







 本文深入探讨了机器人运动学的基础概念,包括正运动学与逆运动学,并通过实例详细讲解了如何建立坐标系、确定各关节参数及变换矩阵,进而求解机器人运动学方程。
本文深入探讨了机器人运动学的基础概念,包括正运动学与逆运动学,并通过实例详细讲解了如何建立坐标系、确定各关节参数及变换矩阵,进而求解机器人运动学方程。
1.机器人位置运动学
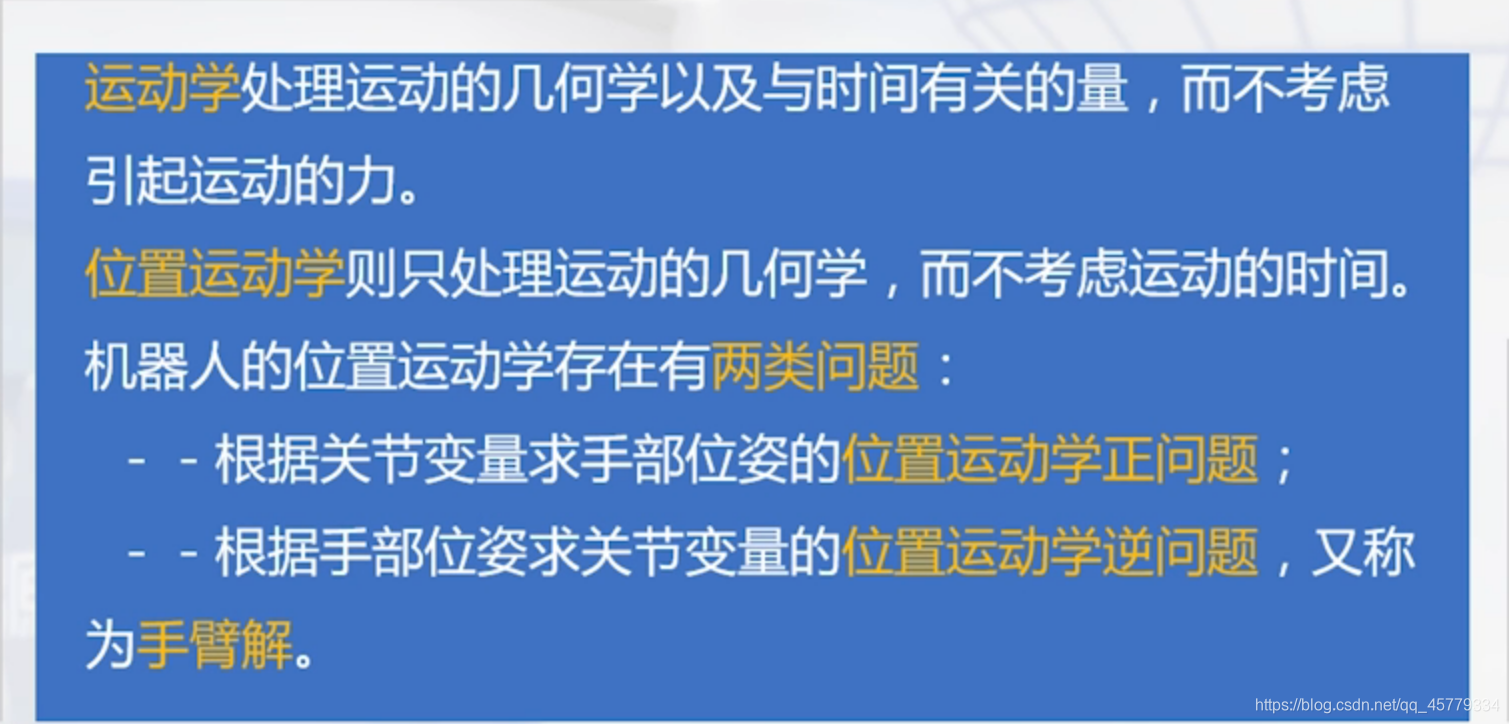


2.机器人的正运动学

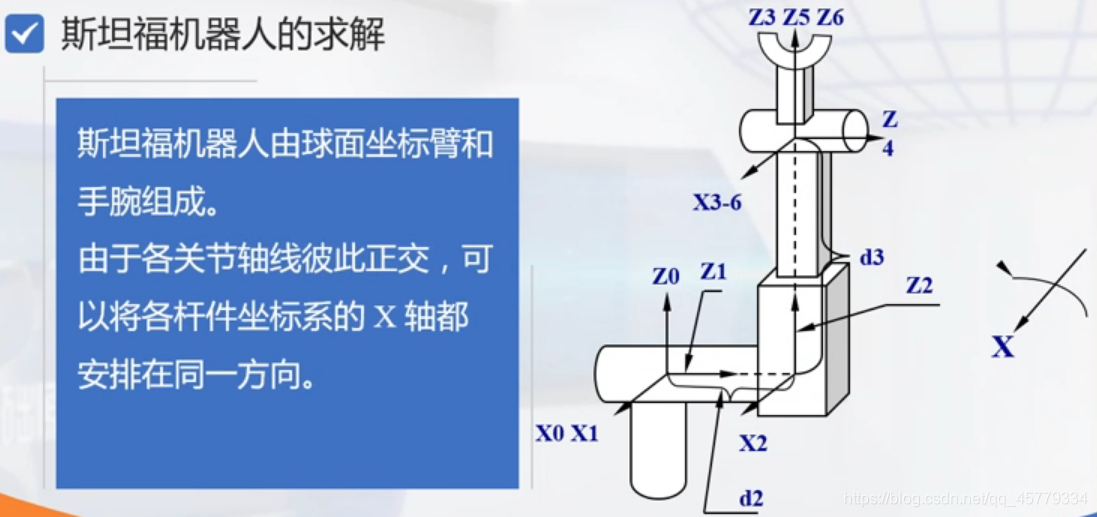
