






Proteus 8 Professional发生关键仿真错误(疑似中文路径导致)
在软件仿真时出现错误 显示好多红色代码 疑似之前把电脑名命名为中文了
所以缓存路径也是中文 导致Proteus 8 Professional发生关键仿真错误
在以后安装类似软件时都会因为中文路径造成出错
建议要是不嫌麻烦一不做二不休重装系统以绝后患!
解决办法
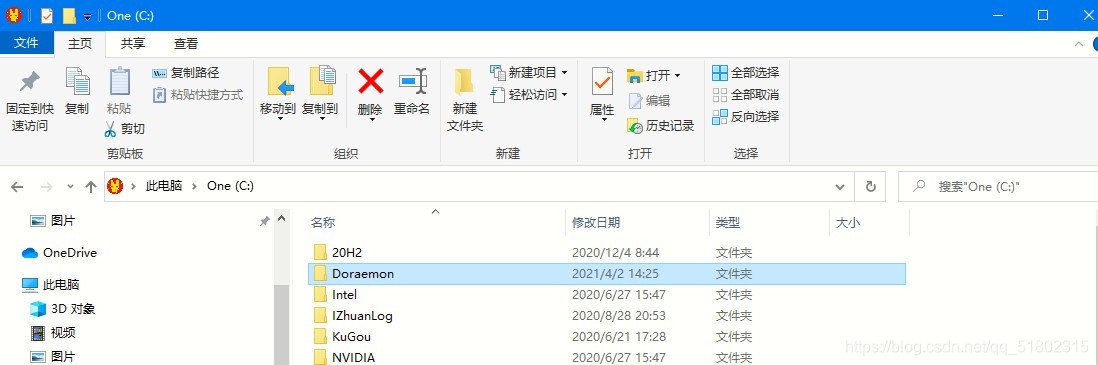
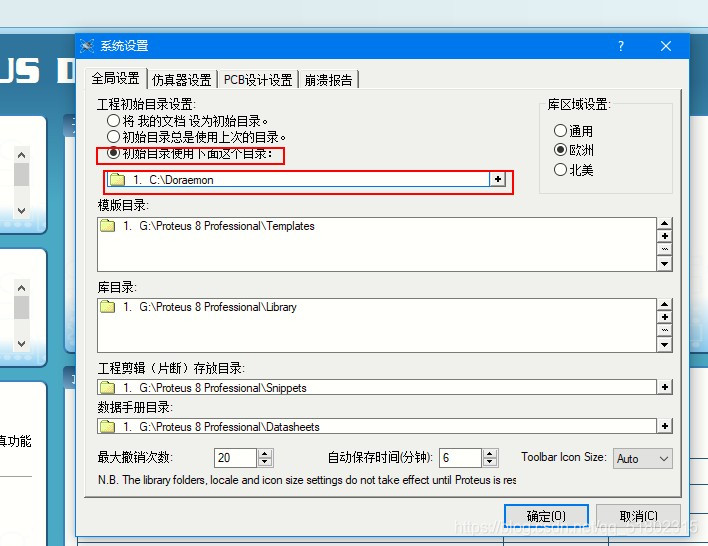
一.在C盘新建一个纯英文路径与名称
c盘的根目录下 新建Doraemon 文件夹
如下图:
然后我们来到第二步
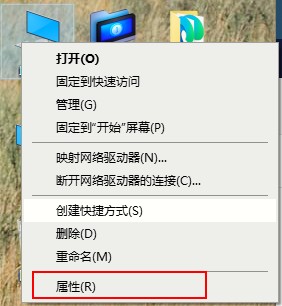
以Windows10为例
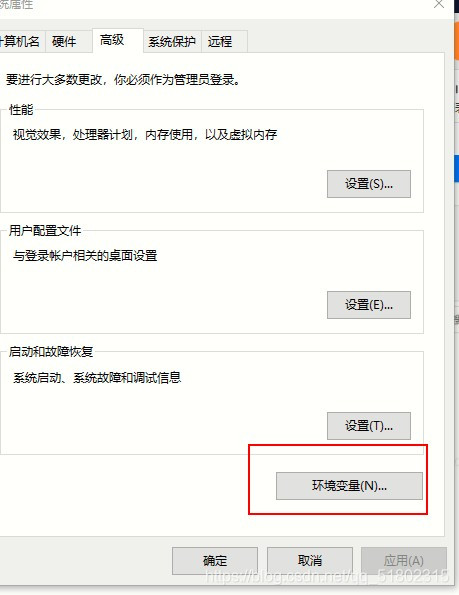
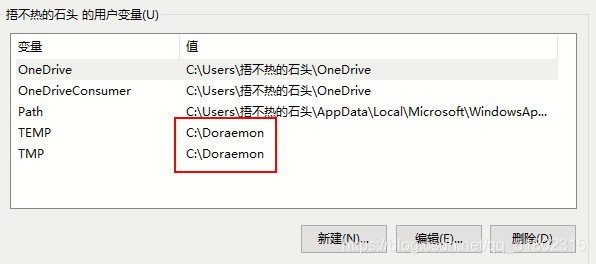
单击此电脑右击——选择属性——高级系统设置——环境变量——更改用户变量这选框内的——编辑变量名为TEMP和TMP的变量值——都改成C:\Doraemon
以后劲量用英文创建文件夹
如图:

