







 本文介绍了一个基于STM32微控制器和OpenMV摄像头的智能目标跟踪系统,该系统能识别红色小球并判断其所在区域。OpenMV负责物体识别,通过串口将信息传递给STM32,STM32再通过定时器和PWM控制舵机,使摄像头对准目标,实现跟踪功能。
本文介绍了一个基于STM32微控制器和OpenMV摄像头的智能目标跟踪系统,该系统能识别红色小球并判断其所在区域。OpenMV负责物体识别,通过串口将信息传递给STM32,STM32再通过定时器和PWM控制舵机,使摄像头对准目标,实现跟踪功能。
文章目录
- 0 前言
- 课题简介
- 设计框架
- 3 硬件设计
- 4 软件设计
-
* 对被测物体的识别- 判断被测物体所在区域
- 5 最后
0 前言
🔥
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
🚩 基于stm32与openmv的目标跟踪系统
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 项目分享:
https://gitee.com/sinonfin/sharing
课题简介
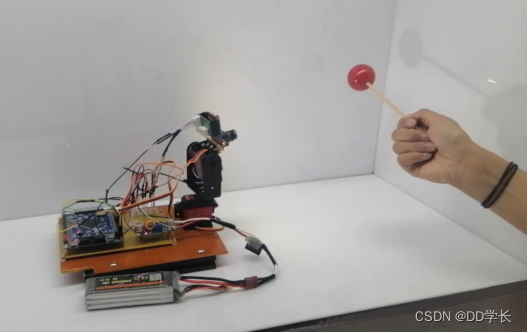
随着智能化技术的迅猛发展,网络智能视频监控系统也得到了广泛的应用。视频监控系统经历了从模拟化向数字化、网络化、智能化的发展过程,目标检测和跟踪技术是计算机视觉的重要组成部分,也是实现监控系统智能化的基础,因其广泛的应用前景而成为近年来的研究热点。本文通过OpenMV作为是识别模块去识别被测物体(以红色小球为例),当其识别到红色小球后,判断小球中心点所在的区域信息,并将其区域标志位通过串口发送给STM32,当STM32接收到位置信息后对x轴、y轴的两个舵机参数进行操作,最后通过定时器输出合适的PWM波,控制舵机旋转相应的角度,使OpenMV摄像头对准被测物体,以实现物体追踪功能。
设计框架
主要分为两个方面:一个是OpenMV识别部分,另一个是STM32控制部分。通过OpenMV对被测物体进行捕捉,所用的被测物体为红色小球,OpenMV编程时,先对红色的色域进行调整,在识别到红色后,对红色进行判断,判断出识别区域中红色区域最大的部分,此举在过滤掉背景中存在小部分红色区域,造成对识别的干扰,识别到红色小球后,用矩形框将其框住,并显示矩形框的中心位置,判断中心位置所在区域,并将区域的标志信息会通过串口传递给STM32,STM32接收到数据后进行相应动作,使定时器输出PWM波,控制舵机旋转相应的角度,使OpenMV摄像头对准被测物体,以实现物体追踪功能。主要研究内容如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









