






SPI接口编程之回环测试
SPI简介
SPI 是串行外设接口(Serial Peripheral Interface)的缩写。是Motorola 公司推出的一种同步串行接口技术,是一种高速的,全双工,同步的通信总线。通常由一个主模块和一个或多个从模块组成,主模块选择一个从模块进行同步通信,从而完成数据的交换。SPI 是一个环形结构,通信时需要至少4 根线。它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选),一个主机和一个从机的一般连接方式如下图所示。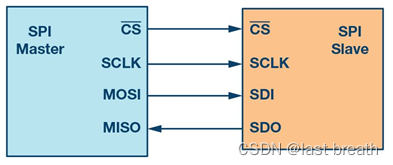
SPI 优点:支持全双工通信、通信简单、数据传输速率快。 SPI 缺点:没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC 总线协议比较在数据可靠性上有一定的缺陷。
SPI传输模式
SPI 通信有4 种不同的模式,不同的从设备可能在出厂时就是配置为某种模式,这是不能改变的。但我们的通信双方必须是工作在同一模式下,所以我们可以对我们的主设备的SPI 模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来控制我们主设备的通信模式。
CPOL(时钟的极性):规定SPI 总线空闲时,时钟是高电平还是低电平。 CPHA(时钟的相位):规定SPI 设备是在上升沿还是下降沿触发采样数据。
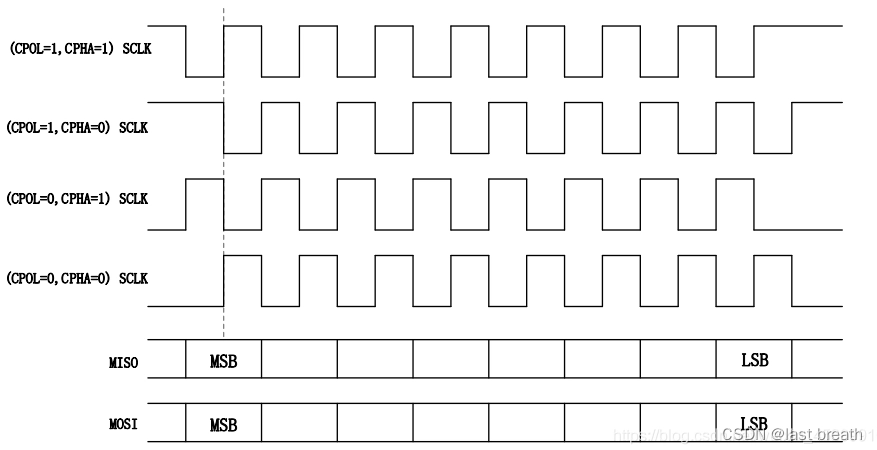
模式0:CPOL=0,CPHA=0。SCLK 串行时钟线空闲是低电平。数据在SCLK 的上升沿被采样,在SCLK 下降沿切换。
模式1:CPOL=0,CPHA=1。SCLK 串行时钟线空闲是低电平。数据在SCLK 的下降沿被采样,在SCLK 上升沿切换。
模式2:CPOL=1,CPHA=0。SCLK 串行时钟线空闲是高电平。数据在SCLK 的下降沿被采样,在SCLK 上升沿切换。
模式3:CPOL=1,CPHA=1。SCLK 串行时钟线空闲是高电平。数据在SCLK 的上升沿被采样,在SCLK 下降沿切换。
SPI数据交换
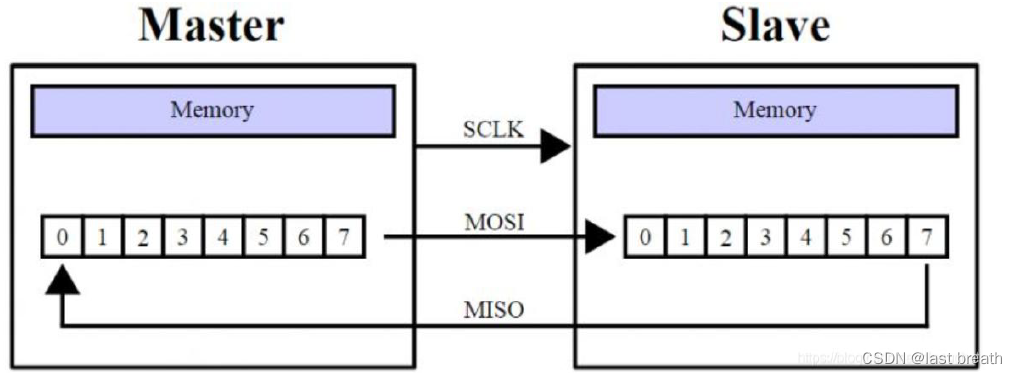
想要在主从设备间通过SPI 来交换数据,从设备必须能够被主设备访问。所以主设备需要访问从设备,需要拉低从设备的NSS(片选)引脚,进行片选。
SPI 之间的数据传输又叫做数据交换,SPI 不同于其他协议,SPI 在通信的时候,两边各有一个移位寄存器。在进行数据传输的时候,其实是一个数据的交换,数据交换过程如下图所示。
使能开发板SPI驱动
在使能imx6ull的SPI驱动之前,我们需要对该分区进行挂载。接下来先对相关知识进行学习了解。
eMMC分区
一般 emmc 在出厂时已经进行了物理分区,分为 user 分区、boot0 分区、boot1 分区和 rpmb 分区,对于普通用户来说,我们可以忽略 boot0、boo1 和 rpmb 分区,直接对 user 分区进行逻辑分区,将 uboot、内核和根文件系统存放于 user 分区中。
