









 本文详细介绍了在CanmvIDE环境中使用K210烧录工具烧录.bin/.kfpkg和.kmodel文件,以及如何下载Python脚本到开发板,包括设置下载地址、串口连接和文件存储策略。
本文详细介绍了在CanmvIDE环境中使用K210烧录工具烧录.bin/.kfpkg和.kmodel文件,以及如何下载Python脚本到开发板,包括设置下载地址、串口连接和文件存储策略。
学习目标:
-
在Canmv IDE环境下学习如何使用K210烧录工具将二进制文件.bin(.kfpkg)/模型文件.kmodel烧录到K210开发板的Flash存储位置上
-
在Canmv IDE环境下学习如何将编写的Pyhon文件(脚本)下载到CanMV Cam(K210学习板),学习多种下载方法,下载地址的设置等
学习内容:
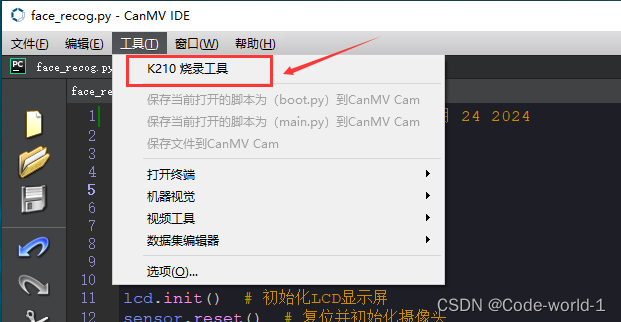
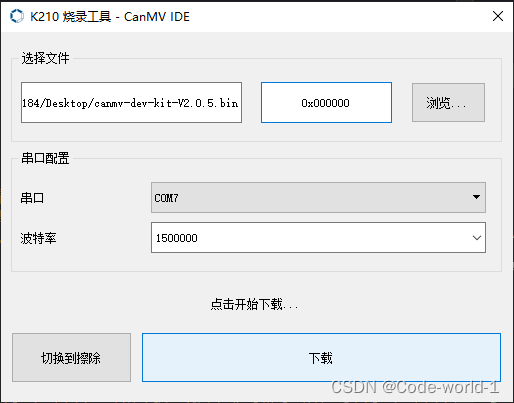
1、K210烧录工具的使用:使用K210烧录工具将二进制文件.bin(.kfpkg)/模型文件.kmodel烧录到K210开发板的Flash存储位置上,BOOT程序从默认启动Flash地址开始读取,我们可以设置下载的起始地址,文件就会从这个地址开始下载保持,防止擦除以前的文件等,步骤教程如下:
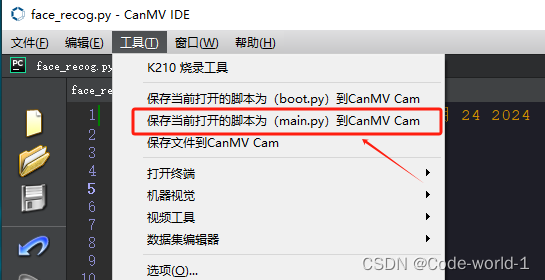
2、保存当前打开的脚本命名为(boot.py、main.py)下载到CanMV Cam:我们新建或者打开文件(脚本)时,由于需要用到硬件(按键等)功能时,不能直接在Canmv IDE下直接调用,所以需要作为主程序下载到开发板中,首先需要将开发板与Canmv IDE环境通过串口的方式通讯(基础连接无法通信可以Mode-2),下载时在Canmv IDE环境下通过串口的方式下载到开发板内存中(优先TF卡),去除注释并将空格转换为制表符下载即可,步骤教程如下:

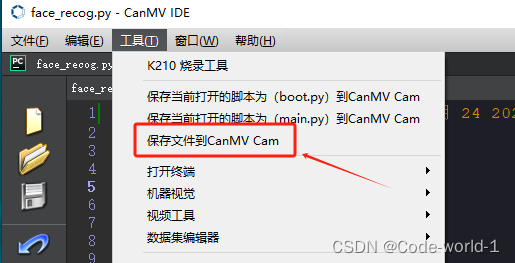
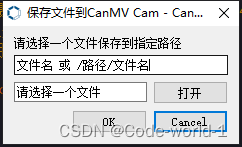
3、保存文件到CanMV Cam:我们可以直接选用PC机本地的文件进行下载,并且可以设置以文件名/文件路径两种方式进行下载,首先需要将开发板与Canmv IDE环境通过串口的方式通讯(基础连接无法通信可以Mode-2),步骤教程如下:
总结:
-
在Canmv IDE中进行K210开发板的烧录。选择.bin或.kfpkg格式的文件,以及.kmodel模型文件,通过串口传输至Flash存储
-
对于程序脚本下载,下载前确认串口连接无误。接着系统会去除注释并将空格替换为制表符,然后优先存储在TF卡上
-
下载文件可以通过指定文件名或路径进行,下载前确认串口连接无误。

















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