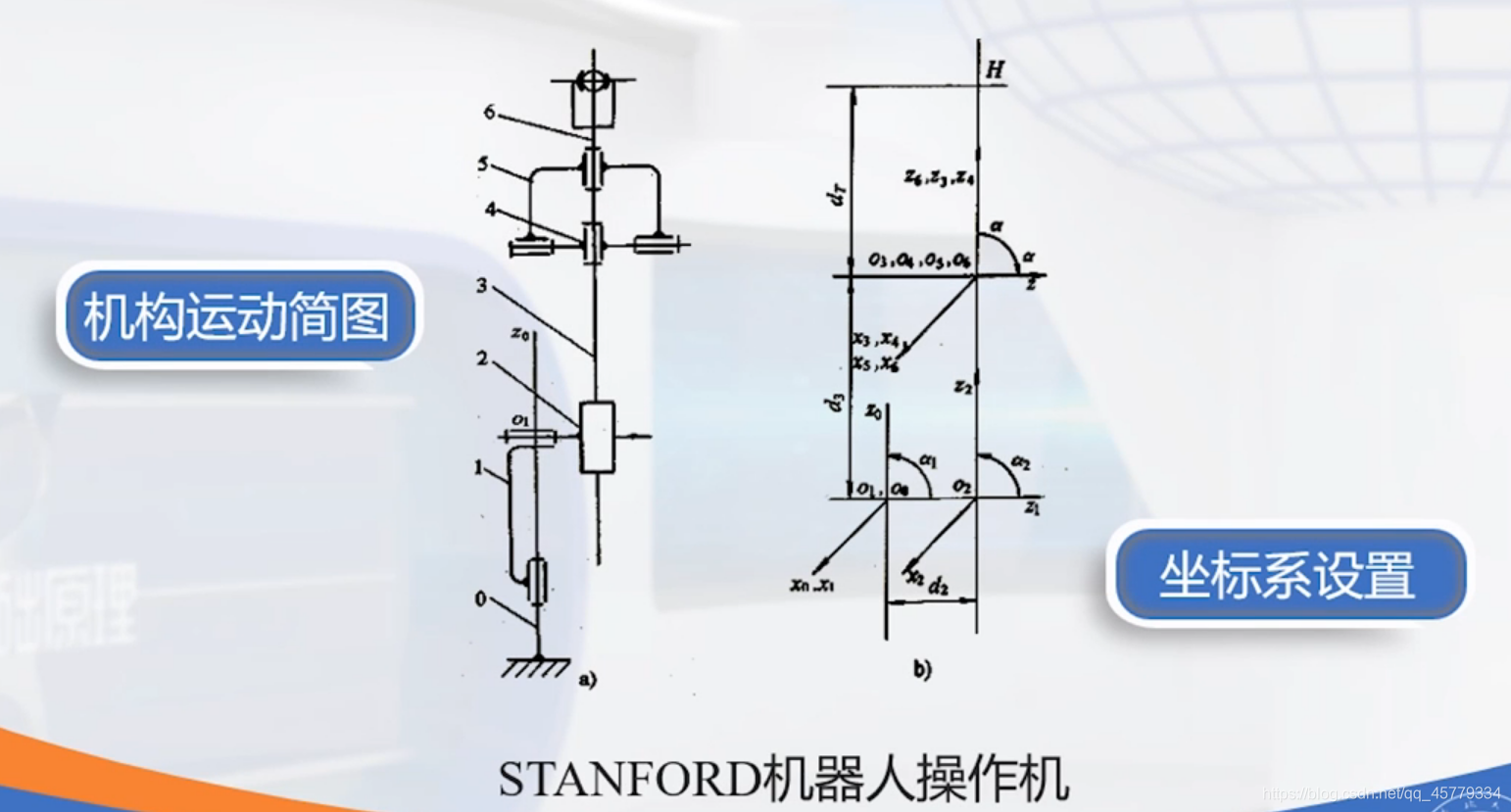
斯坦福机器人求解
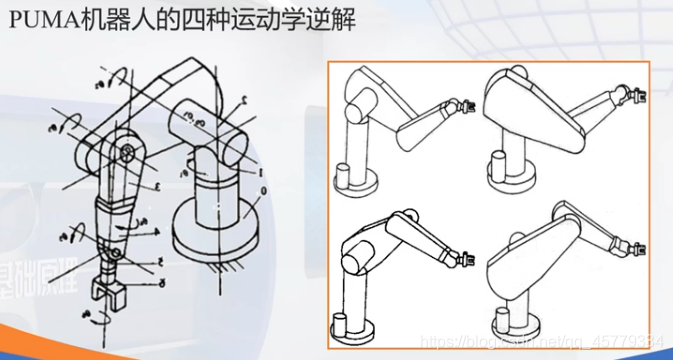
3.机器人逆运动学
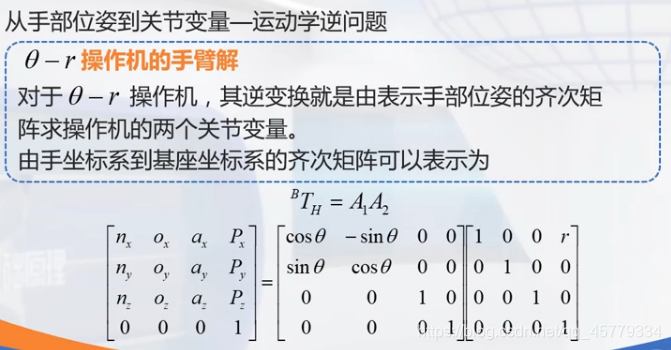
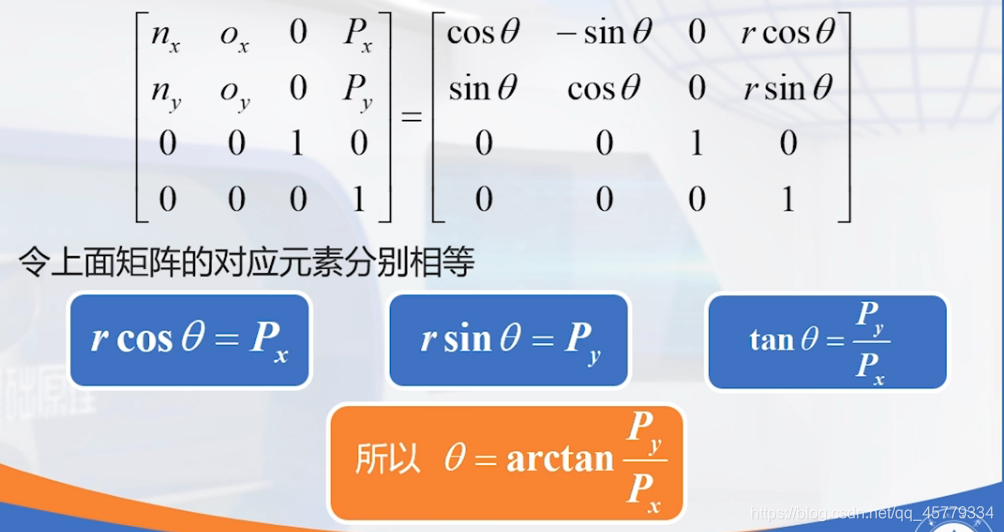
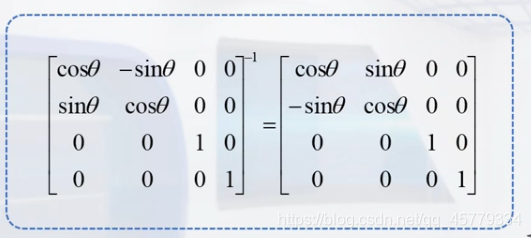
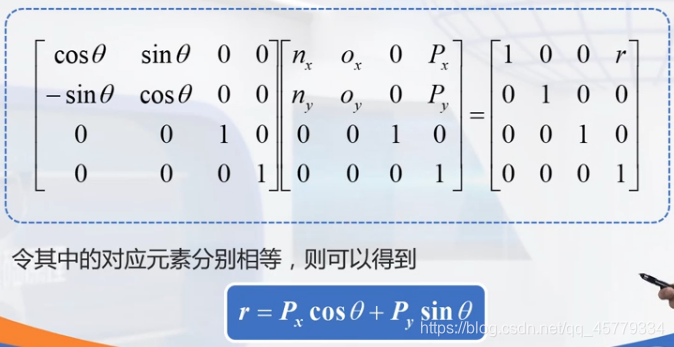
