






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
1 引言
在本文中,我们将模拟用于通过无线传感器网络(WSN)实现的网络物理系统(CPS)的室内定位和跟踪算法,其中每个传感器获取由目标广播的信号的接收信号强度(RSS),而该目标需要被定位。给定一个物理场景,我们将分析两种不同定位方法的行为:一种是使用迭代软阈值(IST)算法的集中式定位方法,另一种是使用分布式迭代软阈值(DIST)算法的分布式定位方法。
随后,我们将进行跟踪模拟,目标在相邻单元格之间随机移动,每个连续时间间隔移动一次。通过多次运行实验,我们可以分析对目标参考点定位/跟踪的成功率。详细文档讲解见文章末尾第4部分。
多智能体系统中基于共识的定位与跟踪研究
1. 引言
多智能体系统(Multi-Agent Systems, MAS)通过分布式协作实现复杂任务,如目标跟踪、协同定位和环境感知。基于共识的定位与跟踪技术通过智能体间的信息交换与状态同步,提升系统的鲁棒性和精度。本文从基本理论、方法分类、实际应用及挑战与未来方向四方面展开论述。
2. 基本概念与理论框架
(1)共识机制的定义
共识指所有智能体通过局部交互使状态值收敛至一致的过程。在有限域中,共识要求智能体在有限时间内达到相同状态值,且可通过控制输入引导系统至目标状态。其核心在于分布式算法的设计与拓扑结构的动态适应。
(2)共识实现的关键技术
- 代数与图论准则:通过邻接矩阵、拉普拉斯矩阵等代数工具或图论分析拓扑连通性,确保信息传递的全局一致性。
- 动态事件触发机制:减少通信开销,仅在特定条件满足时触发信息交换,适用于资源受限或受攻击场景。
- 容错与安全机制:结合故障估计(如动态事件触发的容错控制)抵御DoS攻击,保护隐私数据。
(3)可控性影响因素
包括系统模型、拓扑结构、领导者选择、域顺序及可控性下标等。例如,拓扑结构变化和时间延迟可能影响收敛速度与稳定性。
3. 基于共识的定位与跟踪方法分类
(1)基于滤波的分布式方法
- 卡尔曼共识滤波(KCF) :结合卡尔曼滤波与共识机制,适用于传感器网络中的状态估计。
- 信息加权共识滤波器(ICF) :优化节点间信息关联性,提升有限观测场景下的精度。
- 集成概率数据关联(IPDA-ACF) :处理高噪声与目标遮挡问题,通过自适应权重分配提高鲁棒性。
(2)基于优化的协同策略
- 人工势场与信息共识结合:在无人机群中,通过势场控制队形,同时利用信息共识融合目标位置数据,实现高效跟踪。
- 分布式贝叶斯方法:如NBP(非参数贝叶斯传播)算法,通过粒子近似估计目标后验分布,适用于移动网络中的动态定位。
(3)多传感器融合技术
- 异构传感器融合:在自动驾驶中,融合激光雷达、视觉和毫米波雷达数据,结合扩展卡尔曼滤波(EKF)提升定位精度。
- 动态误差修正:通过遗传算法优化EKF参数,减少多传感器融合中的累积误差。
