









一、前期工作
- 固件库获取:链接

二、新建工程
1、新建文件夹用来存放工程,文件夹目录如下:
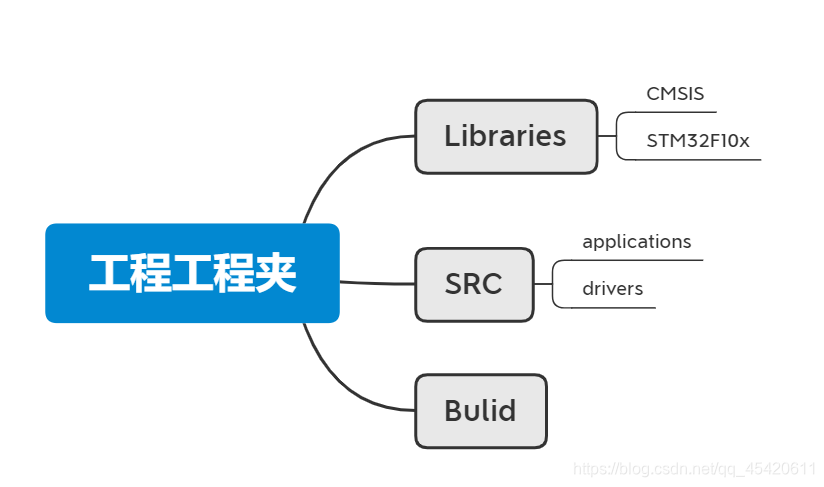
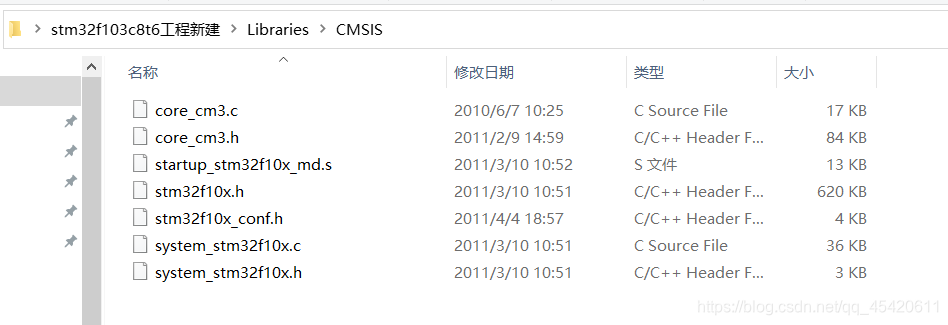
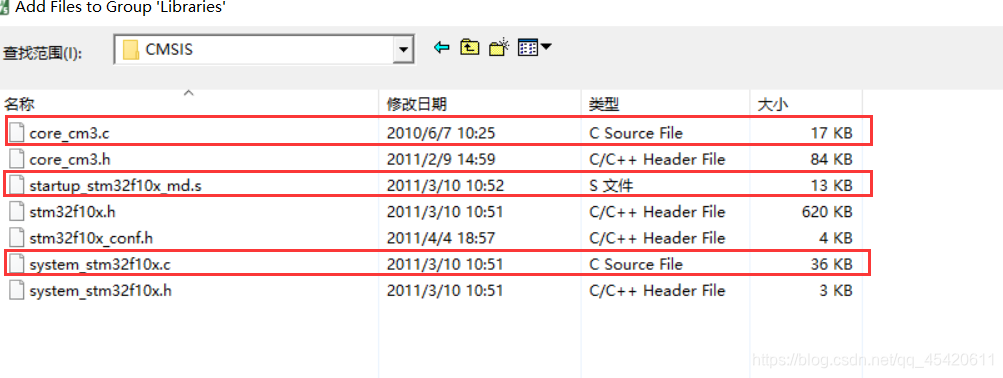
- CMSIS文件夹:存放ARM Cortex微控制器软件接口等之类的文件,解压打开固件库,存放下面7个文件。
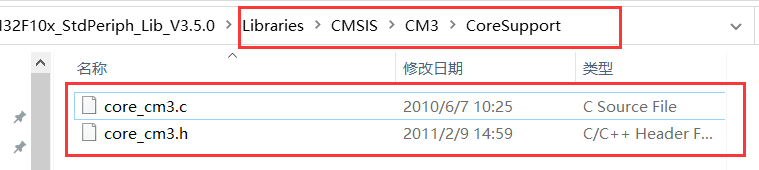