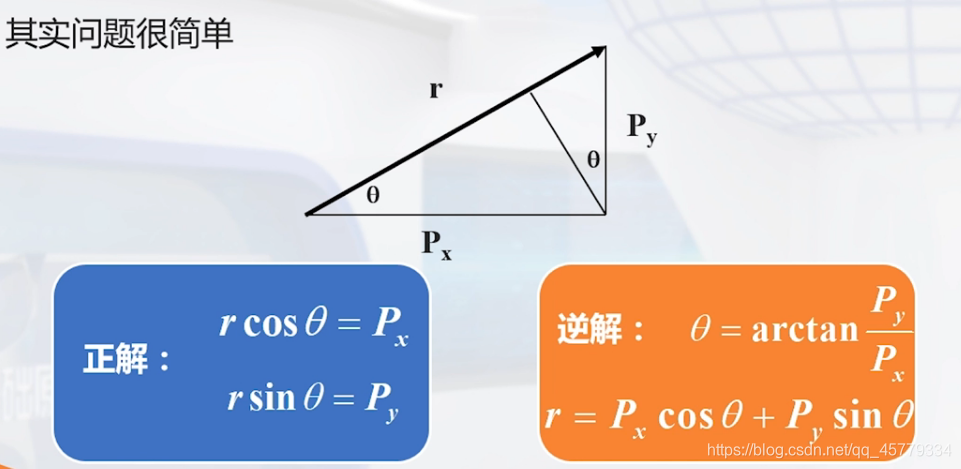
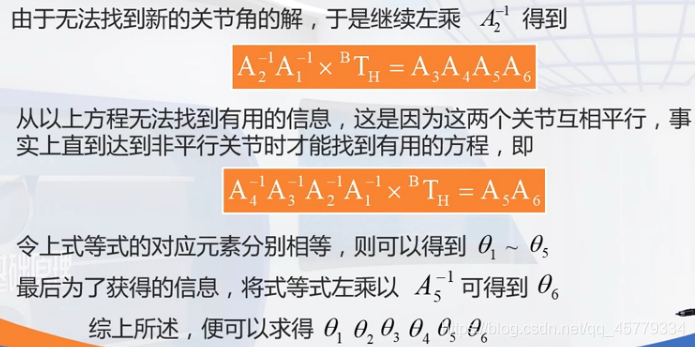
机械臂通解
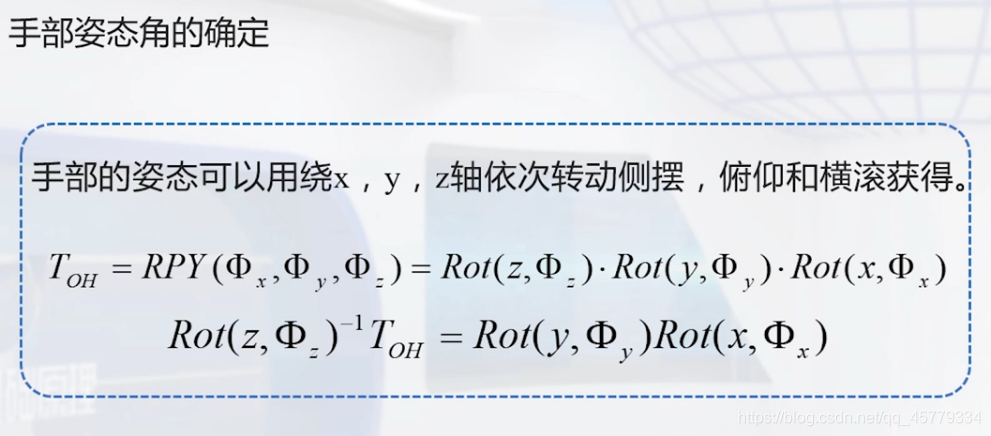
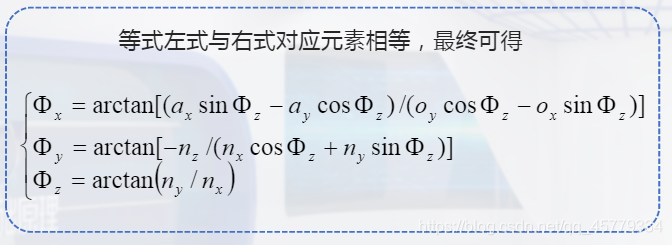
求解方法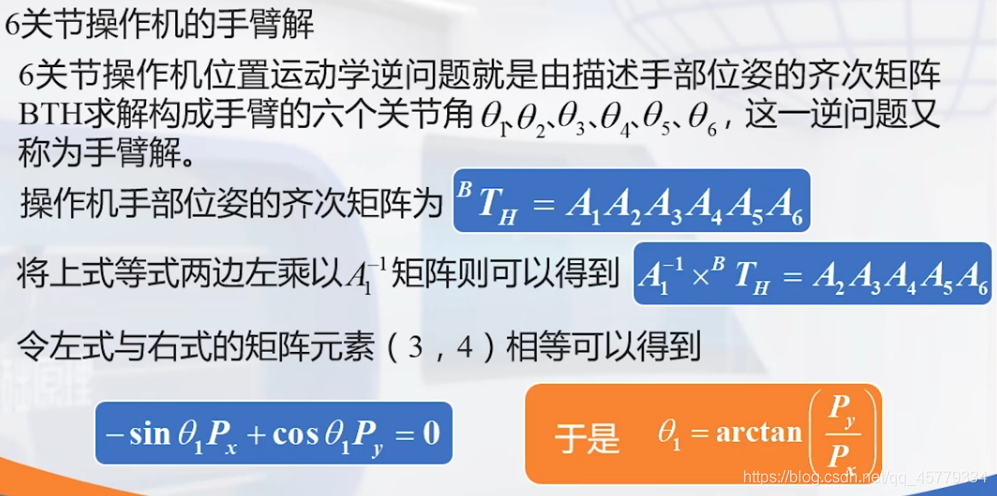
求解时可能出现的问题
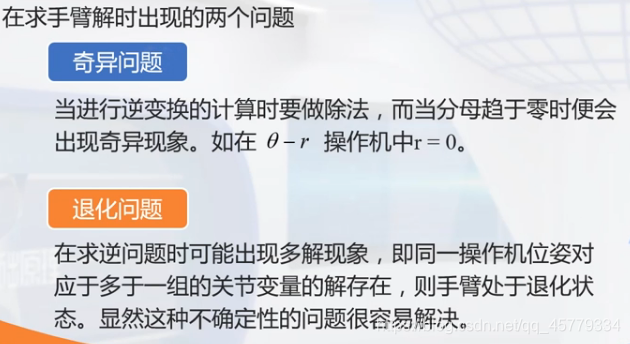