eMMC 在内部对 Flash Memory 划分了几个主要区域,如下图所示:
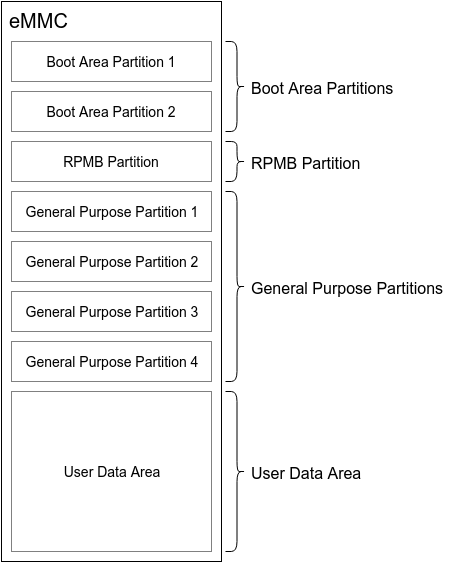
BOOT Area Partition 1 & 2
此分区主要是为了支持从 eMMC 启动系统而设计的。该分区的数据,在 eMMC 上电后,可以通过很简单的协议就可以读取出来。同时,大部分的 SOC 都可以通过 GPIO 或者 FUSE 的配置,让 ROM 代码在上电后,将 eMMC BOOT 分区的内容加载到 SOC 内部的 SRAM 中执行。
RPMB Partition
RPMB 是 Replay Protected Memory Block的简称,它通过 HMAC SHA-256 和 Write Counter 来保证保存在 RPMB 内部的数据不被非法篡改。在实际应用中,RPMB 分区通常用来保存安全相关的数据,例如指纹数据、安全支付相关的密钥等。
General Purpose Partition 1~4
此区域则主要用于存储系统或者用户数据。 General Purpose Partition 在芯片出厂时,通常是不存在的,需要主动进行配置后,才会存在。
User Data Area
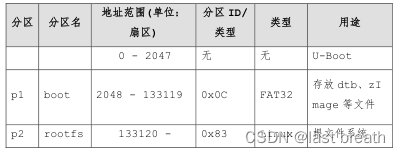
此区域则主要用于存储系统和用户数据。User Data Area 通常会进行再分区,例如在本系统中,对于 8G eMMC user 分区如下:
在给系统挂载了新设备后,如果重启系统我们会发现找不到设备;但是使用fdisk -l可以看到存储空间,说明设备还在。这是因为关机后,挂载已经自动卸载掉了。我们当然可以手动再次将其挂载,但如果每次重启都需要这样手动操作会很不方便;因此我们可以利用自动挂载,这样系统每次开机的时候就可以自动将磁盘挂载上去了。
/etc/fstab是用来存放文件系统的静态信息的文件。位于/etc/目录下,可以用命令less /etc/fstab 来查看,如果要修改的话,则用命令 vi /etc/fstab 来修改。
当系统启动的时候,系统会自动地从这个文件读取信息,并且会自动将此文件中指定的文件系统挂载到指定的目录。下面我来介绍如何在此文件下填写信息。
一个简单的 /etc/fstab,使用内核名称标识磁盘:
/etc/fstab
# <file system> <dir> <type> <options> <dump> <pass>
tmpfs /tmp tmpfs nodev,nosuid 0 0
/dev/sda1 / ext4 defaults,noatime 0 1
/dev/sda2 none swap defaults 0 0
/dev/sda3 /home ext4 defaults,noatime 0 2
/etc/fstab 文件包含了如下字段,通过空格或 Tab 分隔:
<file system> <dir> <type> <options> <dump> <pass>
- - 要挂载的分区或存储设备.
