
1
−
u
)
(
1
−
v
)
f
(
i
,
j
)
+
(
1
−
u
)
v
f
(
i
,
j
+
1
)
+
(
1
−
v
)
u
f
(
i
+
1
,
j
)
+
u
v
f
(
i
+
1
,
j
+
1
)
f(i+u,j+v)=f(i,j+v)+u(f(i+1,j+v)-f(i,j+v))=(1-u)(1-v)f(i,j)+(1-u)vf(i,j+1)+(1-v)uf(i+1,j)+uvf(i+1,j+1)
f(i+u,j+v)=f(i,j+v)+u(f(i+1,j+v)−f(i,j+v))=(1−u)(1−v)f(i,j)+(1−u)vf(i,j+1)+(1−v)uf(i+1,j)+uvf(i+1,j+1)
该方法计算量较大,结果较好,具有低通滤波性,图像轮廓有一定模糊。
3.三次内插法
即通过三次多项式拟合灰度变化,通过取周围点灰度获得插值
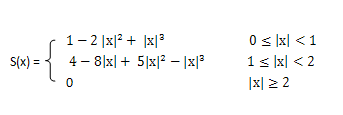

- 待求点灰度内插值为 f ( i + u , j + v ) = A B C f(i+u,j+v)=ABC f(i+u,j+v)=ABC,假设取n*n个点求值
- A=n维S(m)矩阵,m为所取n个点到所求点的纵坐标差值绝对值
- B=灰度矩阵,大小为n*n
- C=n维S(m)矩阵的转置,m为所取n个点到所求点的横坐标差值绝对值
由此获得的精度为最高,但计算最为复杂















 1792
1792











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









