







卫星导航增强
文章目录
参考链接
卫星导航增强主要是通过增加性能相似的卫星或地面参考站实现提高导航精度和完好性的卫星导航系统。
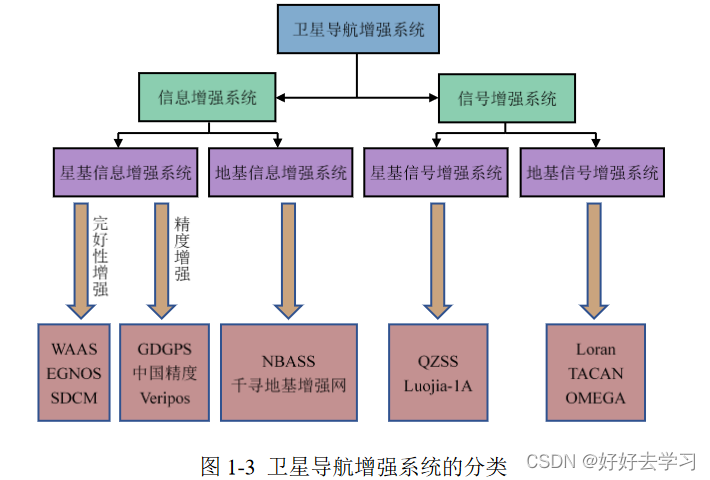
地基增强系统 GBAS (Ground-Based Augmentation Systems)
指通过在地面建设地基增强站,依托这些站点和通讯网络,播发地面基准站的差分数据给各类需要高精度定位的终端,辅助终端通过RTK算法获得高精度定位。

工作流程:
- 建设区域范围的基准站(一般30-60km 一个站),通过网络把基准站的卫星观测数据实时汇总到中央处理器;
- 中央处理器通过基准站已知的精确位置和观测数据,计算局部区域的空间误差、对流层、电离层延迟误差等;
- 基于区域基准站的数据和计算的误差信息,在指定位置生成虚拟参考站的观测数据;
- 通过通讯网络,把离终端用户最近的虚拟参考站的观测数据和误差信息播发給终端。
- 定位终端通过通讯网络接收到虚拟参考站的观测数据和区域的对流层、电离层误差信息,结合终端的定位算法进行差分解算,最终得到高精度的定位结果。
星基增强系统SBAS(Satellite-Based Augmentation System)
指通过在地面(因为空中和海上无法实现)建设星基增强站,依托这些站点和搭载卫星导航信号转发器的地球静止轨道卫星(GEO)卫星,来向用户播发星历误差、卫星钟差、电离层延迟等误差修正信息,实现对原有卫星导航系统定位精度的改进。

- 建设全球范围的基准站(一般600-1500公里一个站),并通过网络网络把卫星观测数据实时汇总在中央处理器;
- 中央处理器通过基准站已知的精确位置和观测数据,计算卫星的轨道误差、钟差、电离层延迟误差等差分信息;
- 上行注入站把中央处理器计算的差分信息注入到同步卫星;
- 同步卫星广播差分信息;
- 定位终端通过接收信号,解析出差分信息,结合终端的定位算法,修正观测数据,最终得到高精度的定位结果。
地基增强系统播发虚拟参考站的观测数据和误差信息,最终的高精度定位结果需要终端的RTK定位算法来解决;
星基增强系统只是解决部分误差修正信息,最终的高精度定位结果需要终端的PPP定位算法来解决。
星基增强技术由于其定位原理的特性,导致它对于环境、硬件要求都极其高,所以只能满足部分行业的需求。从技术特点和行业特性上来看,星基增强和地基增强属于互补的两种技术手段。
| 主要指标 | 地基增强 | 星基增强 |
|---|---|---|
| 布站范围 | 区域 | 全球 |
| 布站密度 | 30-60 km一个站 | 600-1500km一个站 |
| 播发方式 | 地面通讯网络,双向传输 | 卫星广播,单向传输 |
| 播发数据 | 虚拟参考站的卫星观测数据和电离层、对流层误差等差分信息 | 卫星轨道误差、钟差、电离层误差等差分信息 |
| 差分技术类型 | 局域差分技术 | 广域差分技术 |
| 使用算法 | RTK定位算法 | PPP定位算法 |
| 初始速度 | 1-10 S | at least 15 min |
| 定位精度 | 1-5 cm | 4-10 cm |
















 1688
1688











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