-
- 的挂载位置。 - - 要挂载设备或是分区的文件系统类型,支持许多种不同的文件系统:
ext2,ext3,ext4,reiserfs,xfs,jfs,smbfs,iso9660,vfat,ntfs,swap及auto。 设置成auto类型,mount 命令会猜测使用的文件系统类型,对 CDROM 和 DVD 等移动设备是非常有用的。 - - 挂载时使用的参数,注意有些mount 参数是特定文件系统才有的。一些比较常用的参数有:
auto- 在启动时或键入了mount -a命令时自动挂载。noauto- 只在你的命令下被挂载。exec- 允许执行此分区的二进制文件。noexec- 不允许执行此文件系统上的二进制文件。ro- 以只读模式挂载文件系统。rw- 以读写模式挂载文件系统。user- 允许任意用户挂载此文件系统,若无显示定义,隐含启用noexec,nosuid,nodev参数。users- 允许所有 users 组中的用户挂载文件系统.nouser- 只能被 root 挂载。owner- 允许设备所有者挂载.sync- I/O 同步进行。async- I/O 异步进行。dev- 解析文件系统上的块特殊设备。nodev- 不解析文件系统上的块特殊设备。suid- 允许 suid 操作和设定 sgid 位。这一参数通常用于一些特殊任务,使一般用户运行程序时临时提升权限。nosuid- 禁止 suid 操作和设定 sgid 位。noatime- 不更新文件系统上 inode 访问记录,可以提升性能(参见 atime 参数)。nodiratime- 不更新文件系统上的目录 inode 访问记录,可以提升性能(参见 atime 参数)。relatime- 实时更新 inode access 记录。只有在记录中的访问时间早于当前访问才会被更新。(与 noatime 相似,但不会打断如 mutt 或其它程序探测文件在上次访问后是否被修改的进程。),可以提升性能(参见 atime 参数)。flush-vfat的选项,更频繁的刷新数据,复制对话框或进度条在全部数据都写入后才消失。defaults- 使用文件系统的默认挂载参数,例如ext4的默认参数为:rw,suid,dev,exec,auto,nouser,async.- dump 工具通过它决定何时作备份. dump 会检查其内容,并用数字来决定是否对这个文件系统进行备份。 允许的数字是 0 和 1 。0 表示忽略, 1 则进行备份。大部分的用户是没有安装 dump 的 ,对他们而言 应设为 0。
- fsck 读取 的数值来决定需要检查的文件系统的检查顺序。允许的数字是0, 1, 和2。 根目录应当获得最高的优先权 1, 其它所有需要被检查的设备设置为 2. 0 表示设备不会被 fsck 所检查。
文件系统标识