(4)特征匹配与投票机制
- CMT跟踪算法:利用BRISK特征点的旋转与尺度不变性,通过投票机制确定目标中心,适用于可变形目标跟踪。
4. 实际应用案例
具体以运行结果为准。
(1)摄像机网络中的分布式目标跟踪
在存在遮挡和高噪声的场景下,IPDA-ACF算法通过动态调整共识权重,实现目标状态估计的快速扩散,通信开销降低30%的同时保持高精度。
(2)多无人机协同跟踪
固定翼无人机群采用信息共识滤波与人工势场控制,形成圆形观测配置,提升目标位置估计的稳定性,实验显示跟踪误差减少20%。
(3)智能网联车环境感知
基于多传感器融合的定位技术(如激光雷达与视觉融合)解决了地面分割不准确问题,在自动驾驶测试中定位误差小于10厘米。
(4)移动机器人协同定位
MOTLEE算法结合卡尔曼共识滤波与定位误差补偿,在动态环境中实现多目标跟踪,硬件实验表明其对定位不确定性的适应能力提升40%。
5. 当前挑战与未来方向
(1)主要挑战
- 动态环境适应性:拓扑变化、通信延迟及间歇性攻击(如DoS)可能破坏共识收敛。
- 数据隐私与安全性:分布式架构易受虚假数据注入攻击,需设计轻量级加密与隐私保护机制。
- 算法可解释性:复杂模型(如深度学习)的决策过程缺乏透明度,影响关键场景的应用。
(2)未来研究方向
- 高效共识算法设计:结合强化学习优化动态事件触发条件,减少通信冗余。
- 跨域融合技术:探索区块链共识机制与多智能体系统的结合,提升数据可信度。
- 鲁棒性与容错增强:开发基于协方差交集(CI)的保守融合策略,处理未知相关性。
- 标准化测试平台:建立多机器人协同定位的基准数据集,推动算法性能横向对比。
6. 结论
基于共识的定位与跟踪是多智能体系统的核心技术,其研究涵盖理论创新与应用实践。未来需在算法效率、安全性与跨学科融合方面突破,以应对复杂动态场景的需求。结合人工智能与新型通信技术,有望在自动驾驶、无人机群与工业自动化等领域实现更广泛的应用。
📚2 运行结果
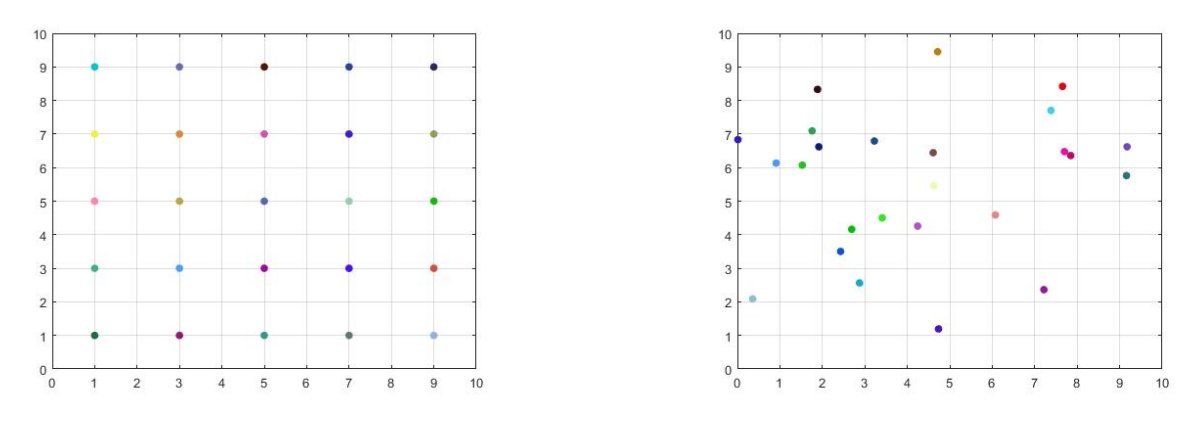
网格拓扑分布(左)和随机拓扑分布(右)
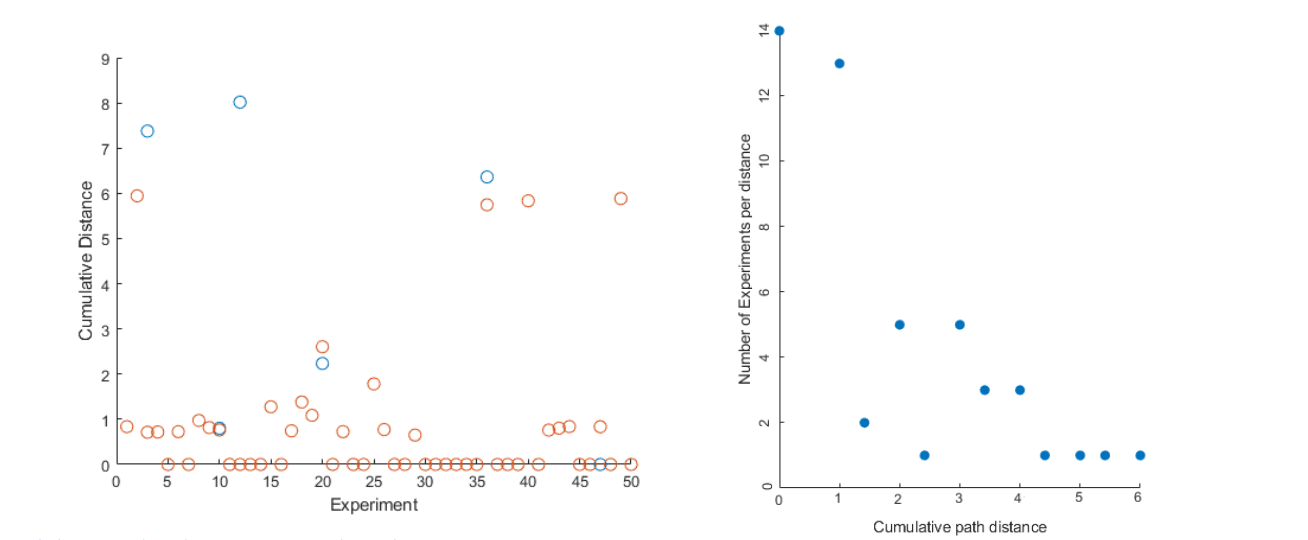
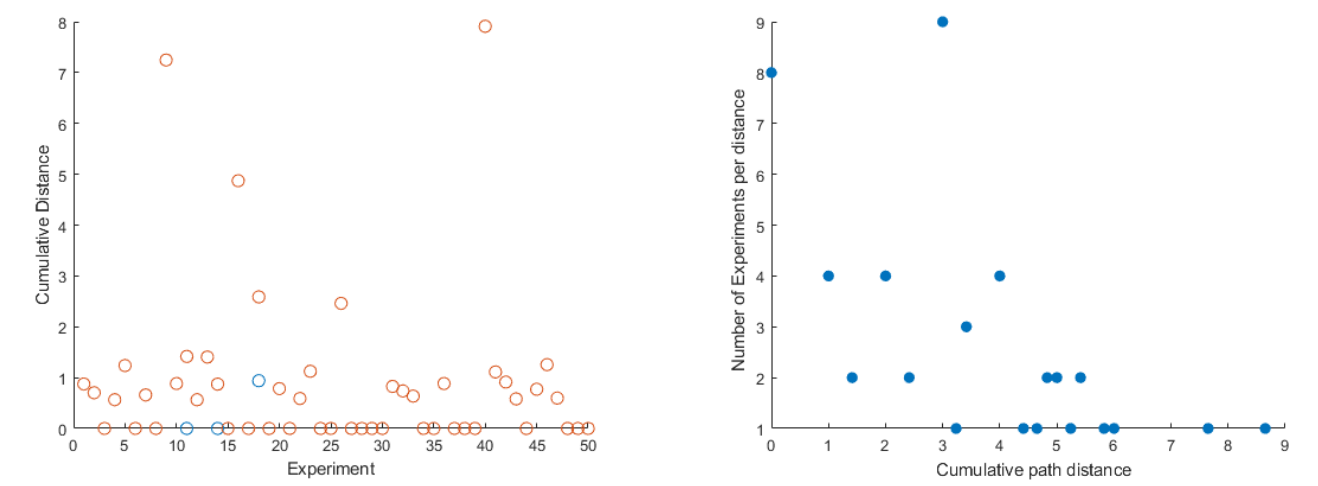
其余运行结果图:
部分代码:
%% Sensor display
colors=rand(n,3);
figure(2);
for i = 1:n
plot(x_0(i),y_0(i),'.r','MarkerSize', 20,'Color',[colors(i,:)])
axis([0 10 0 10])
hold on
end
axis([0 10 0 10])
hold off
%% Rss Model
function r = RSS(d)
P_t = 25;