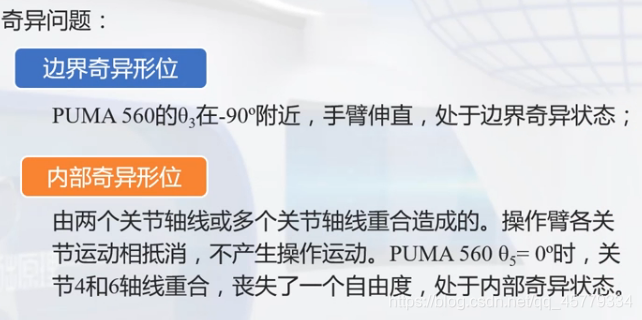
奇异问题
关节角度相同,但姿态不同
4.机器人运动学实例分析
运动学问头分析方法
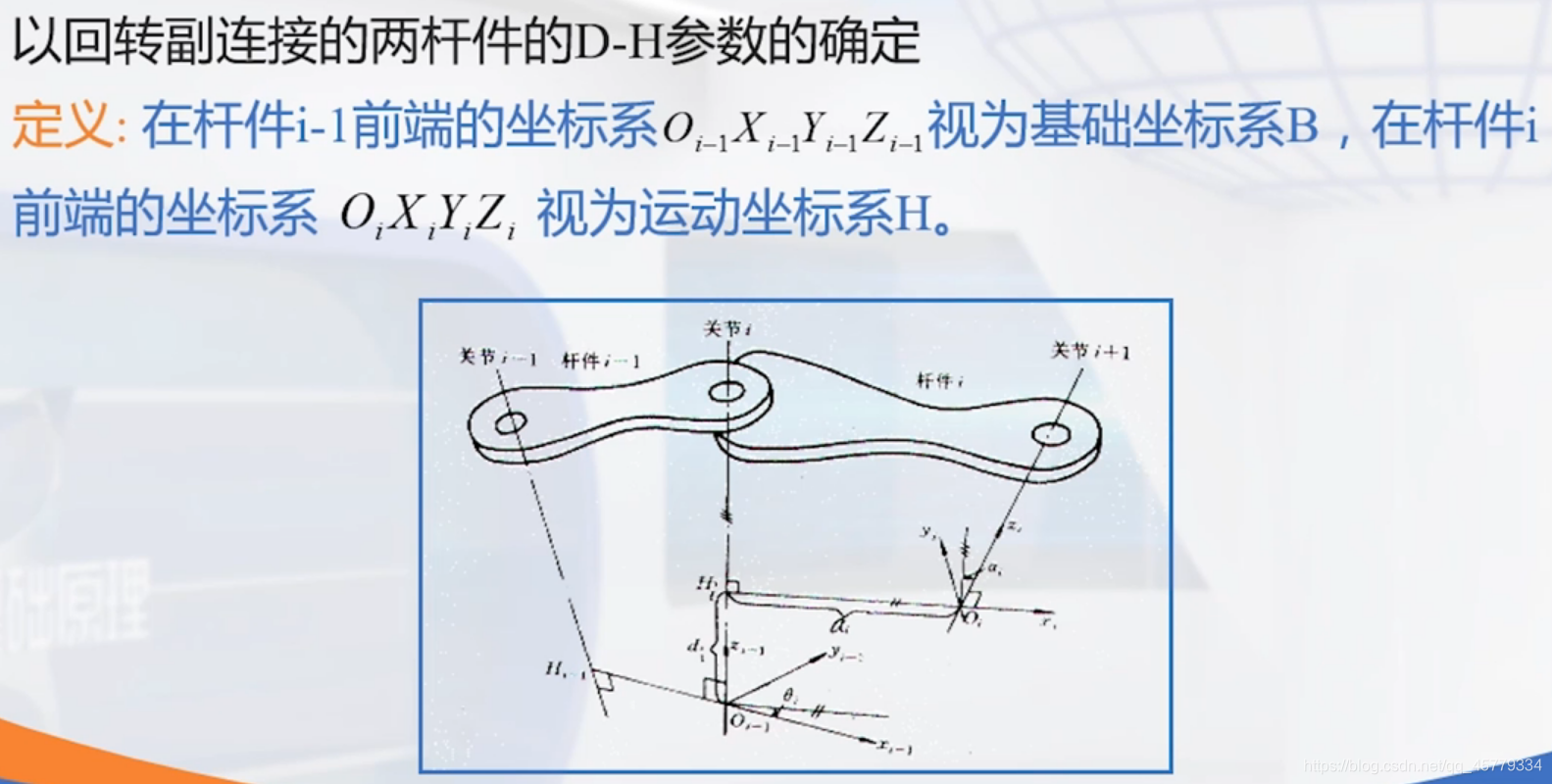
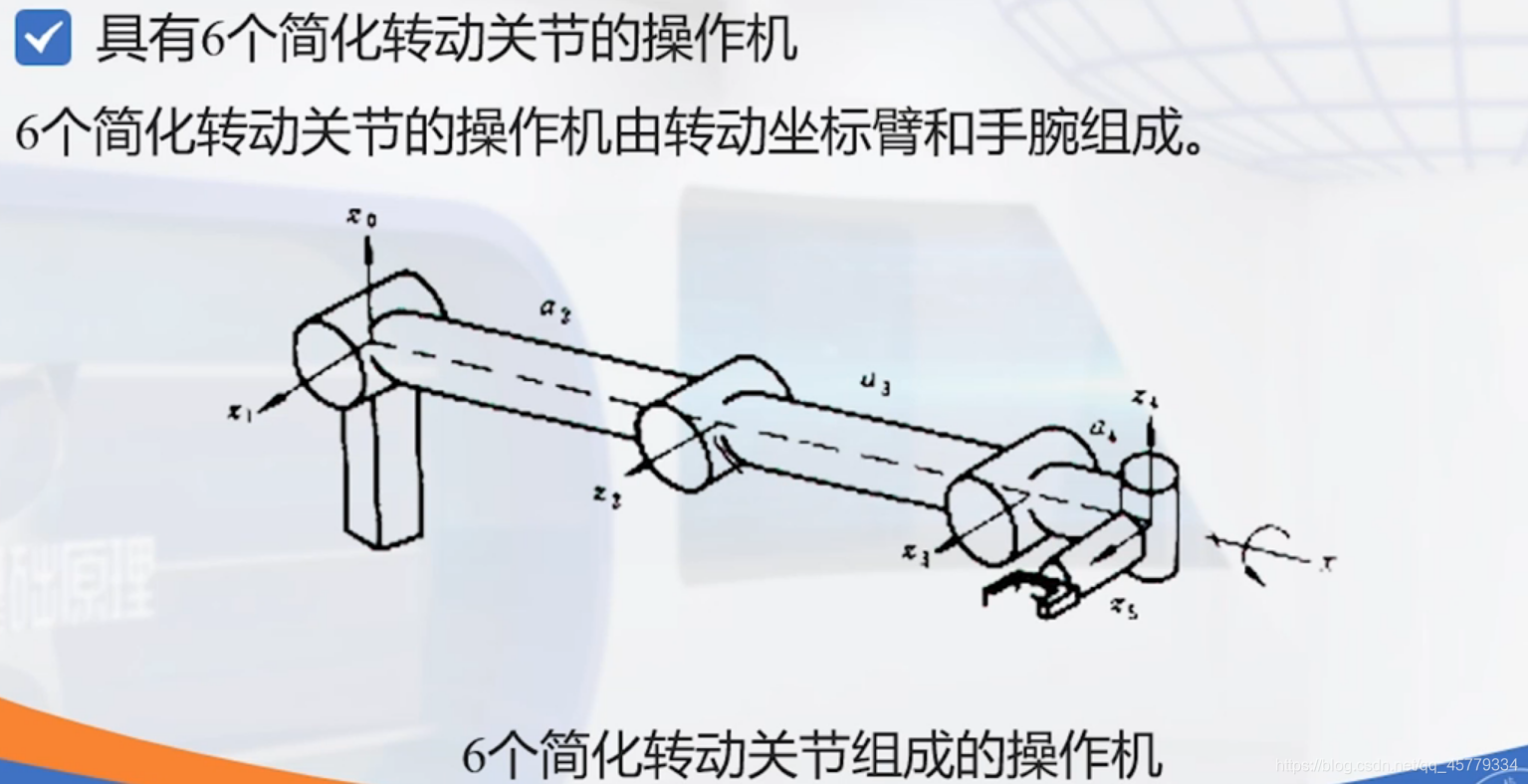
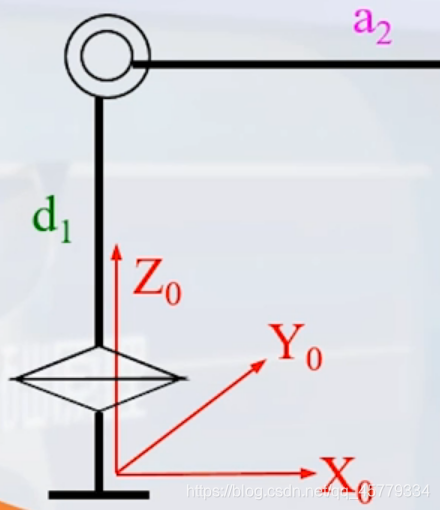
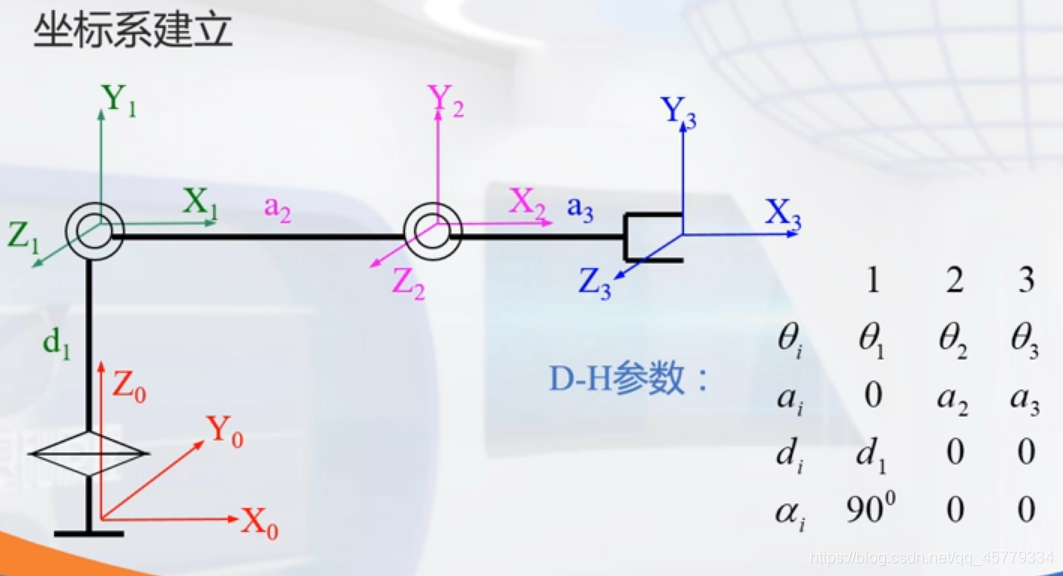
(1)建立坐标系