在 /etc/fstab配置文件中你可以以三种不同的方法表示文件系统:内核名称、UUID 或者 label。使用 UUID 或是 label 的好处在于它们与磁盘顺序无关。如果你在 BIOS 中改变了你的存储设备顺序,或是重新拔插了存储设备,或是因为一些 BIOS 可能会随机地改变存储设备的顺序,那么用 UUID 或是 label 来表示将更有效。参见 持久化块设备名称 。
要显示分区的基本信息请运行:
$ lsblk -f
NAME FSTYPE LABEL UUID MOUNTPOINT
sda
├─sda1 ext4 Arch_Linux 978e3e81-8048-4ae1-8a06-aa727458e8ff /
├─sda2 ntfs Windows 6C1093E61093B594
└─sda3 ext4 Storage f838b24e-3a66-4d02-86f4-a2e73e454336 /media/Storage
sdb
├─sdb1 ntfs Games 9E68F00568EFD9D3
└─sdb2 ext4 Backup 14d50a6c-e083-42f2-b9c4-bc8bae38d274 /media/Backup
sdc
└─sdc1 vfat Camera 47FA-4071 /media/Camera
内核名称
你可以使用 fdisk -l 来获得内核名称,前缀是 dev.
标签
注意: 使用这一方法,每一个标签必须是唯一的.
要显示所有设备的标签,可以使用 lsblk -f 命令。在 /etc/fstab 中使用 LABEL= 作为设备名的开头 :
/etc/fstab
# <file system> <dir> <type> <options> <dump> <pass>
tmpfs /tmp tmpfs nodev,nosuid 0 0
LABEL=Arch_Linux / ext4 defaults,noatime 0 1
LABEL=Arch_Swap none swap defaults 0 0
UUID
所有分区和设备都有唯一的 UUID。它们由文件系统生成工具 (mkfs.*) 在创建文件系统时生成。
lsblk -f 命令将显示所有设备的 UUID 值。/etc/fstab 中使用 UUID= 前缀:
/etc/fstab
# <file system> <dir> <type> <options> <dump> <pass>
tmpfs /tmp tmpfs nodev,nosuid 0 0
UUID=24f28fc6-717e-4bcd-a5f7-32b959024e26 / ext4 defaults,noatime 0 1
UUID=03ec5dd3-45c0-4f95-a363-61ff321a09ff /home ext4 defaults,noatime 0 2
UUID=4209c845-f495-4c43-8a03-5363dd433153 none swap defaults
