







目录
SG90 舵机模块驱动
开发环境
立创天空星开发板、主控芯片为STM32F407VxT6、SG90舵机模块
实物图片

主要规格参数
驱动电压: 3V~7.2V 工作扭矩: 1.6KG/CM 控制方式: PWM 转动角度: 180度
相关说明
我们在选择舵机时,首先需要分清楚你需要的舵机是可以转180度,还是360度。360度的舵机是无法控制角度的,只可以控制旋转速度。
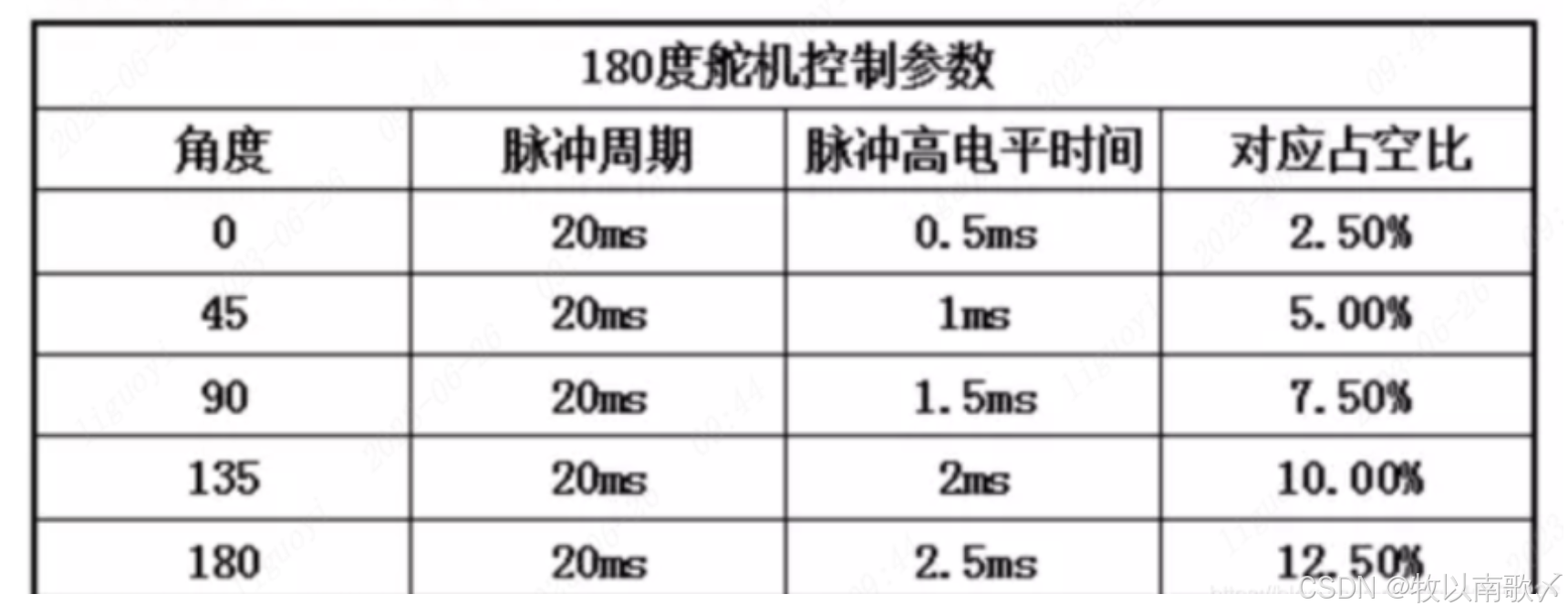
180度的舵机可以控制旋转角度、有角度定位。上电后会自动复位到0度。通过配置不同占空比的PWM信号可以控制舵机转动的角度。通常的脉冲参数如下:
360度的舵机不可以控制角度、只能顺时针旋转、逆时针旋转、停止、调节转速,无角度定位。上电后不会自动复位到0度。通过设置一定参数的脉冲信号可以控制它的旋转。通常的脉冲参数如下:

注意: SG90的舵机转速不是很快,一般为0.22/60度或0.18/60度,所以假如更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。
引脚连接
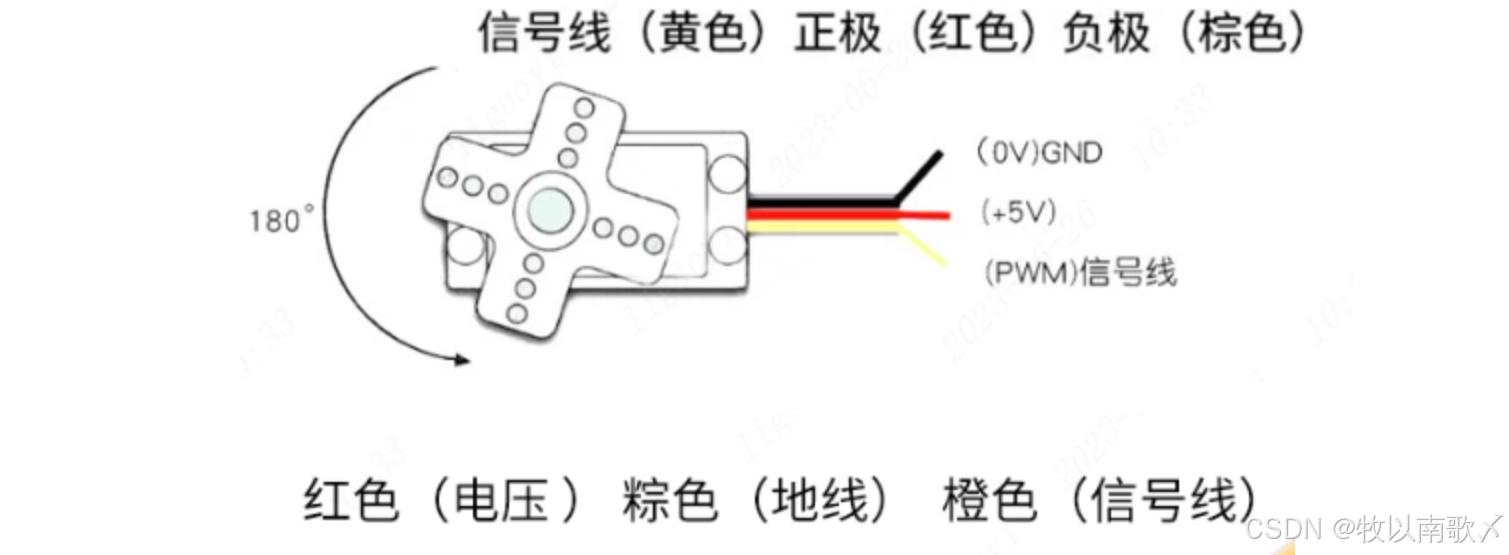
在这里,SG90舵机模块与STM32的连接如下: SG90舵机 STM32引脚 红色线 5V 棕色线 GND 黄色线 PA6(TIM3_CH1)
SG90舵机驱动
sg90舵机驱动模块的驱动代码分为sg90.h头文件和sg90.c文件。
sg90.h头文件如下:
#ifndef _SG90_H
#define _SG90_H
#include "stm32f4xx.h"
#define RCC_SIG RCC_AHB1Periph_GPIOA
#define PORT_SIG GPIOA
#define GPIO_SIG GPIO_Pin_6
#define GPIO_SIG_SOURCE GPIO_PinSource6
#define AF_SIG GPIO_AF_TIM3
#define RCC_SIG_TIMER RCC_APB1Periph_TIM3
#define SIG_TIMER TIM3 //定时器3
void SG90_Init(void);
void Set_Servo_Angle(unsigned int angle);
unsigned int Get_Servo_Angle(void);
void TIM3_PWM_Init_AllChannel(void);
#endifsg90.c内容如下:
#include "sg90.h"
unsigned int Servo_Angle = 0;//舵机角度
/******************************************************************
* 函 数 名 称:SG90_Init
* 函 数 说 明:PWM配置
* 函 数 形 参: pre定时器时钟预分频值 per周期
* 函 数 返 回:无