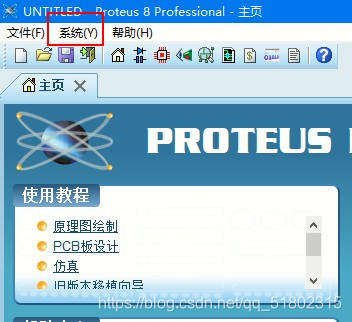
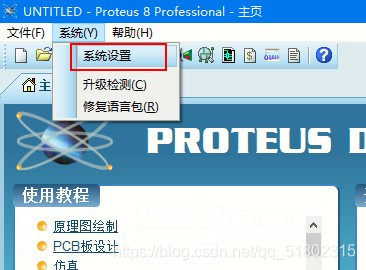
二.为了保险起见把在软件上改仿真结果储存目录
步骤如下
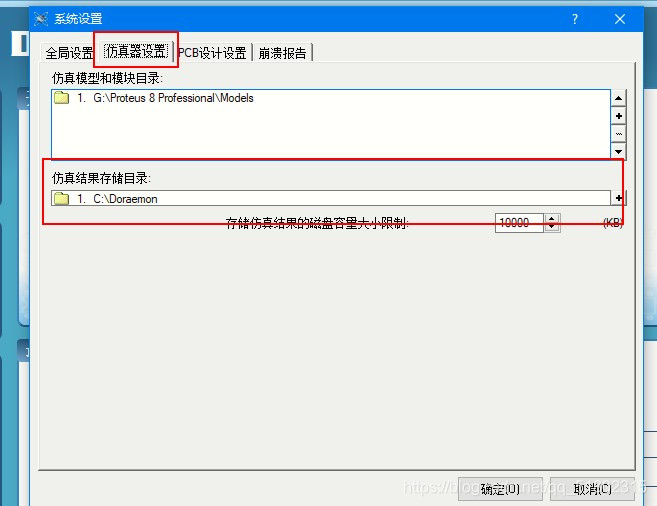
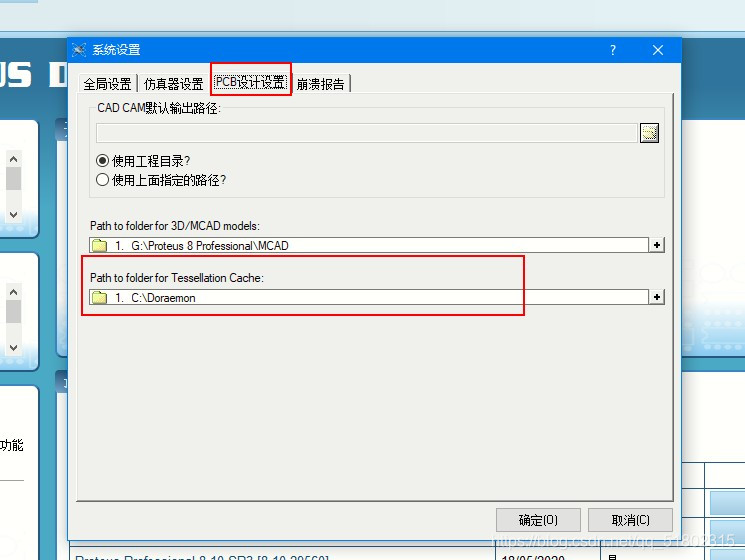
每改一次 点击确定!!!
这样到此解决无法仿真错误了!
小伙伴是不是有一种众里寻他千百度,蓦然回首,那人却在,灯火阑珊处。的意境感!
诗词之美,不止在于语言,更在于那跃然于字里行间的那人生最细腻的情感,或喃喃自语,或娓娓道来。
本文参考于:链接:https://blog.csdn.net/Milky_Way_/article/details/114779453
学会的小伙伴们 记得三连!
后续会给大家带来其他问题的解决方法
感谢平台 带给我的快乐!
赠人玫瑰,手有余香!
如有纰漏私信删除本文
————————————————
版权声明:本文为CSDN博主「Milky_Way_」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Milky_Way_/article/details/114779453

















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