Linux中的根目录以外的文件要想被访问,需要将其“关联”到根目录下的某个目录来实现,这种关联操作就是“挂载”,这个目录就是“挂载点”,解除此关联关系的过程称之为“卸载”。
注意:“挂载点”的目录需要以下几个要求:
目录事先存在,可以用mkdir命令新建目录
挂载点目录不可被其他进程使用到
挂载点下原有文件将被隐藏。挂载点下最好是空的
根目录必须优先于其他挂载点
挂载点必须为已经存在的目录
卸载时必须保证当前磁盘没有发生读写操作
mount命令的两个常用用法:
mount [-l]
#查询系统中已经挂载的设备,-l 会显示卷标名称,也可以直接查看/etc/mtab文件
mount –a
#把fstab里的命令执行一次,当然如果有配置错误,也会报错,所以可以起到一定的检查作用
#依据配置文件/etc/fstab 的内容,自动挂载
挂载分区
挂载之前先创建文件夹,在哪里创建都可以。
cd /run
mkdir media
cd media
mkdir mmcblk1p1

挂载分区:
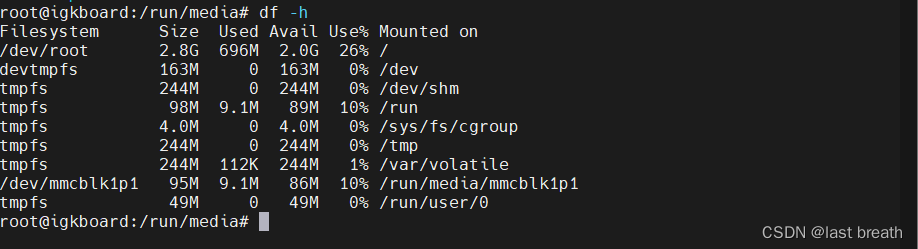
mount /dev/mmcblk1p1 /run/media/mmcblk1p1
检查:
df -h
查看分区对应的类型
blkid /dev/mmcblk1p1

修改fstab文件
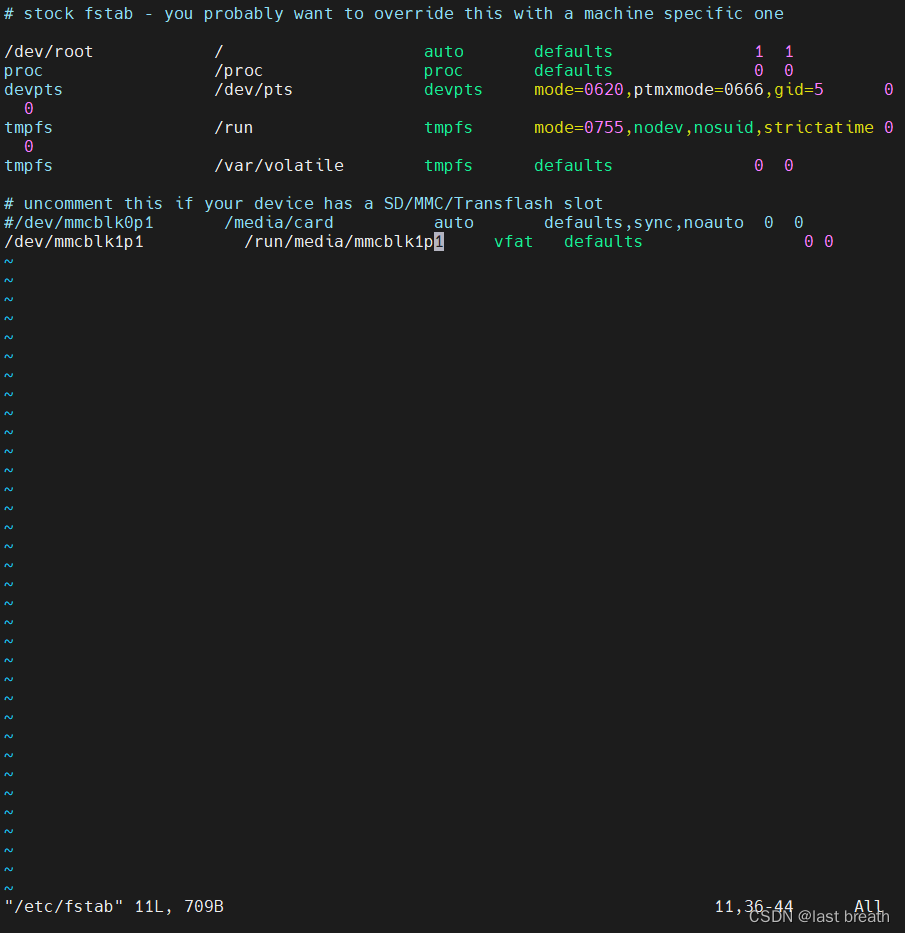
vi /etc/fstab
在最后添加
/dev/mmcblk1p1 /run/media/mmcblk1p1 vfat defaults 0 0
然后执行
mount -a
并检查:
df -h
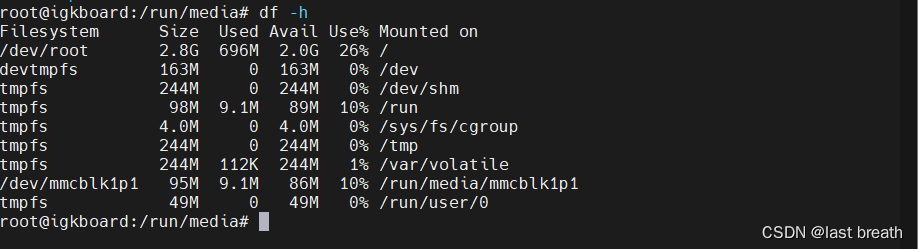
重启后我们就可以访问该分区了。
使能SPI
查看开发板底板原理图和其40pin扩展口可以知道,开发板上可以使用的有1路完整的SPI1总线管脚,其中
GPIO03_IO25 -----> ECSPI1_SCLK
GPIO03_IO26 -----> ECSPI1_SS0
GPIO03_IO27 -----> ECSPI1_MOSI
GPIO03_IO28 -----> ECSPI1_MISO
想要使能40pin扩展口的SPI1的话,需要修改开发板上的DTOverlay配置文件,添加该管脚对SPI1的支持,具体修改具体方法为修改 eMMC 启动介质的 boot 分区下的 config.txt 文件,如下所示。
root@igkboard:~# vi /run/media/mmcblk1p1/config.txt
# Enable SPI overlay, SPI1 conflict with UART8(NB-IoT/4G module)
dtoverlay_spi=1
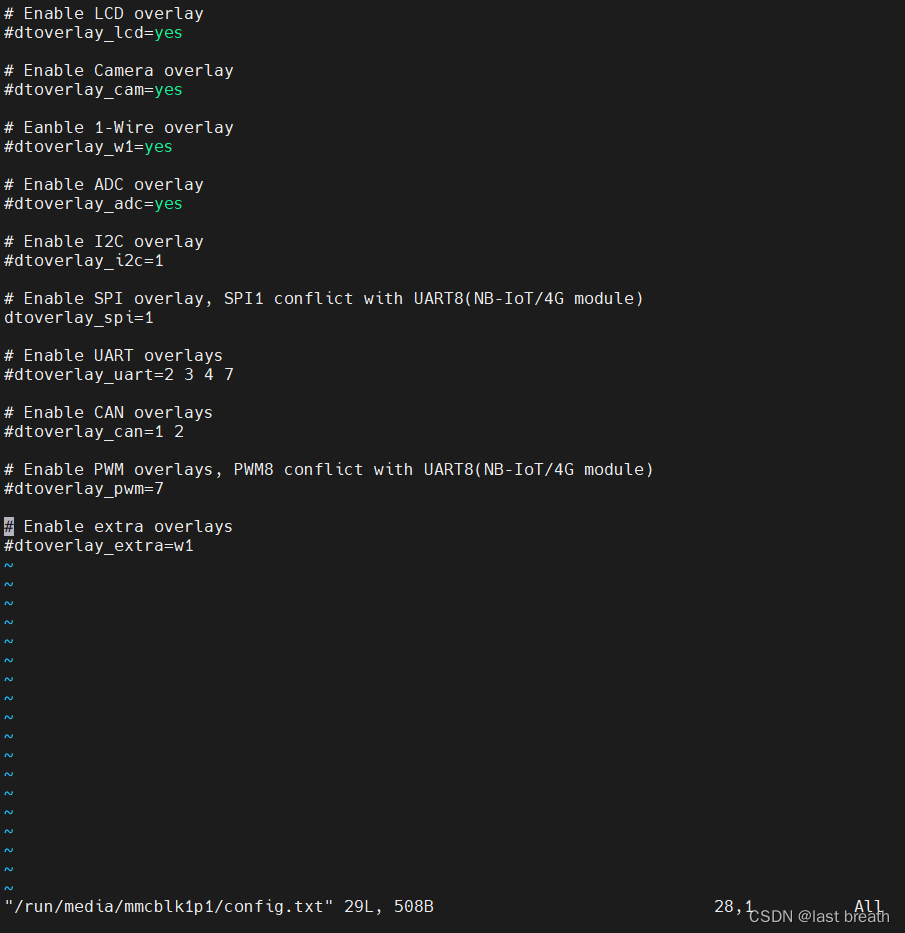
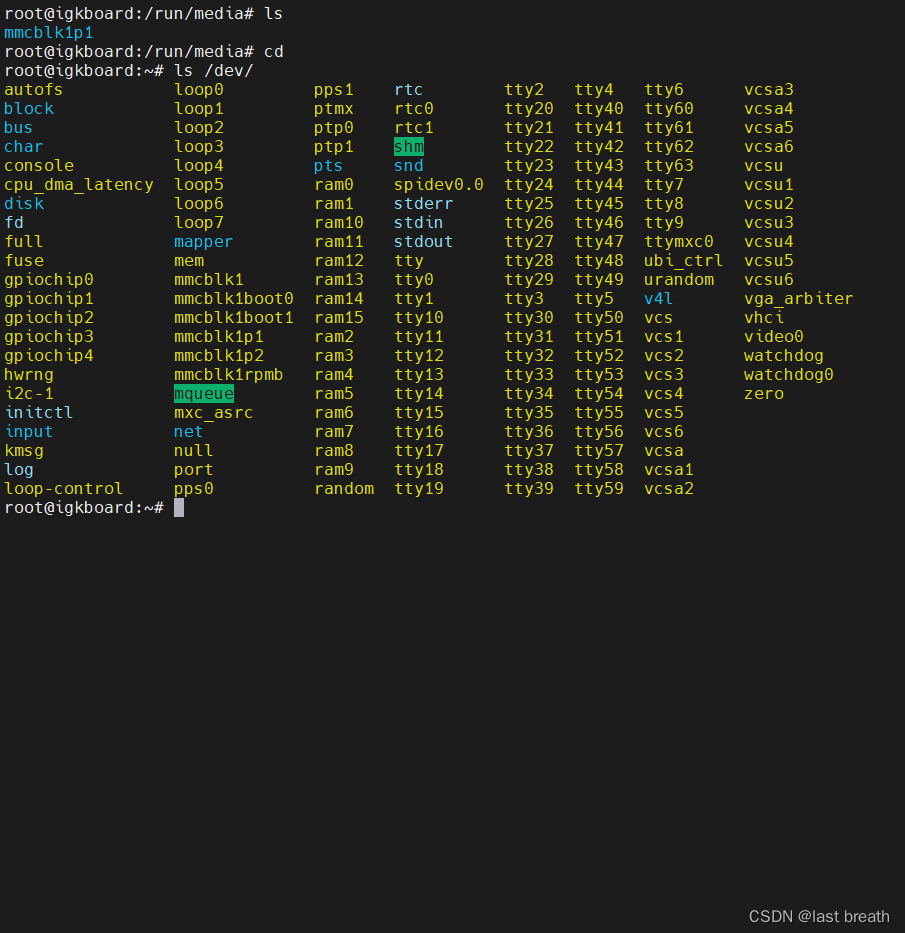