* 备 注:PWM频率=84 000 000 /( (pre+1) * (per+1) )
配置占空比 范围 0 ~ (per-1)
// t = 0.5ms——————-舵机会转动 0 °
// t = 1.0ms——————-舵机会转动 45°
// t = 1.5ms——————-舵机会转动 90°
// t = 2.0ms——————-舵机会转动 135°
// t = 2.5ms——————-舵机会转动180°
// 此处以90度为例,PWM周期为20ms,所以占空比就应该为1.5ms/20ms = 7.5%
******************************************************************/
void SG90_Init(void)
{
/* 配置定时器参数 */
// 频率f =系统时钟 / ( (prescaler+1) * (period+1) )
// 频率f = 84,000,000/ (8400 * 200) = 50hz
// 周期T = 1/f = 1/50 = 0.02S = 20ms
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_SIG_TIMER, ENABLE); //使能定时器3时钟
RCC_AHB1PeriphClockCmd(RCC_SIG, ENABLE); //使能GPIO外设
//设置该引脚为复用输出功能,输出TIM3
GPIO_InitStructure.GPIO_Pin = GPIO_SIG;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(PORT_SIG, &GPIO_InitStructure);//初始化GPIO
GPIO_PinAFConfig(PORT_SIG, GPIO_SIG_SOURCE, AF_SIG); //复用
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = 200-1; //在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =8400-1; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(SIG_TIMER, &TIM_TimeBaseStructure);
//初始化TIM3 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性
TIM_OC1Init(SIG_TIMER, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
TIM_OC1PreloadConfig(SIG_TIMER, TIM_OCPreload_Enable); //使能TIM3在CCR1上的预装载寄存器
TIM_Cmd(SIG_TIMER, ENABLE); //使能TIM3
}