结果如下:
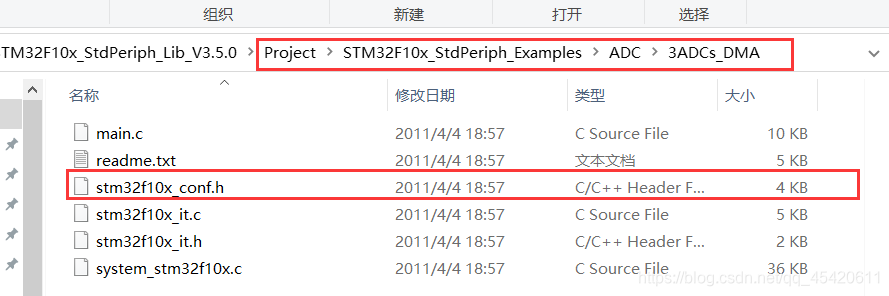
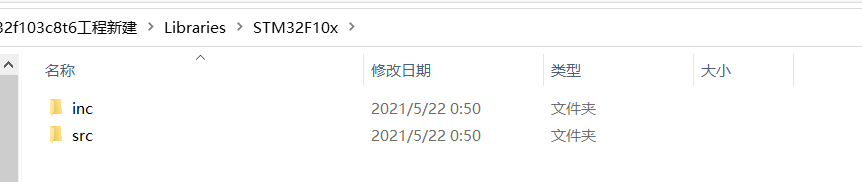
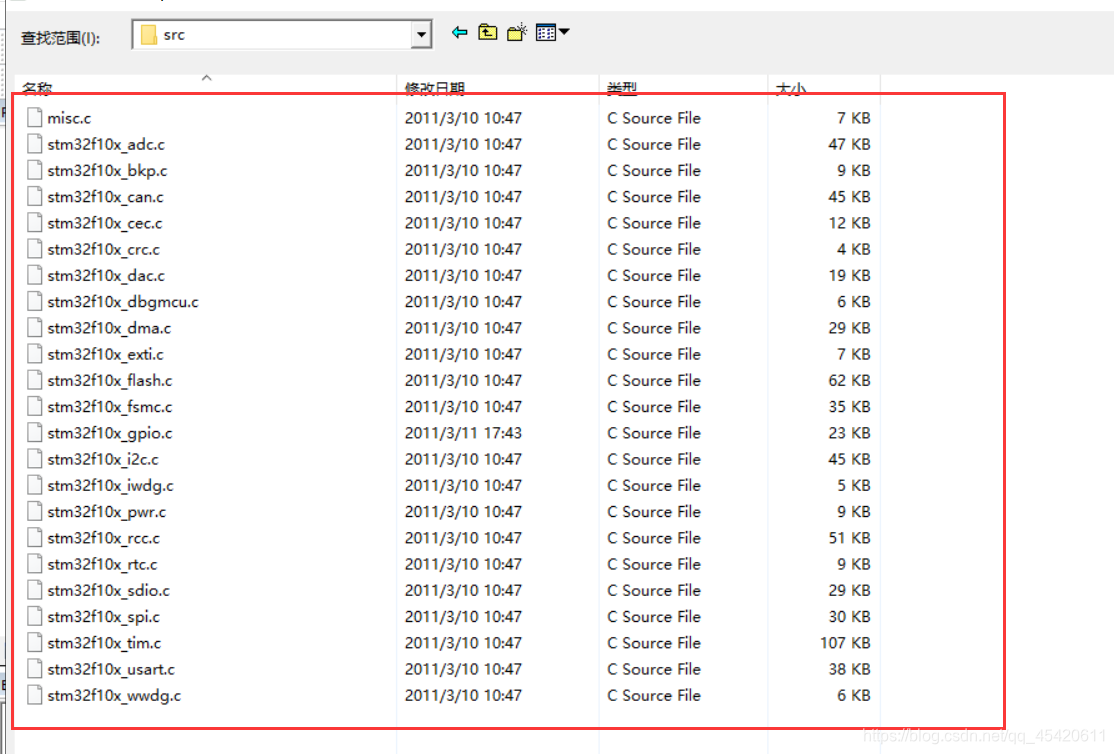
- STM32F10x文件夹:存放标准库的源文件和头文件,打开固件库,复制这两个文件夹至STM32F10x文件夹处
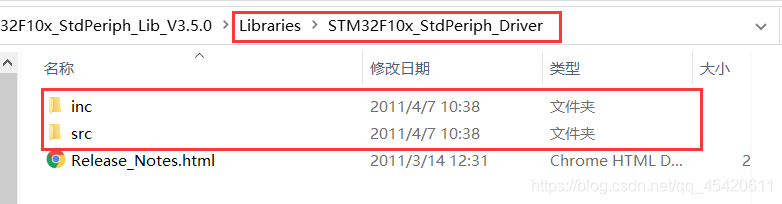
结果如下:
- SRC文件夹:用来存放用户编写的代码:我的习惯是新建两个文件夹:drivers和applications;drivers用来存放驱动层代码,applications用来存放应用层代码。
- Bulid文件夹:用来存放编译后的文件
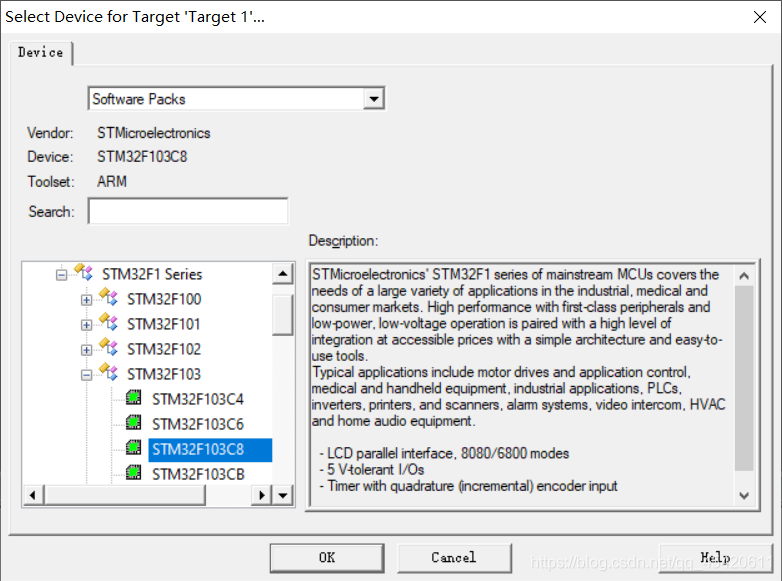
2、打开keil5新建工程,型号选C8T6
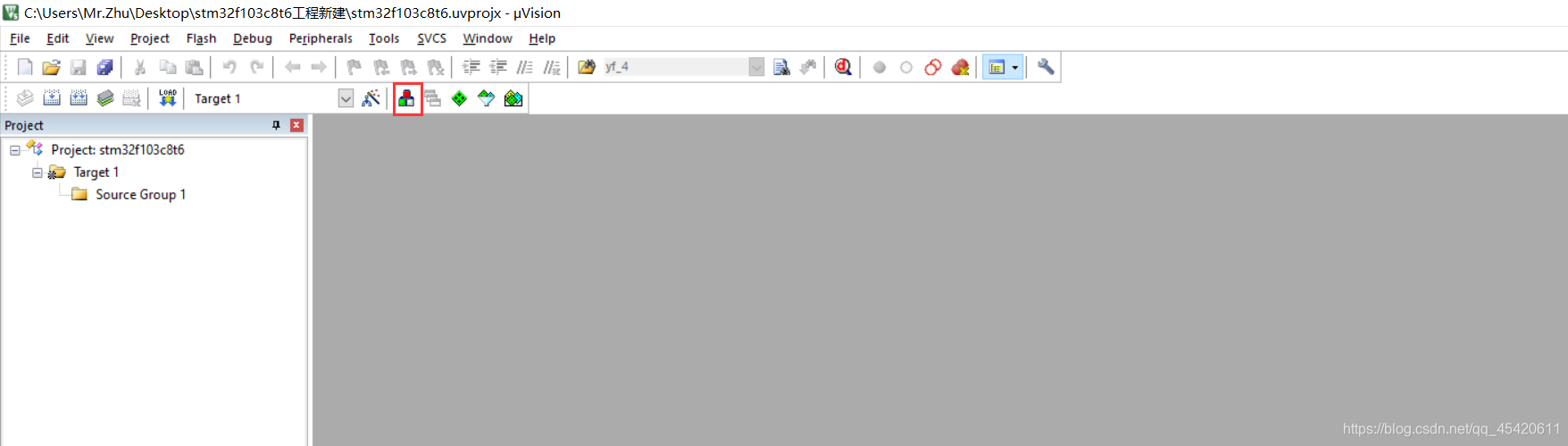
新建后,点击三色块用来添加工程目录。

在Libraries目录中添加以下文件
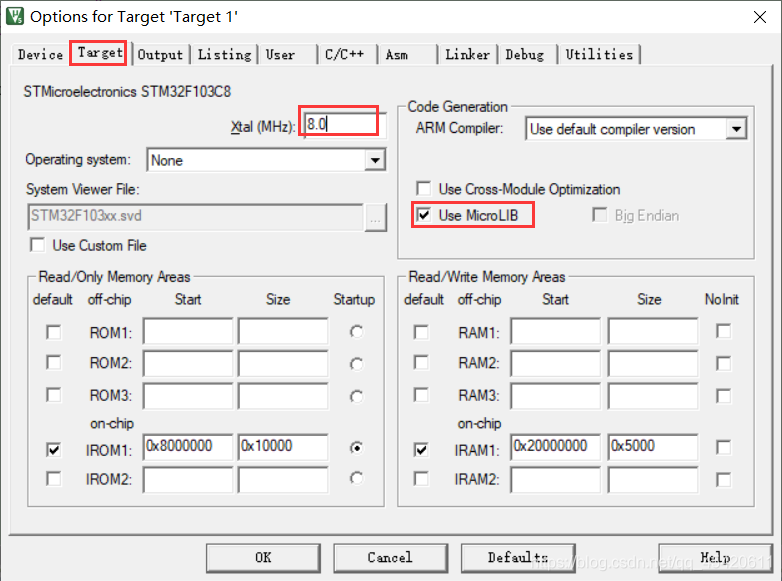