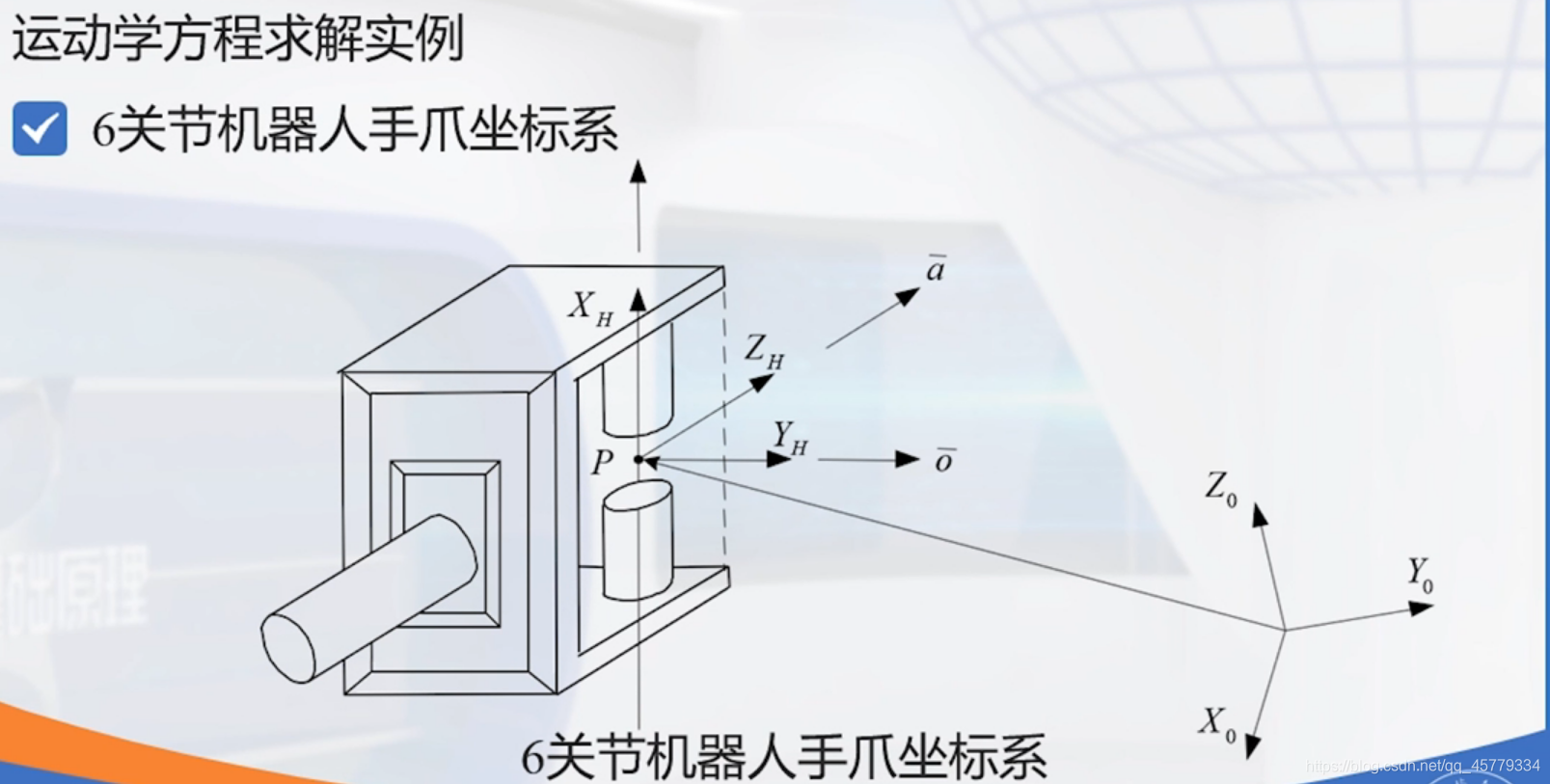
坐标系轴方向确定
X代表接近物体的方向Z代表轴的旋转方向Y由右手坐标规则来给出
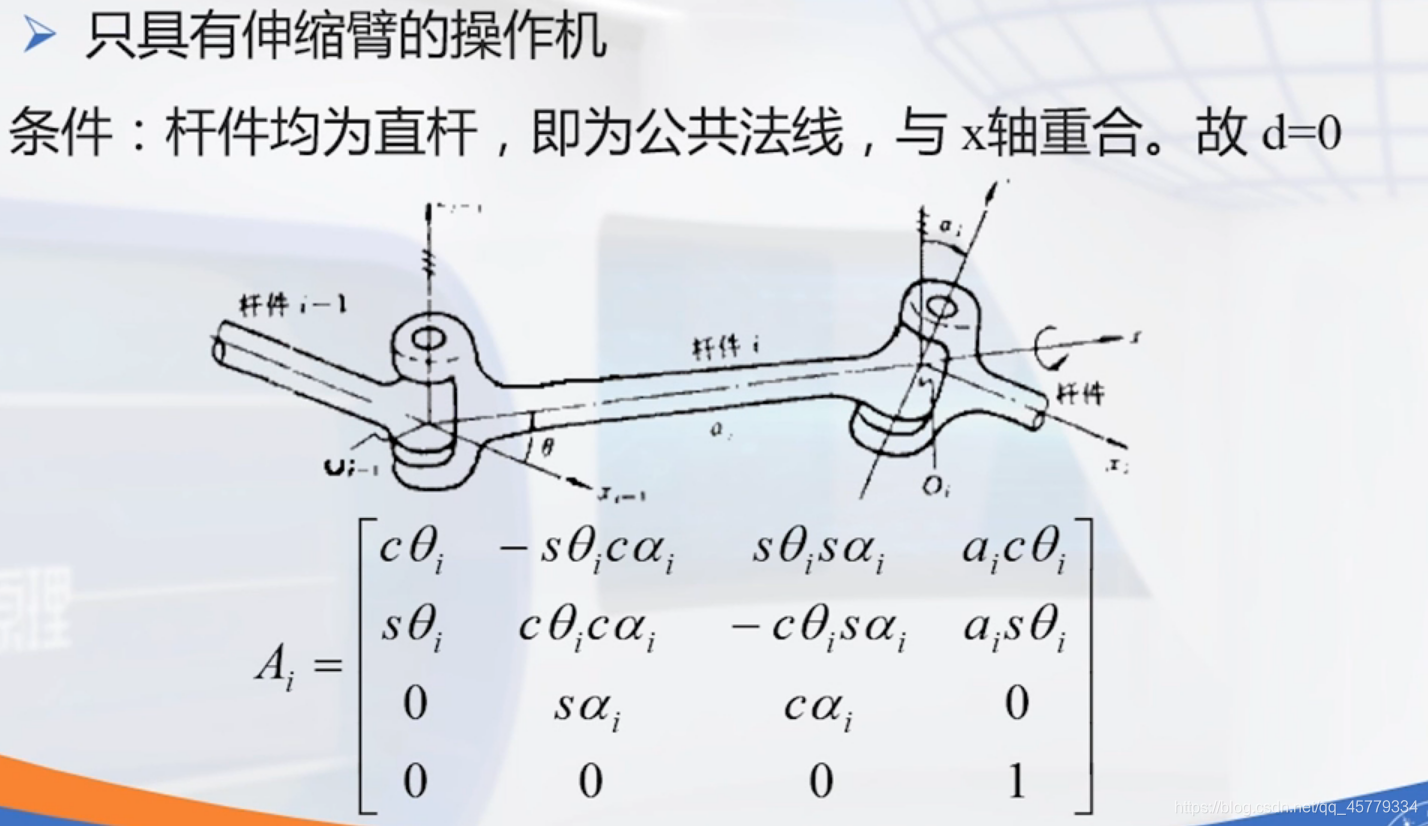
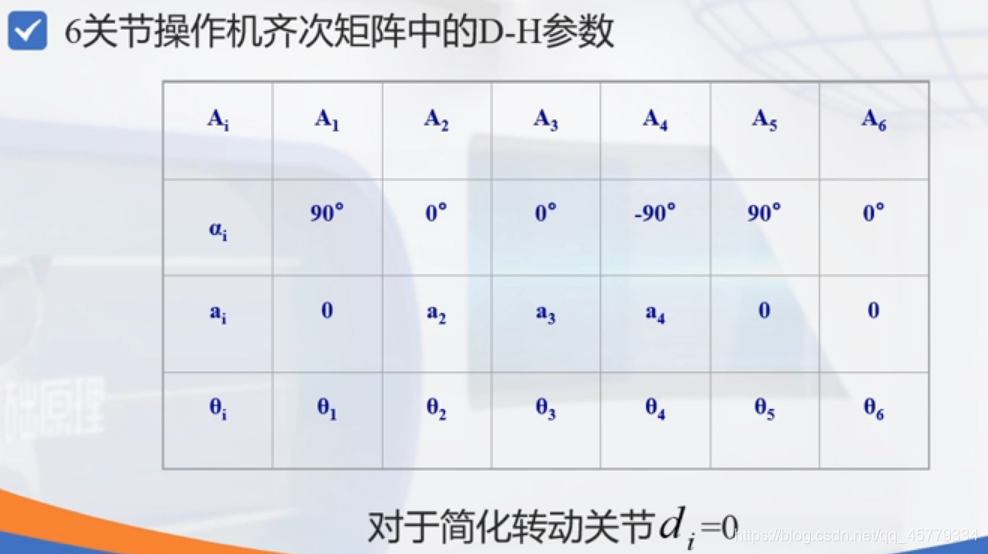
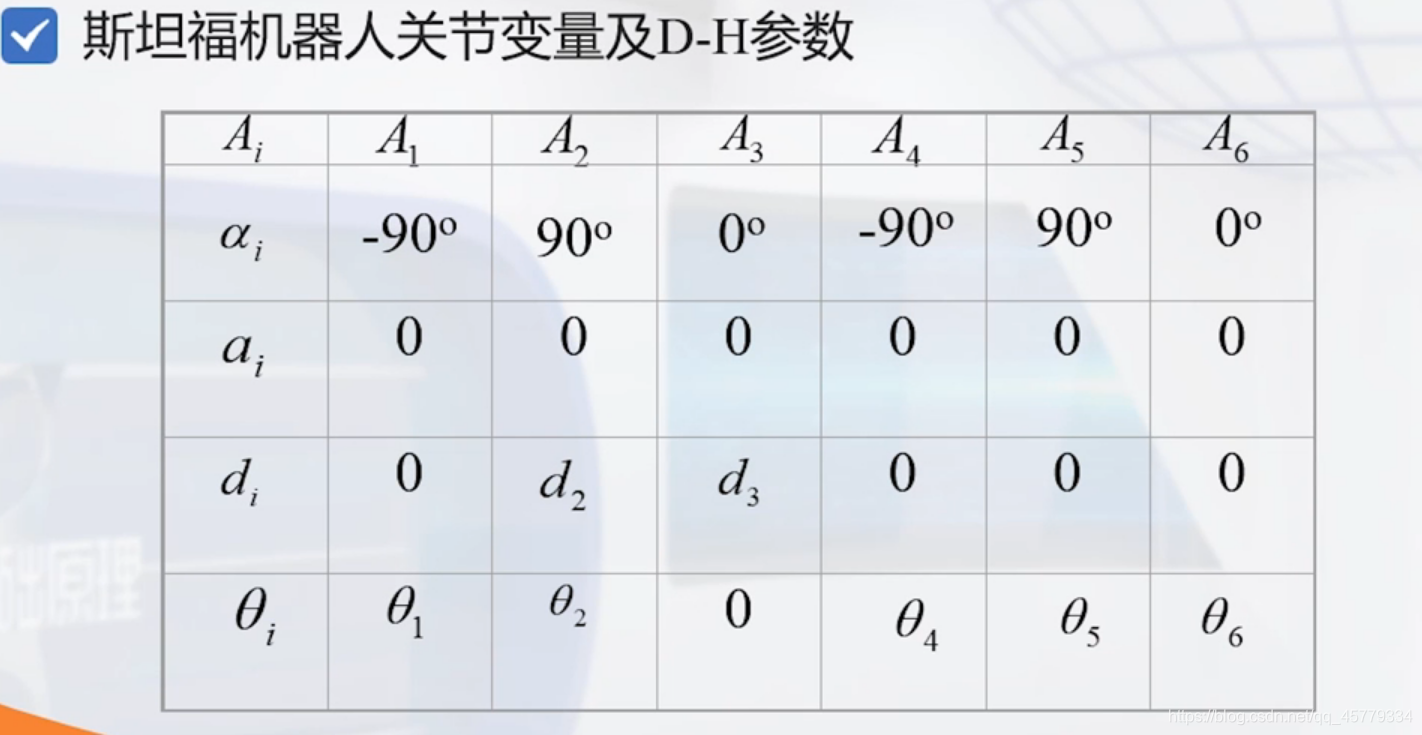
(2)写出各关节D-H参数
θ是两个坐标之间的夹角,例如:θ1是第0个和第1个坐标之间的夹角a是杆长d是横距α是扭转角
