






手势识别模块
前言
在用arduino驱动这些模块得时候,方法很简单,先去管理库中找这个库,如果有这个库,然后下载这个库,运行历程就行。
一、安装PAJ7620库
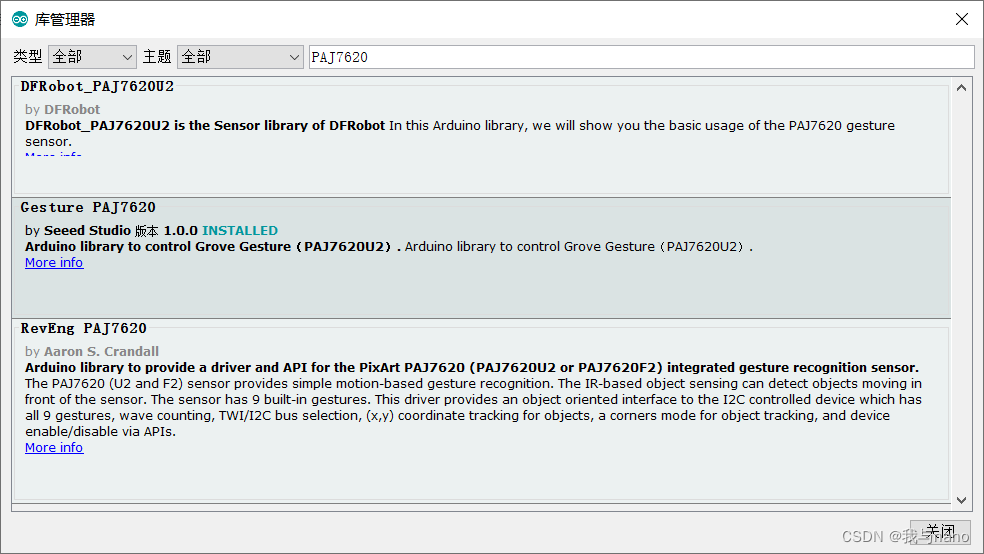
下载第二个库,然后找到
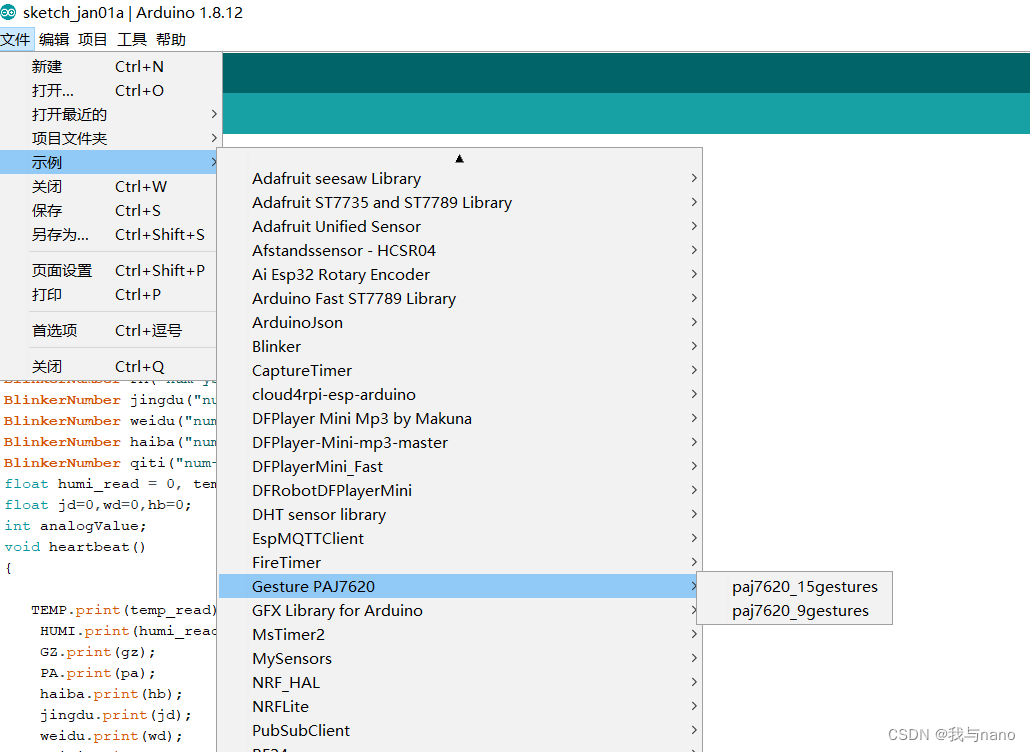
下面有你需要的历程
然后对应接线就可以了,SCL,SDA在uno上有专门的引脚,或者接到A4 A5上都可以。
二、代码
#include <Wire.h>
#include "paj7620.h"
/*
Notice: When you want to recognize the Forward/Backward gestures, your gestures' reaction time must less than GES_ENTRY_TIME(0.8s).
You also can adjust the reaction time according to the actual circumstance.
*/
#define GES_REACTION_TIME 500 // You can adjust the reaction time according to the actual circumstance.
#define GES_ENTRY_TIME 800 // When you want to recognize the Forward/Backward gestures, your gestures' reaction time must less than GES_ENTRY_TIME(0.8s).
#define GES_QUIT_TIME 1000
void setup()
{
uint8_t error = 0;
Serial.begin(9600);
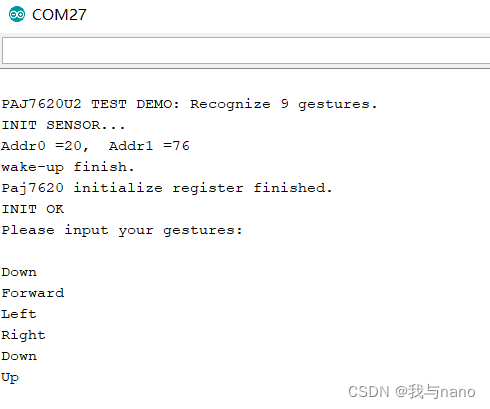
Serial.println("\nPAJ7620U2 TEST DEMO: Recognize 9 gestures.");
error = paj7620Init(); // initialize Paj7620 registers
if (error)
{
Serial.print("INIT ERROR,CODE:");
Serial.println(error);
}
else
{
Serial.println("INIT OK");
}
Serial.println("Please input your gestures:\n");
}
void loop()
{
uint8_t data = 0, data1 = 0, error;
error = paj7620ReadReg(0x43, 1, &data); // Read Bank_0_Reg_0x43/0x44 for gesture result.
if (!error)
{
switch (data) // When different gestures be detected, the variable 'data' will be set to different values by paj7620ReadReg(0x43, 1, &data).
{
case GES_RIGHT_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Right");
}
break;
case GES_LEFT_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Left");
}
break;
case GES_UP_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Up");
}
break;
case GES_DOWN_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Down");
}
break;
case GES_FORWARD_FLAG:
Serial.println("Forward");
delay(GES_QUIT_TIME);
break;
case GES_BACKWARD_FLAG:
Serial.println("Backward");
delay(GES_QUIT_TIME);
break;
case GES_CLOCKWISE_FLAG:
Serial.println("Clockwise");
break;
case GES_COUNT_CLOCKWISE_FLAG:
Serial.println("anti-clockwise");
break;
default:
paj7620ReadReg(0x44, 1, &data1);
if (data1 == GES_WAVE_FLAG)
{
Serial.println("wave");
}
break;
}
}
delay(100);
}


















 549
549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