修改完成后重启系统,系统启动时将会自动加载 SPI 协议驱动。查看/dev下是否存在spi设备节点,已验证spi驱动是否加载
SPI的回环测试
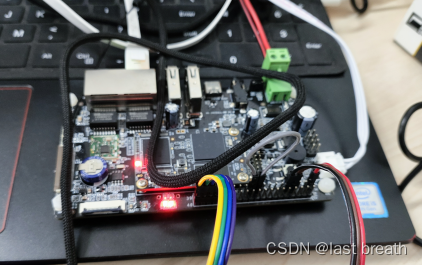
物理连接说明
回环测试,找到IGKBoard的SPI1的MISO和MOSI管脚,使用杜邦线或跳线帽短接即可,如下图所示
实物连接图如下。
回环测试示例
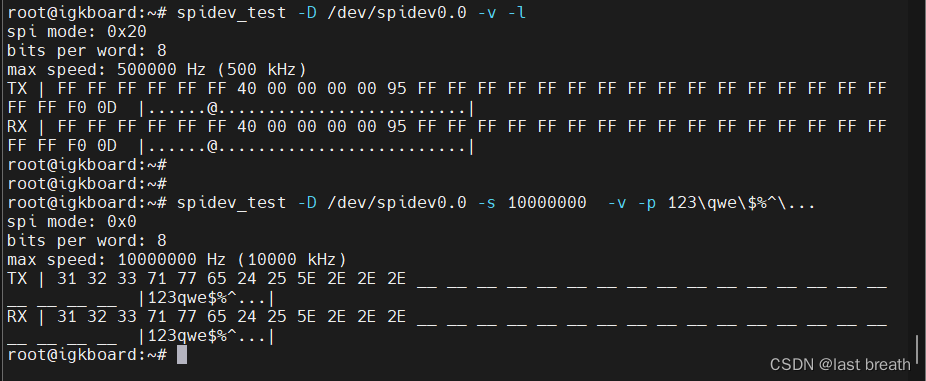
我们的IGKBoard开发板的系统中已经安装好了spidev-test,所以可以使用该命令行工具进行回环测试,下面我们开始看看该命令的帮助信息:
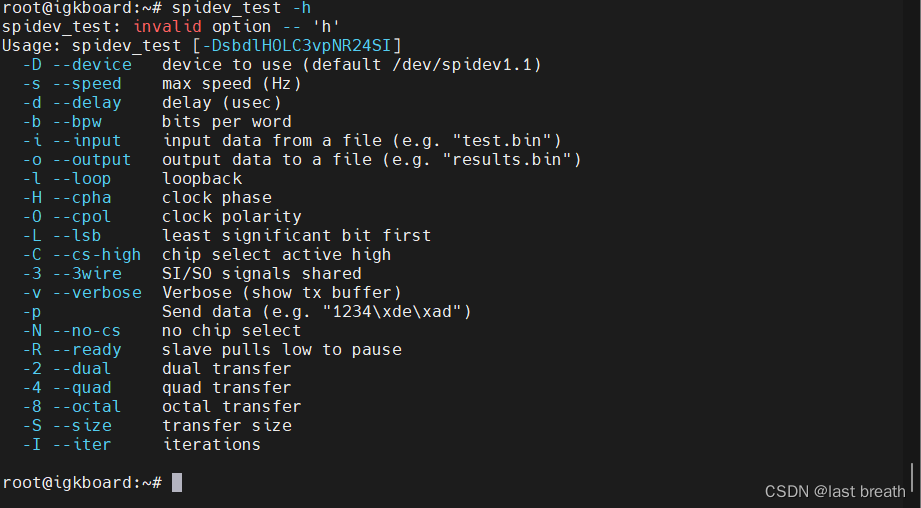
这个工具使用时候,很多选项都是由缺省值的,比如默认指定的设备是spidev1.1 ,对于回环测试我们需要知道几个必须的参数
-
-D 指定spi设备节点
-s 设置spi传输速率,可以测试回环测试中最大传输速度
-v 打开发送接收回显,用于查看详细数据发送接收情况
-l 直接进行回环测试
-p 指定发送数据
使用示例如下
SPI编程实现数据传输
SPI相关数据结构
应用程序空间需要从spi设备传输数据时候,每组数据元素就是 struct spi_ioc_transfer 结构体类型,该结构体定义如下:
//Linux内核源码: include/uapi/linux/spi/spidev.h
//应用编程头文件: /usr/include/linux/spi/spi/spidev.h
struct spi_ioc_transfer {
__u64 tx_buf; //发送数据缓存
__u64 rx_buf; //接收数据缓存
__u32 len; //数据长度
__u32 speed_hz; //通讯速率
__u16 delay_usecs; //两个spi_ioc_transfer之间的延时,微秒
__u8 bits_per_word; //数据长度
__u8 cs_change; //取消选中片选
__u8 tx_nbits; //单次数据宽度(多数据线模式)
__u8 rx_nbits; //单次数据宽度(多数据线模式)
__u8 word_delay_usecs;
__u8 pad;
/* If the contents of 'struct spi_ioc_transfer' ever change
* incompatibly, then the ioctl number (currently 0) must change;
* ioctls with constant size fields get a bit more in the way of
* error checking than ones (like this) where that field varies.
