







1.打开图片
IplImage *src = cvLoadImage(图片路径,0);//opencv读取灰度图
2.创建一个新的图片容器用于存取转换后的图片,大小CvSize,深度depth,色彩nChannels需要与原图片一致
IplImage *desc;
CvSize sz;//图像大小
if(src)
{
sz.width = src->width*1;
sz.height = src->height*1;
desc = cvCreateImage(sz,src->depth,src->nChannels);
//cvResize(src,desc,CV_INTER_CUBIC);//图像大小变换,用于将src图片缩小,我就不做缩小了
}
3.图像黑白二值化,用于筛选一定颜色深度的部分
第一个参数是输入图像,第二个是输出图像,第三个是方式。
cvThreshold( desc, dst_bw ,75, 255, CV_THRESH_BINARY ); //取阀值为50把图像转为二值图像
4.寻找轮廓
cvFindContours是寻找轮廓方法,将寻找的轮廓放入stor容器,cont是第一个轮廓的指针。后面的是序列头大小、提取模式、逼近方法、偏移量,照抄就可以了,出现问题了就阅读手册。
CvMemStorage *stor = cvCreateMemStorage(0);
CvSeq *cont = cvCreateSeq(CV_SEQ_ELTYPE_POINT,sizeof(CvSeq),sizeof(CvPoint),stor);
int Number_Object = cvFindContours(dst_bw,stor,&cont,sizeof(CvContour),CV_CHAIN_APPROX_NONE,
CV_CHAIN_APPROX_SIMPLE,cvPoint(0,0));
5.在画轮廓前先把像素变成白色的,这样我们看到的是一张画圈的白纸,轮廓显示得更直白
IplImage* dst_contours = cvCreateImage(sz,src->depth,src->nChannels);
cvThreshold(dst_contours,dst_contours,0,255,CV_THRESH_BINARY);
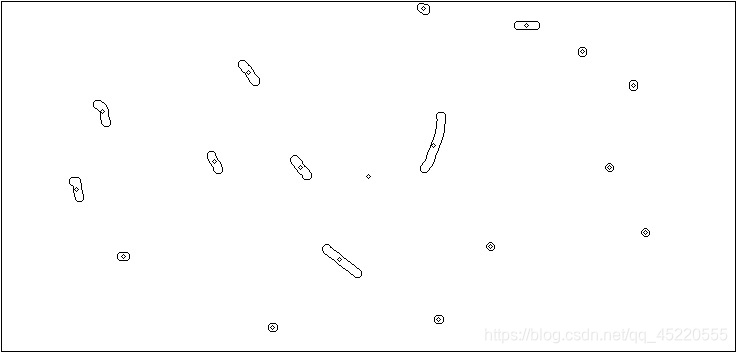
6.描绘轮廓并且找中心点
这个中心点找的,我感觉并不是很好,从我的眼力观察来看。
点p为中心点,可以输出,点的像素坐标是正确的。
//描绘轮廓
for(;cont;cont = cont->h_next)
{
cvDrawContours(dst_contours,cont,CV_RGB(255,0,0),CV_RGB(255,0,0),0,1,8,cvPoint(0,0));
GetContourCenter(cont,p);
cvCircle(dst_contours,p, 2, cvScalar(0, 255, 0), 1, 8, 0);
cvDrawContours(dst_contours,cont, CV_RGB(255, 0, 0), CV_RGB(0, 0, 0), -1, 1);
}
//抓取轮廓中心
void Widget::GetContourCenter(CvSeq *contour, CvPoint &p)
{
//重心法抓中心点
int contourlength = contour->total;
CvPoint *pt = 0;
double avg_px = 0, avg_py = 0;
for (int i = 0; i < contourlength; i++)
{
pt = CV_GET_SEQ_ELEM(CvPoint, contour, i);
avg_px += pt->x;
avg_py += pt->y;
}
p.x = avg_px / contourlength;
p.y = avg_py / contourlength;
}
处理前

处理后
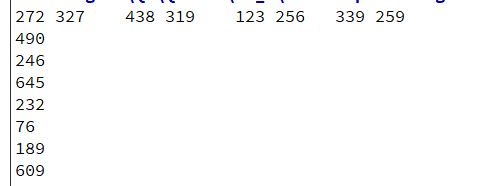
中心点像素坐标,左上角为(0,0),从图片左下角的点开始检测,从左到右,从下到上的顺序输出所有点的坐标。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









