







先展示下定时器通道表:
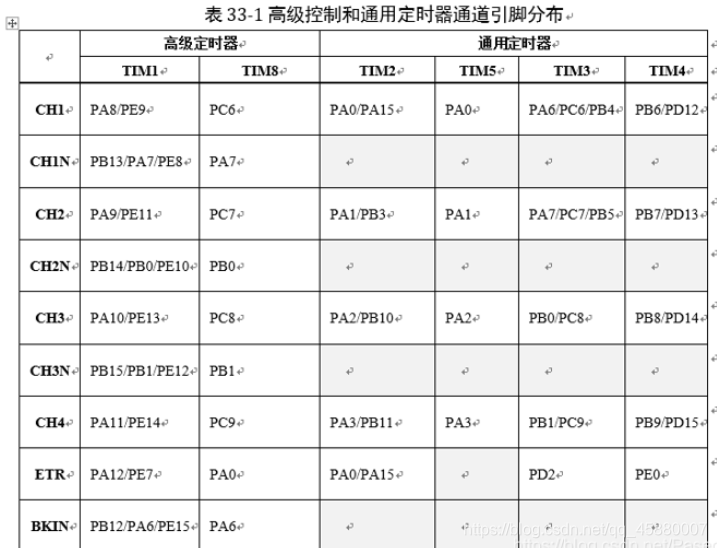
参考正点原子PWM,端口号为PB5
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高 TIM_OCPolarity_Low
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
注意这里的:TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
我用的是TIM_OCPolarity_Low,感觉用在SG90处好理解,也可以用TIM_OCPolarity_Hight,把数字在占空比内相减下就行了。
也可以把代码改成这样,main.c不变
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OCPolarity_Low
要注意TIM_OCMode_PWM1和TIM_OCMode_PWM2的区别,以及输出的极性高低:
现在假定TIM_OCInitTypeDef.TIM_OCPolarity = TIM_OCPolarity_High,则起始波形为高电位。
若TIM_OCInitTypeDef.TIM_OCMode = TIM_OCMode_PWM1时:
当计时器值小于比较器设定值时则TIMX输出脚此时输出有效高电位。
当计时器值大于或等于比较器设定值时则TIMX输出脚此时输出低电位。
若TIM_OCInitTypeDef.TIM_OCMode = TIM_OCMode_PWM2时:
当计时器值小于比较器设定值时则TIMX输出脚此时输出有效低电位。
当计时器值大于或等于比较器设定值时则TIMX输出脚此时输出高电位。
这样在高极性,PWM1下。在小于我们设定的值下输出的是高电平,大于我们设定的值后输出的是低电平。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180°角度伺服为例,那么对应的控制关系是:
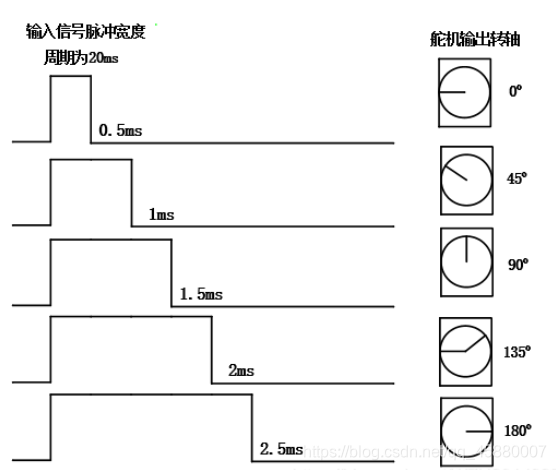 即在20ms PWM周期内输出相对应的高电平,可达到想要的角度。
即在20ms PWM周期内输出相对应的高电平,可达到想要的角度。
为了方便展示我我们把PWM周期设置为20ms
TIM3_PWM_Init(1999,719);//PWM周期为20ms = (7200*200)/72000000
TIM_Period 设置为1999,TIM_Prescaler设置为719.
即每计数1次时间为0.1us. 也可以用199 和 7199 不过计数一次要1us 周期不变。
这样是为了转动角度时能够取到相应的值。
主函数展示:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "oled.h"
#include "timer.h"
int i,delay_time=25;
unsigned char j = 50;
unsigned char flag = 1; //实现流畅正反转 但是刚开始时舵机位置还会突变
int main(void)
{
delay_init(); //延时函数初始化
uart_init(115200); //串口初始化为115200
LED_Init(); //初始化与LED连接的硬件接口
OLED_Init();
OLED_ShowString(0,0,"Welcome To STM32",16);
//TIM3_Int_Init(1999,7199);//Tout= (arr+1)(psc+1)/TCLK;
TIM3_PWM_Init(1999,719);//PWM周期为20ms = (7200*200)/72000000
while(1)
{
if(flag)
TIM_SetCompare2(TIM3, j++); //50 0度 250 180度
else
TIM_SetCompare2(TIM3, j--);
delay_ms(delay_time);
if(j>=250) { flag = 0;}
if(j<=51) { flag = 1;}
printf("%d\r\n",i++);
}
}
加一个flag 这样这个代码可以实现从0度到180度流畅的转动。
不过初始化舵机的位置还是不确定。
另外
TIM_SetCompare2(TIM3, j--);
TIM_SetCompare2 后面这个数字要与相应的通道对应。我这里用的是PB5,有刚开始的表可知是TIM3,CH2通道。
实际上是设置CCRx的值: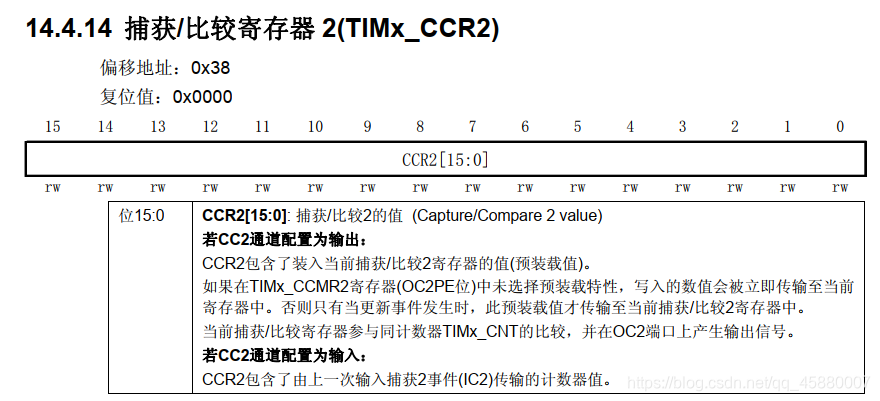

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