*
* NOTE: struct layout is the same in 64bit and 32bit userspace.
*/
};
在编写应用程序时还需要使用ioctl函数设置spi相关配置,其函数原型如下
#include <sys/ioctl.h>
int ioctl(int fd, unsigned long request, ...);
| SPI_IOC_RD_MODE | 设置读取SPI模式 |
|---|---|
| SPI_IOC_WR_MODE | 设置写入SPI模式 |
| – | – |
| SPI_IOC_RD_LSB_FIRST | 设置SPI读取数据模式(LSB先行返回1) |
| – | – |
| SPI_IOC_WR_LSB_FIRST | 设置SPI写入数据模式。(0:MSB,非0:LSB) |
| – | – |
| SPI_IOC_RD_BITS_PER_WORD | 设置SPI读取设备的字长 |
| – | – |
| SPI_IOC_WR_BITS_PER_WORD | 设置SPI写入设备的字长 |
| – | – |
| SPI_IOC_RD_MAX_SPEED_HZ | 设置读取SPI设备的最大通信频率。 |
| – | – |
| SPI_IOC_WR_MAX_SPEED_HZ | 设置写入SPI设备的最大通信速率 |
| – | – |
| SPI_IOC_MESSAGE(N) | 一次进行双向/多次读写操作 |
编写测试程序
使用上述系统调用和相关命令,设计一个自定义速率和数据的spi回环测试测试程序:
/*********************************************************************************
* Copyright: (C) 2024 chenyujiang<263136290@qq.com>
* All rights reserved.
*
* Filename: spi_loop_test.c
* Description: This file is used to test spi_loop_test
*
* Version: 1.0.0(02/29/2024)
* Author: chenyujiang <263136290@qq.com>
* ChangeLog: 1, Release initial version on "02/29/2024 07:53:44 PM"
*
********************************************************************************/
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <unistd.h>
#include <string.h>
#include <errno.h>
#include <getopt.h>
#include <libgen.h>
#include <fcntl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <linux/spi/spidev.h>
#define PROG_VERSION "1.0.0"
typedef struct spi_ctx_s
{
int fd;
char dev[64];
uint8_t bits;
uint32_t delay;
uint32_t mode;
uint32_t speed;
}spi_ctx_t;
static int spi_init(spi_ctx_t *spi_ctx);
static int transfer(spi_ctx_t *spi_ctx,uint8_t const *tx,uint8_t const *rx,size_t len);
static void program_usage(char *progname)
{
printf("Usage: %s [OPTION]...\n",progname);
printf("%s is a program to test IGKBoard loop spi\n",progname);
printf("\nMandatory arguments to long options are mandatory for short options too:\n");
printf("-d[device] Specify SPI device, such as: /dev/spidev0.0\n");
printf("-s[speed] Max speed(Hz), such as: -s 500000\n");
printf("-p[print] Send data, such as: -p 1234/xde/xad\n");
printf("\n%s Version %s\n",progname,PROG_VERSION);
}
int main(int argc,char *argv[])
{
int ret;
spi_ctx_t spi_ctx;
char *spi_dev = "/dev/spidev0.0";
uint32_t spi_speed = 500000;
char *input_tx = "Hello";
uint8_t rx_buffer[100];
int opt;
char *progname=NULL;
struct option long_options[]={
{"device",required_argument,NULL, 'd'},
{"speed", required_argument,NULL,'s'},
{"print",required_argument,NULL,'p'},
{"help",no_argument,NULL,'h'},
{NULL,0,NULL,0}
};
progname = (char *)basename(argv[0]);
while((opt = getopt_long(argc,argv,"d:s:p:h",long_options,NULL)) != -1)
{
switch(opt)
{
case 'd':
spi_dev = optarg;
break;
case 's':
spi_speed = atoi(optarg);
break;
case 'p':
input_tx = optarg;
break;
case 'h':
program_usage(progname);
return 0;
}
}
if(0 == spi_speed || !input_tx)
{
program_usage(progname);
return 0;
}
memset(&spi_ctx,0,sizeof(spi_ctx_t));