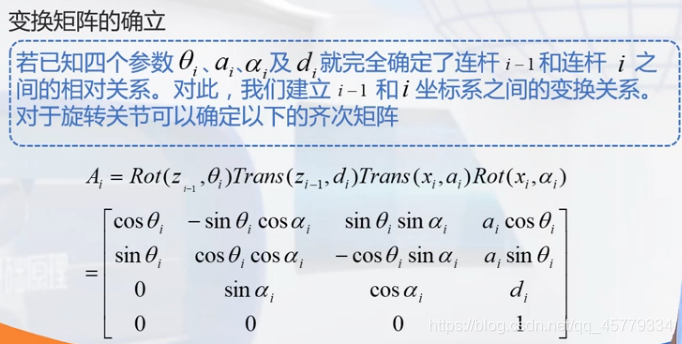
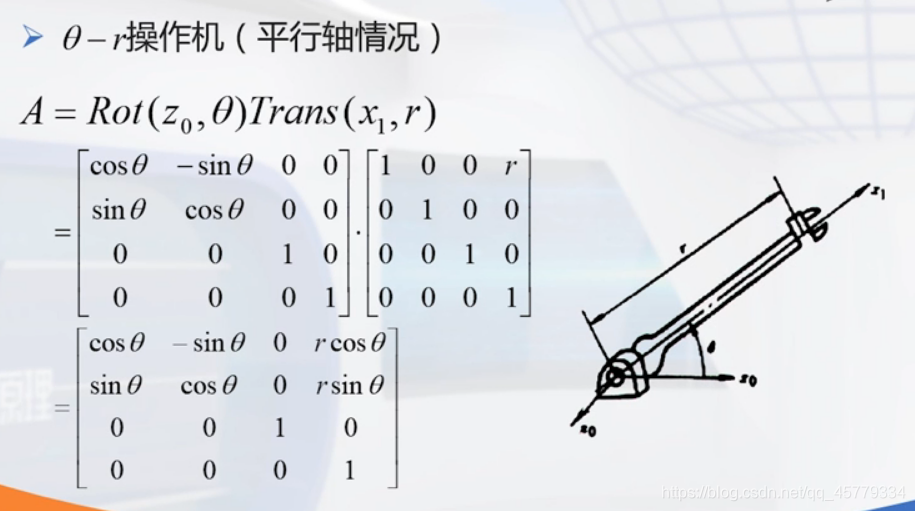
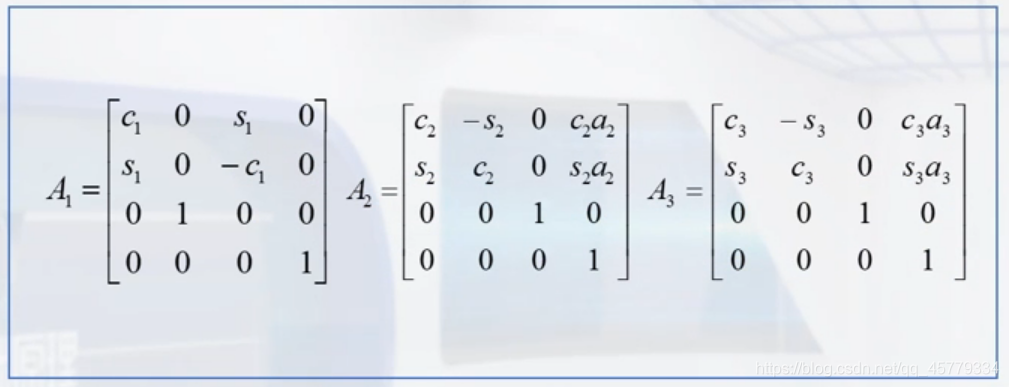
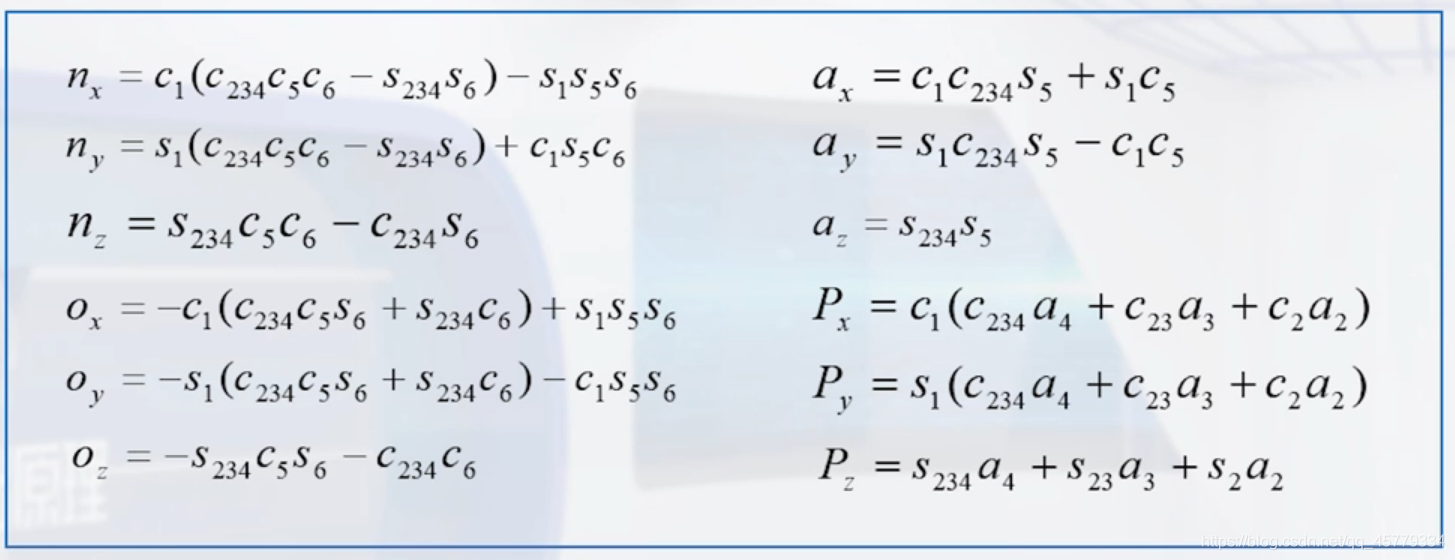
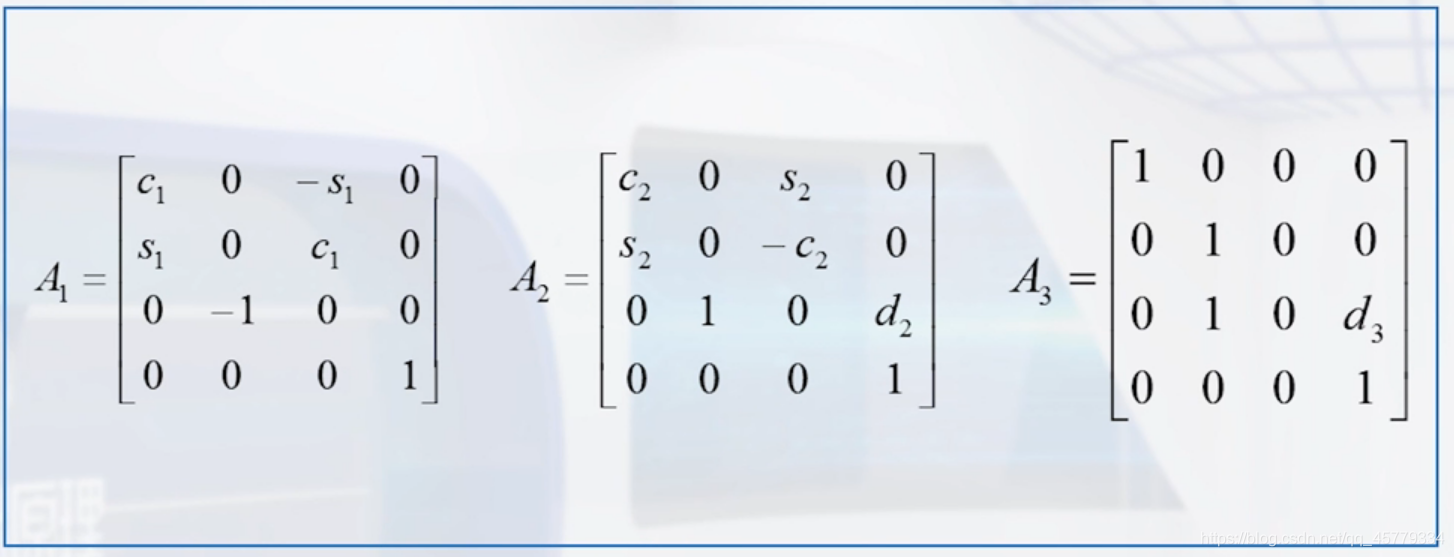
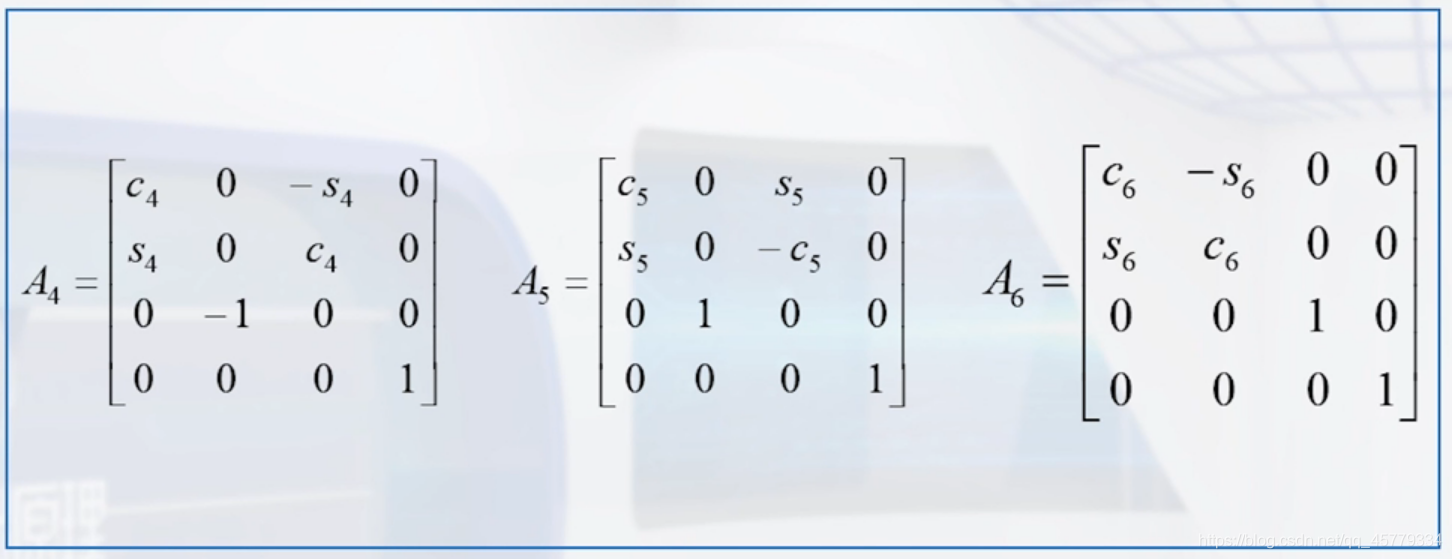
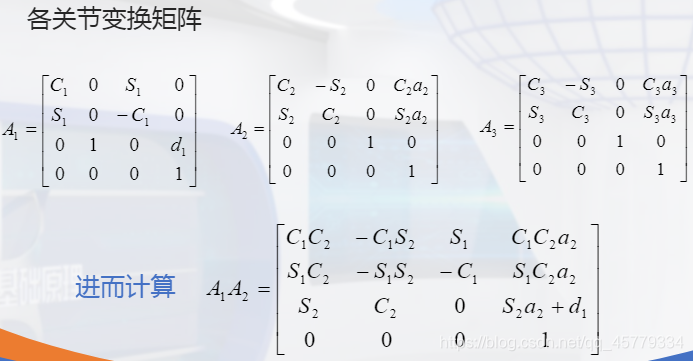
