







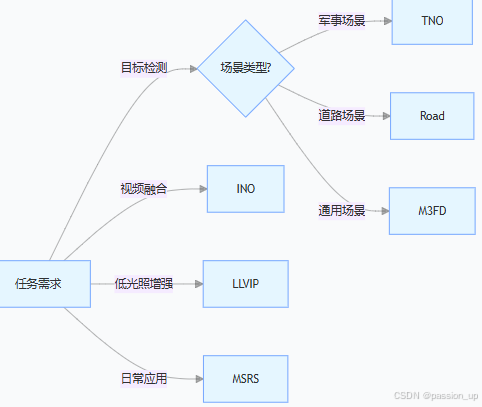
TNO、MSRS、M3FD 和 LLVIP 均为包含红外与可见光图像对的数据集,适用于不同场景下的多模态融合与目标检测研究。以下是它们的具体特点和应用场景:
MSRS: Multi-Spectral Road Scenarios for Practical Infrared and Visible Image Fusion
| 维度 | TNO | INO | Road | MSRS | M3FD | LLVIP |
|---|---|---|---|---|---|---|
| 场景复杂度 | 中等(军事目标) | 高(天气变化) | 中等(道路动态) | 低(校园静态) | 高(多样化场景) | 高(弱光噪声) |
| 时空特性 | 静态图像 | 视频序列 | 动态图像 | 静态图像 | 静态图像 | 动态图像 |
| 对齐精度 | 手动对齐(低) | 时空对齐(中) | 自动对齐(高) | 手动对齐(中) | 精确对齐(高) | 自动对齐(高) |
| 标注深度 | 无 | 无 | 无 | 无 | 无 | 无 |
| 数据规模 | 288 对 | 100 + 小时视频 | 221 对 | 1444 对 | 4200 对 | 16836 对 |
| 分辨率 | 256×256 | 1280×720 | 640×480 | 1024×768 | 1280×960 | 1920×1080 |
| 模态差异 | 低 | 中 | 中 | 低 | 高 | 高 |
HDO 数据集包含多种场景,包括高光和低光条件。此外,它还包含大量大小、密度和照明条件不同的行人和车辆物体。这对 HDO 数据集上的后续任务具有积极影响,例如融合、检测、跟踪和识别。 密度就是 比如 稀疏场景(<5 个目标 / 帧)到高密度场景(>50 个目标 / 帧),如交通枢纽。
考虑 退化场景(例如,强光、低照度、低源图像质量、非刚性失真)


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