strncpy(spi_ctx.dev,spi_dev,sizeof(spi_ctx.dev));
spi_ctx.bits = 8;
spi_ctx.delay = 100;
spi_ctx.mode = SPI_MODE_2;
spi_ctx.speed = spi_speed;
if(spi_init(&spi_ctx) < 0)
{
printf("spi_init error\n");
return -1;
}
printf("spi [dev %s][fd = %d] init successfully\n",spi_ctx.dev,spi_ctx.fd);
if(transfer(&spi_ctx,input_tx,rx_buffer,strlen(input_tx)) < 0)
{
printf("spi transfer error\n");
return -2;
}
printf("tx_buffer: | %s |\n",input_tx);
printf("rx_buffer: | %s |\n",rx_buffer);
return 0;
}
int spi_init(spi_ctx_t *spi_ctx)
{
int ret;
spi_ctx->fd = open(spi_ctx->dev,O_RDWR);
if(spi_ctx->fd < 0)
{
printf("Open %s error\n",spi_ctx->dev);
return -1;
}
//set SPI receive and send work mode
ret = ioctl(spi_ctx->fd,SPI_IOC_RD_MODE,&spi_ctx->mode);
if(ret < 0)
{
printf("ERROR: SPI set SPI_IOC_RD_MODE [0x%x] failure: %s\n",spi_ctx->mode,strerror(errno));
goto fd_close;
}
ret = ioctl(spi_ctx->fd,SPI_IOC_WR_MODE,&spi_ctx->mode);
if(ret < 0)
{
printf("ERROR: SPI set SPI_IOC_WR_MODE [0x%x] failure: %s\n",spi_ctx->mode,strerror(errno));
goto fd_close;
}
//set SPI receive and send bits/word
ret = ioctl(spi_ctx->fd,SPI_IOC_RD_BITS_PER_WORD,&spi_ctx->bits);
if(ret < 0)
{
printf("ERROR: SPI set SPI_IOC_RD_BITS_PER_WORD [%d] failure: %s\n",spi_ctx->bits,strerror(errno));
goto fd_close;
}
ret = ioctl(spi_ctx->fd,SPI_IOC_WR_BITS_PER_WORD,&spi_ctx->bits);
if(ret < 0)
{
printf("ERROR: SPI set SPI_IOC_WR_MODE [%d] failure: %s\n",spi_ctx->bits,strerror(errno));
goto fd_close;
}
//set SPI max work speed
ret = ioctl(spi_ctx->fd,SPI_IOC_WR_MAX_SPEED_HZ,&spi_ctx->speed);
if(ret < 0)
{
printf("ERROR: SPI set SPI_IOC_WR_MAX_SPEED_HZ [%d] failure: %s\n",spi_ctx->speed,strerror(errno));
goto fd_close;
}
ret = ioctl(spi_ctx->fd,SPI_IOC_RD_MAX_SPEED_HZ,&spi_ctx->speed);
if(ret < 0)
{
printf("ERROR: SPI set SPI_IOC_WR_MODE [%d] failure: %s\n",spi_ctx->speed,strerror(errno));
goto fd_close;
}
printf("spi mode: 0x%x\n",spi_ctx->mode);
printf("bits per word: %d\n",spi_ctx->bits);
printf("max speed: %dHz(%dHz)\n",spi_ctx->speed,spi_ctx->speed/1000);
return spi_ctx->fd;
fd_close:
close(spi_ctx->fd);
return -1;
}
int transfer(spi_ctx_t *spi_ctx, uint8_t const *tx,uint8_t const *rx,size_t len)
{
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = spi_ctx->delay,
.speed_hz = spi_ctx->speed,
.bits_per_word = spi_ctx->bits,
};
//send a set of data
if(ioctl(spi_ctx->fd, SPI_IOC_MESSAGE(1), &tr) < 0)
{
printf("ERROR: SPI transfer failure: %s\n",strerror(errno));
return -1;
}
return 0;
}
编写Makefile如下
CC=arm-linux-gnueabihf-gcc
APP_NAME=spi_loop_test
all:clean
@${CC} ${APP_NAME}.c -o ${APP_NAME}
clean:
@rm -f ${APP_NAME}
交叉编译测试运行
在ubuntu下的相关源码路径下执行make命令将会编译源码生成ARM开发板上的可执行文件。

现在我们在开发板上通过 tftp 命令 或其它方式将编译生成的测试程序下载到开发板上并执行。
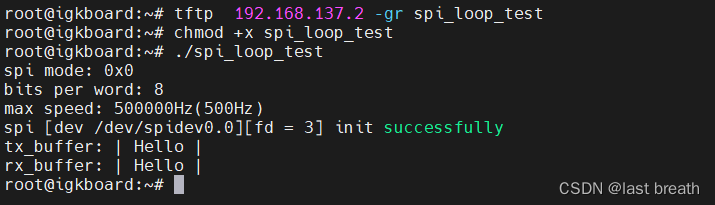
可以使用 -h选项查看用法,不带任何选项参数,程序使用默认参数和数据进行发送,默认参数设备是**/dev/spidev0.0**,速率是500KHz,发送的数据是Hello,通过检查rx和rx的buffer相同,证明数据回环发送成功。














 2911
2911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