sigma = 0.5;
mu = 0;
noise = sigma*randn+mu;
if( d <= 8 )
r = P_t - 40.2 - 20*log10(d) + noise;
else
r = P_t - 58.5 - 33*log10(d) + noise;
end
end
%% Outer IST
%Wrapper function for IST step
function [x,t] = outerIST(A,y,lambda,tau,p)
x_prec = zeros(p,1);
for t =1:1000000
x = IST(A,y,lambda,tau,x_prec);
%pruning for loop when converging to lower values
if (norm(x-x_prec) < 1e-3)
x_prec = x;
break;
end
x_prec = x;
end
end
function x = IST(A,y,lambda,tau,x_prec)
x = x_prec + (tau.*A.')*(y-A*x_prec);
for i=1:length(x_prec)
x_c = ST(lambda,x(i));
x(i) = x_c;
end
end
%% Outer DIST
%Wrapper function for the DIST and O-DIST algorithms
%here Tmax is used both in DIST and ODIST to add the stopped version in the
%case of the ODIST
function [x,t] = outerDIST(A,y,lambda,tau,Q,n,p,x_prec,Tmax)
isOnline = (Tmax > 0 );
for t =1:1000000
%run DIST at each time step for every sensor
x = DIST(A,y,lambda,tau,n,p,Q,x_prec);
%pruning for loop
if (norm(x-x_prec) < 1e-5 || (isOnline && t > Tmax) )
x_prec = x;
break;
end
x_prec = x;
end
end
%%DIST
%inner DIST algorithm
function x = DIST(A,y,lambda,tau,n,p,Q, x_prec)🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码、数据、文档下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