3.魔术棒设置
因为我现在用的单片机晶振为8M的,所以改为8M;下面调试需要用到printf函数,需要勾选MicroLIB库。
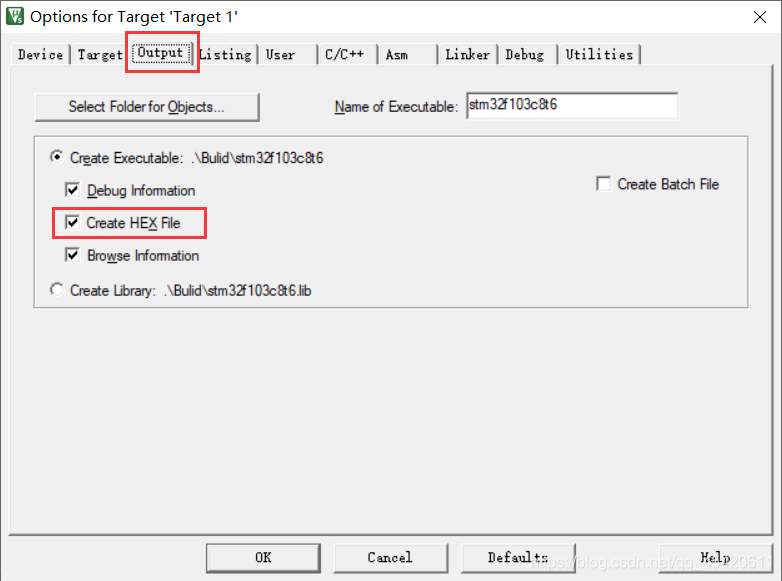
输出文件夹改到Bulid文件夹,加上生成hex文件。
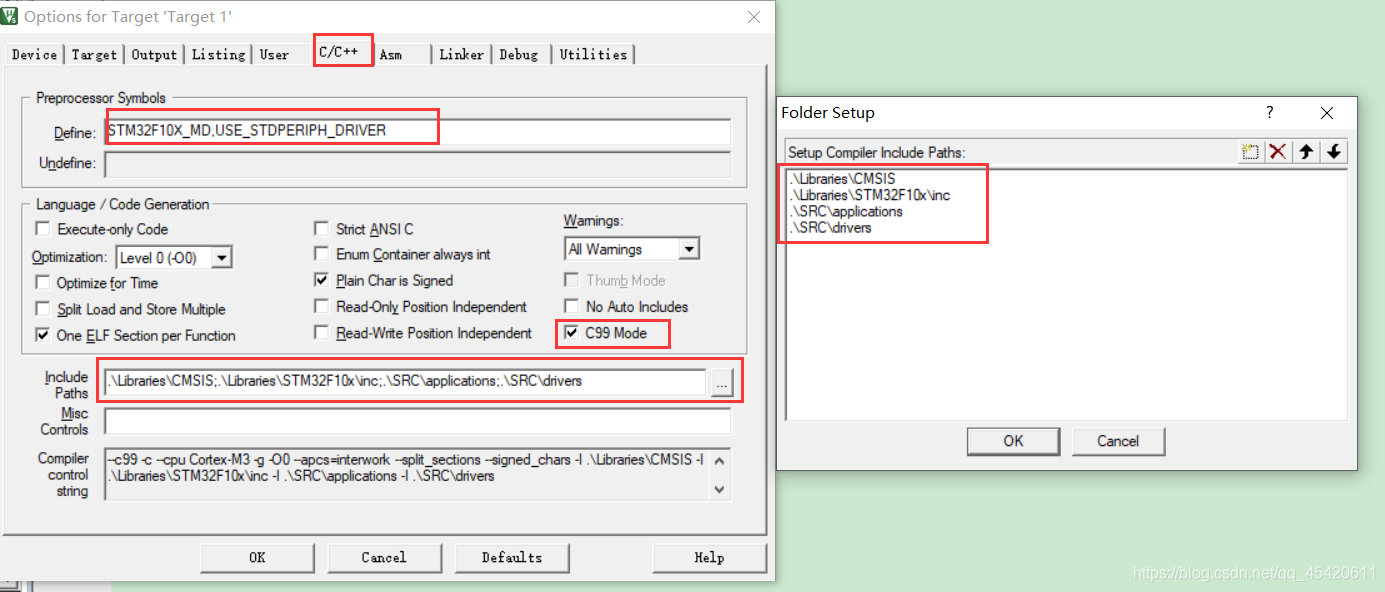
添加配置信息和头文件路径
STM32F10X_MD,USE_STDPERIPH_DRIVER
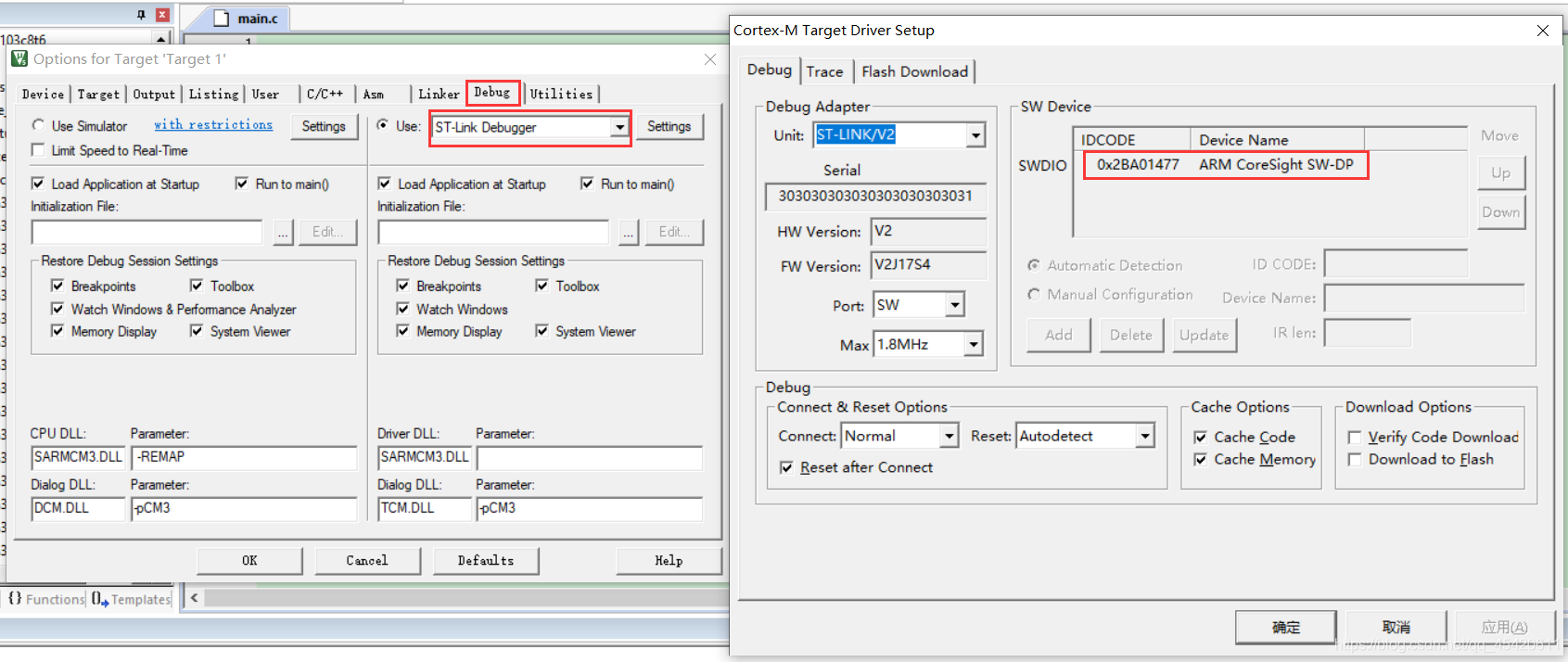
设置调试工具