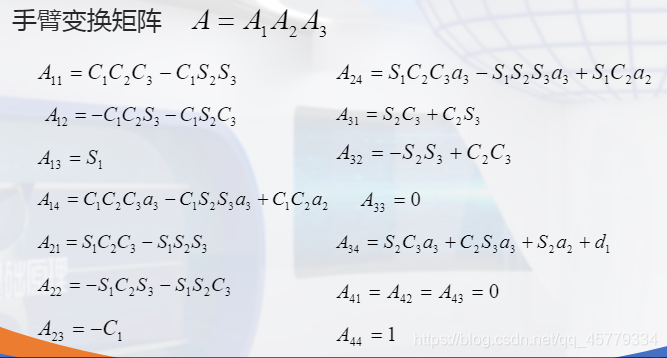
(3)写出各关节变换矩阵
C代表cosθS代表sinθ
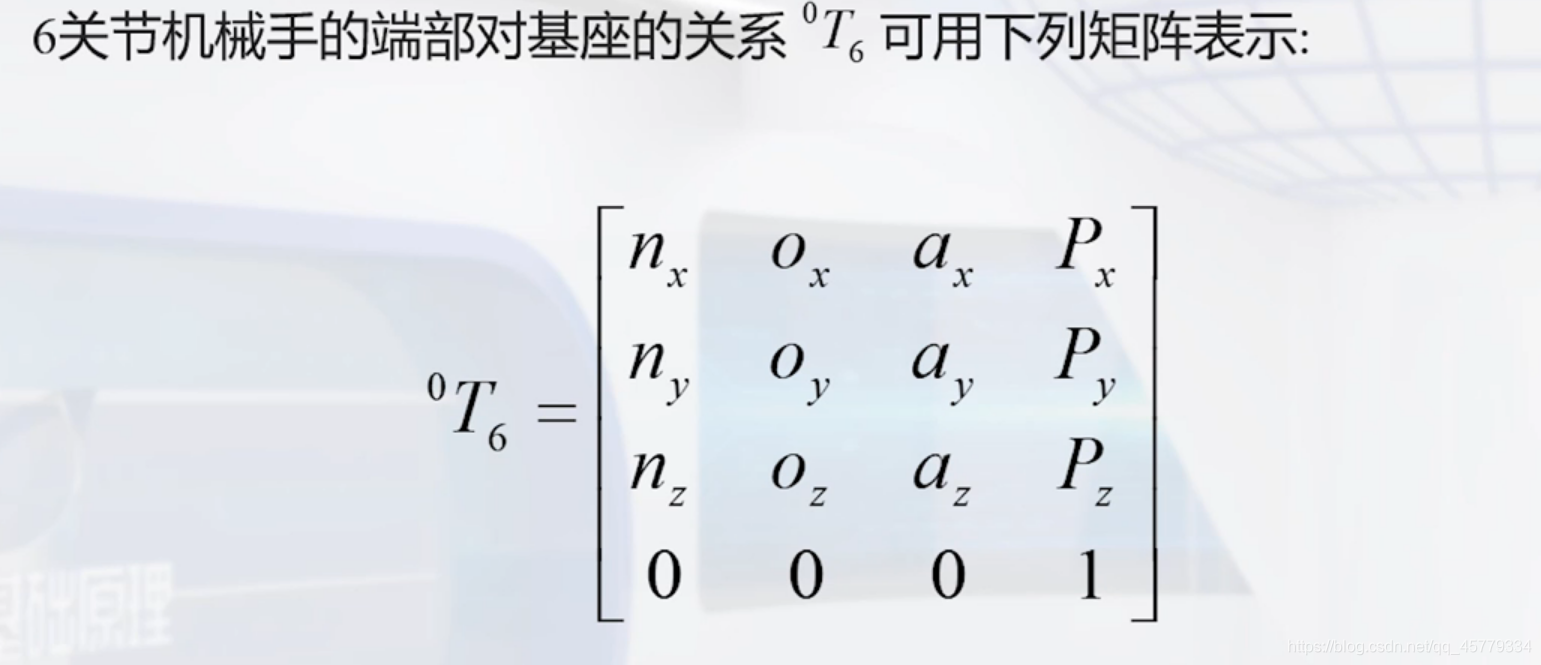
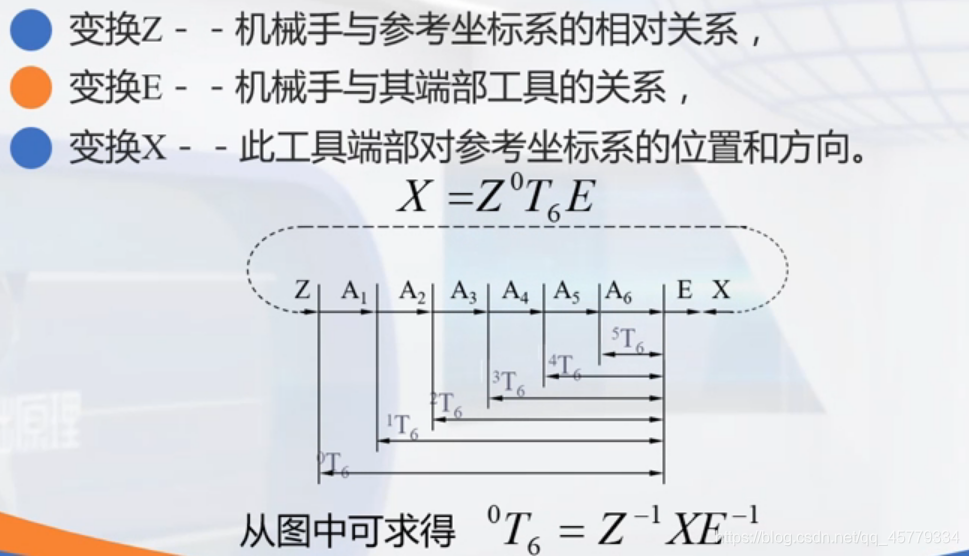
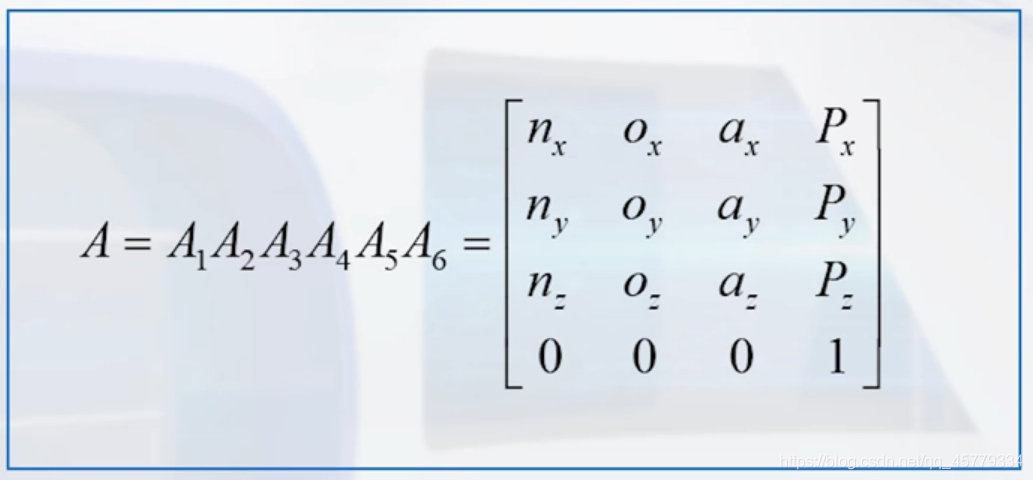
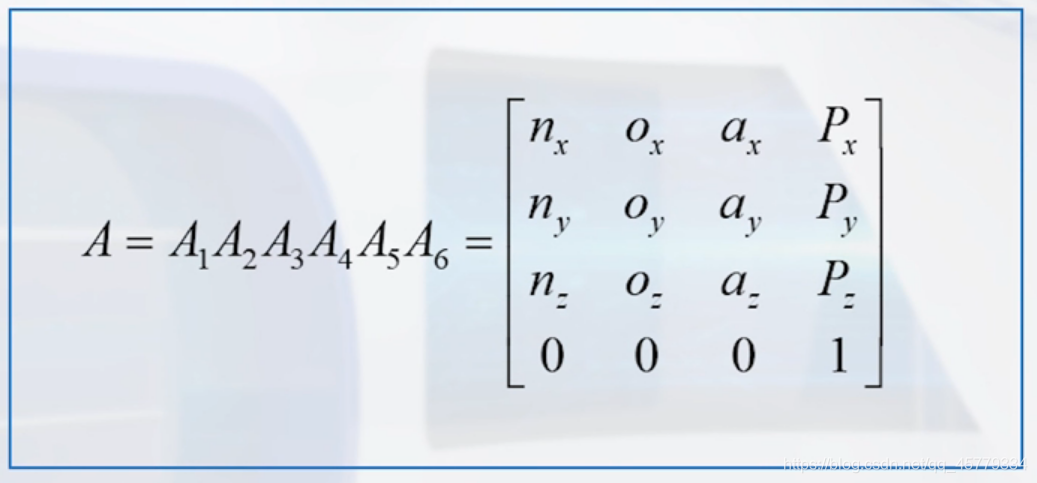
(4)建立手臂运动学方程
(5)运动学仿真