/******************************************************************
* 函 数 名 称:Set_Servo_Angle
* 函 数 说 明:设置角度
* 函 数 形 参:angle=要设置的角度,范围0-180
* 函 数 返 回:无
* 备 注:无
******************************************************************/
void Set_Servo_Angle(unsigned int angle)
{
if(angle > 180)
{
angle = 180; // 限制角度在0到180度之间
}
// 计算PWM占空比
// 注意:这里的200是基于TIM_Period设置为199的(200-1)
// 0.5ms对应的计数 = (0.5 / 20) * 200
// 2.5ms对应的计数 = (2.5 / 20) * 200
// 因此,角度从0到180度时,占空比应该从0.5ms到2.5ms线性变化
unsigned int ServoAngle = (unsigned int)((0.5 + (angle / 180.0) * 2.0) / 20.0 * 200);
TIM_SetCompare1(SIG_TIMER, ServoAngle);
}
/******************************************************************
* 函 数 名 称:读取当前角度
* 函 数 说 明:Get_Servo_Angle
* 函 数 形 参:无
* 函 数 返 回:当前角度
* 备 注:使用前必须确保之前使用过
void Set_Servo_Angle(unsigned int angle)
函数设置过角度
******************************************************************/
unsigned int Get_Servo_Angle(void)
{
return Servo_Angle;
}移植验证
主函数main.c示例内容如下:
#include "sg90.h"
int main(void)
{
int i = 0;
/*相关外设初始化*/
SG90_Init();
Set_Servo_Angle(180);
delay_ms(1000);
Set_Servo_Angle(0);
delay_ms(1000);
while(1)
{
Set_Servo_Angle(i++);
if( i >= 180 )
{
i = 0;
}
delay_ms(10);
}
}SG90舵机将会从0度转到180度,然后回到0度,循环该运动流程。
本文部分内容参考自立创天空星官方文档。

















 9650
9650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