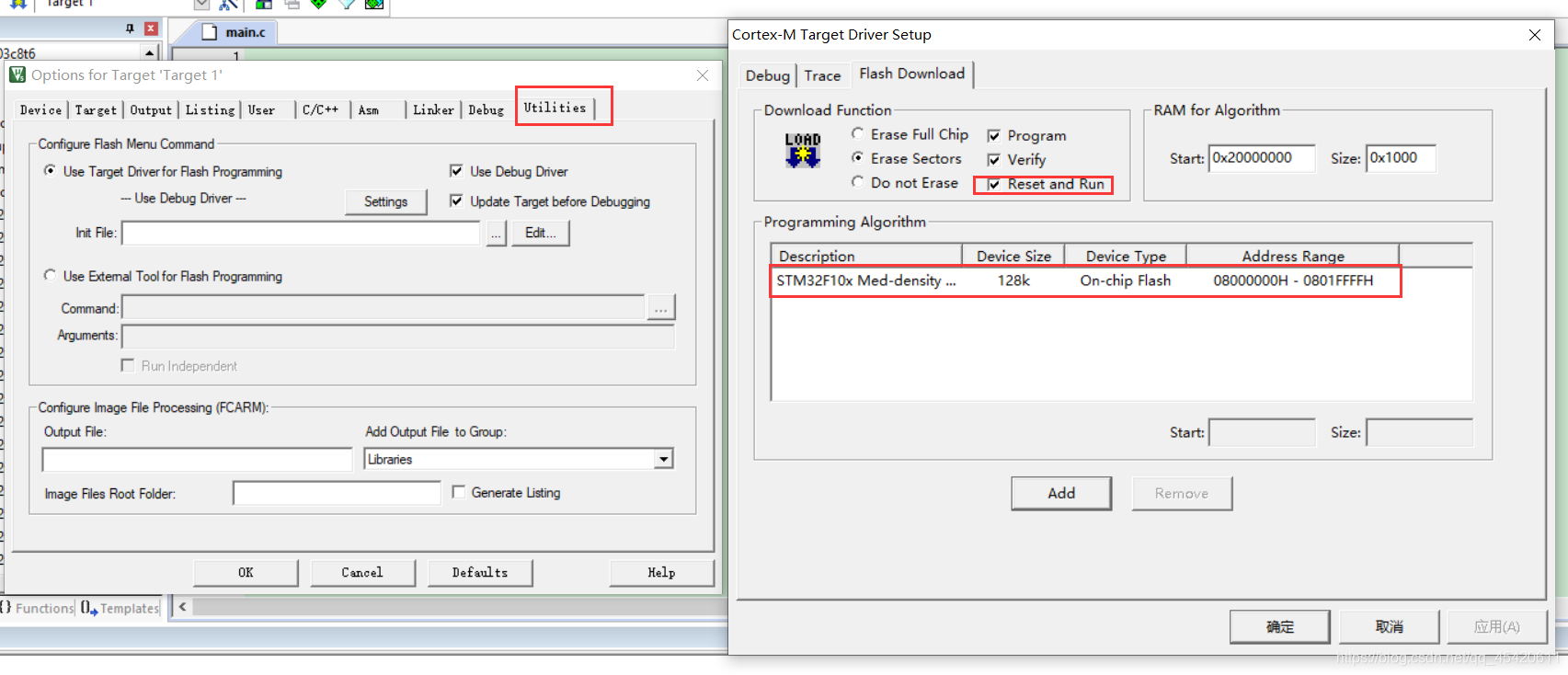
配置flash类型
三、工程测试(串口测试)
1、新建main.c文件保存至applications文件夹中,新建usart.c,usart.h文件保存至drivers文件夹中,用来测试工程。
main.c代码如下:
#include "stm32f10x.h"
#include "usart.h"
int main(void)
{
uart_init(9600);
while(1)
{
printf("STM32\n");
}
}
usart.c代码如下:
#include "usart.h"
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void)
{
u8 Data;
if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET)
{
Data = USART1->DR;
}
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(USART1, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
return (ch);
}
usart.h文件代码如下:
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "stm32f10x.h"
void uart_init(u32 bound);
#endif
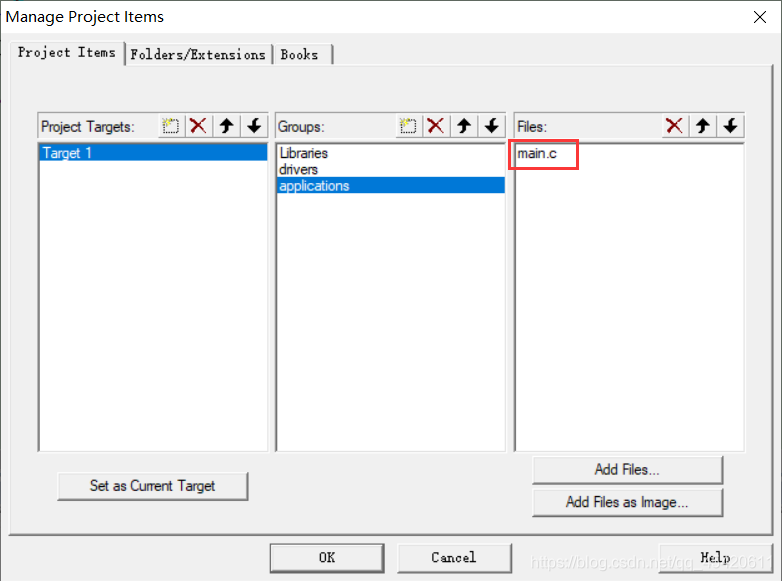
点击三色块将源文件添加到工程目录下

编译成功

测试成功


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