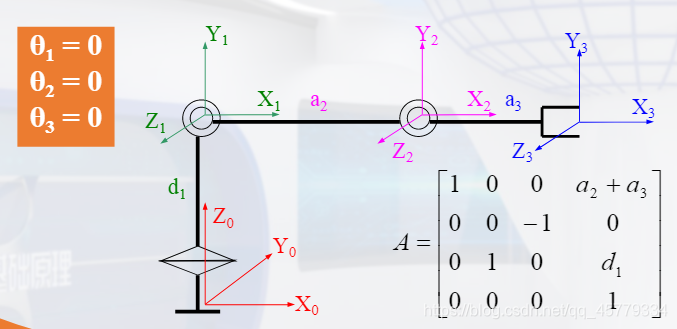
条件1:
θ1= 0,θ2 = 0,θ3 = 0
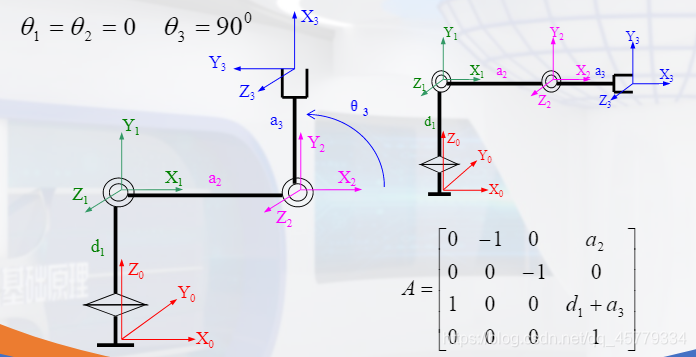
条件2:
θ1= 0,θ2 = 0,θ3 = 90
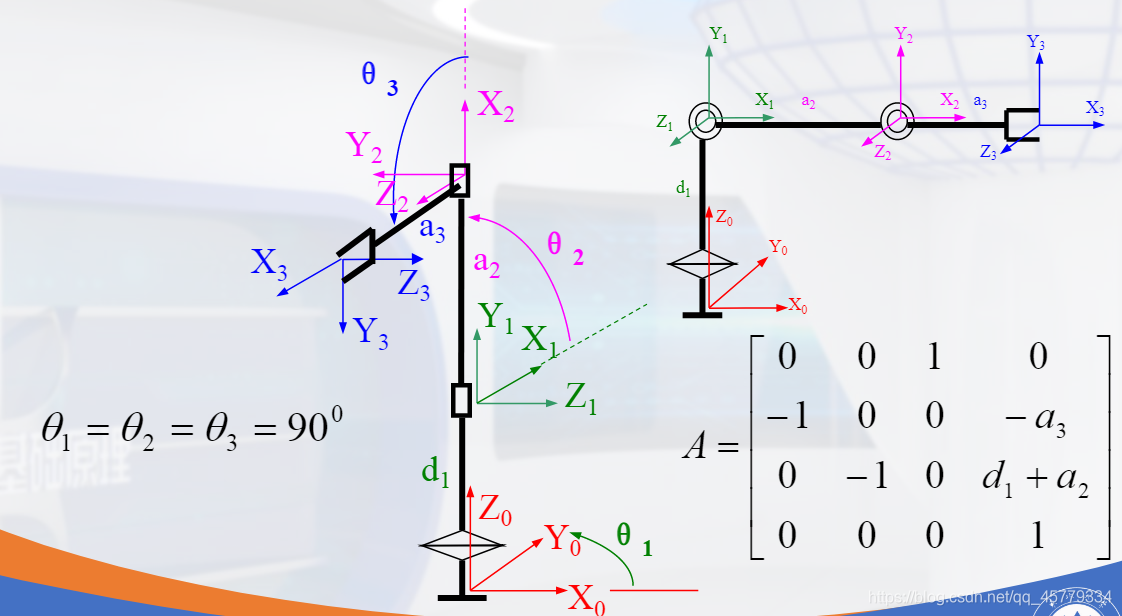
条件3:
θ1= 90,θ2 = 90,θ3 = 90


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









