






A*算法求解迷宫最短路问题(C++,VScode)
文章目录
开始正文之前,先介绍一篇对我帮助较大一篇博客: A*算法讲解
一、算法思想及实现思路
1.估价函数:
F = G + H,起点为S,终点为E,从S到E经过节点N,S->N所要耗费的代价为已知代价G,N->E所要耗费的实际代价未知,因为当前在节点N,还未走到终点,所以未知路径,代价也未知,但可以设计启发函数来估计N到E要耗费的代价H,从而得出S->N->E所要耗费的代价的估计值F = G + H。
2.open表,closed表:
起初,将起点放到open表中,对open表初始化,因为可以在地图上斜着走,所以对节点扩展时,设当前正在扩展的节点为N,要沿八个方向按顺序依次访问N的相邻八个节点,设相邻八个节点的某个节点为M,访问N周围节点时会遇到以下三种情况:
(1)节点在之前从未被访问过,即节点既不在open表,也不在closed表,此时节点放到open表中,放入之前,应先计算M的F,G,H值,并把当前正在被扩展的节点N作为它的父节点,M的G值是由父节点的G值加上父节点到M的实际距离(二者相邻),再根据估价函数计算H值,再计算F值,根据F值将M放入到open表的正确位置,open表中排在前面的,估计代价F值就越小。
(2)节点在之前被访问过,但未被扩展,即节点在open表,但不在closed表,此时可能要对M的G,F值更新,H值不变,因为它在地图的位置没变,相对终点位置没变,因为M在之前被访问过,所以它已有父节点,但不是当前正在被扩展的节点N,此时,计算N->M要耗费的代价,再加上N的G值,即为S->N->M所要耗费的实际代价,比较新G值与旧G值,若新<旧,则更新M的节点信息,将N作为它的父节点,不在以之前的父节点继续作为当下的父节点,并将旧G值用新G值覆盖,重新计算F值,然后根据F值调整M在open表中的位置(往前调)。
(3)节点在之前已被扩展过,即节点不在open表,在closed表,此时可以直接忽略M,转到N的下一个相邻节点。
当找到终点,且终点被放到closed表中,即可结束搜索,根据子节点存储的父节点信息,往回走,便能得到最短路。
二、问题求解所用到的方法以及数据结构
1.优先队列
根据open表的特性,优先队列正好能和它相匹配,优先队列里的每一个元素都是一个结构体变量,存储自己的行列,以及F,G,H值,当然,需要对运算符重载,保证入队的元素是根据F值进行排序的。
2.二维结构体数组
(1)作用:用来存储每一个节点的信息:父节点的位置,及自身的F,G,H值;记录最短路径,终点扩展后,根据该数组,便可从终点返回至起点。
(2)使用原因:优先队列每次只能修改或读取队首这一个节点,其他节点无法修改,只能出队才能遍历,很不方便,不能反复地、灵活地对队列中的任意一个节点进行修改或读取,也正是如此,如果队列中地节点信息要更新(说明从其它路径到该节点的G值更小),则直接创建一个新的节点,新旧节点均指向地图上的同一位置,即,某一位置的节点信息已经在队列中后,若要对节点信息修改,由于队列只能取队首,不能取到其他节点,所以,最好的做法便是重新为该位置创建新节点,放到队列中,新节点的F值比旧节点的F值更小,故而拍在队列的前面,排在前面的优先扩展,扩展后的节点所对应的位置,该位置的其他在队列中的节点不在扩展,直接跳过,因为那已经没有利用价值了。
3.估价函数的设计
(1)曼哈顿法:
节点到终点的行之差的绝对值+列之差的绝对值:
∣
r
1
−
e
n
d
r
∣
+
∣
c
1
−
e
n
d
c
∣
|r1-end_r| + |c1-end_c|
∣r1−endr∣+∣c1−endc∣

(2)欧氏距离:
两点之间直线距离:
s
q
r
t
(
p
o
w
(
(
r
1
−
e
n
d
r
)
,
2
)
+
p
o
w
(
(
c
1
−
e
n
d
c
)
,
2
)
)
sqrt(pow((r1-end_r),2) + pow((c1-end_c),2))
sqrt(pow((r1−endr),2)+pow((c1−endc),2))

(3)对角化距离:
以节点与终点的为对角线构成的矩形,选取最大正方形(顶点含节点),取其对角线,再从节点相对的点出发,横/竖着走到终点:

三、源码
1.map数组:用于将结果打印,实现可视化(C++可视化粗糙,暂时未去寻找更好的可视化方法)。
2.q数组:二维结构体数组,作用上面已述。
3.heap:优先队列,实现open表,功能已述。
4.index数组:存储8个方向的增量
5.visited数组:标志位数组,=0,为遍历;=1,已遍历,但未扩展;=2,已扩展;
6.FindWay函数:A*算法主要实现函数
创建障碍物这部分比较简陋,不是算法核心,随便设置了一些。
#include <math.h>
#include <stdlib.h>
#include "iostream"
#include <queue>
#include<bits/stdc++.h>
using namespace std;
struct Node{
int row,col;
int f,g,h;
Node(int r,int c,int ff,int gg,int hh):row(r),col(c),f(ff),g(gg),h(hh){}
//push(int r,int c,int ff,int gg,int hh):row(r),col(c),f(ff),g(gg),h(hh){}
};
typedef struct info{
int row,col;
int f,g,h;
}Info;
struct cmp{
bool operator()(Node a,Node b){
return a.f > b.f;
}
};
typedef struct Ind{
int r,c;
}Index;
#define n 90
#define m 100
priority_queue<Node,vector<Node>,cmp> heap;
void create_Maze(char map[][m+2], int visited[][m+2], int start_r, int start_c, int end_r, int end_c)
{
// memset(map, 0, sizeof map);
// memset(visited, 0, sizeof visited);
for(int i=1,j=1;i<=n;i++)
{ j=1;
for(;j<=m;j++)
{
visited[i][j] = 0;
map[i][j] = ':';
}
}
for(int j=0;j<m+2;j++)
{
map[0][j] = '#';
visited[0][j] = 2;
map[n+1][j] = '#';
visited[n+1][j] = 2;
}
for(int i=0;i<n+2;i++)
{
map[i][0] = '#';
visited[i][0] = 2;
map[i][m+1] = '#';
visited[i][m+1] = 2;
}
visited[start_r][start_c] = 1;
map[start_r][start_c] = 'S';
map[end_r][end_c] = 'E';
// visited[4][4] = 2;
// visited[4][5] = 2;
// visited[4][6] = 2;
//打印
// for(int i=0,j=0;i<n+2;i++)
// {
// for(;j<m+2;j++)
// {
// cout<<visited[i][j];
// }
// cout<<endl;
// j=0;
// }
//设置障碍物
for(int j=4; j<15; j++)
{
visited[8][j] = 2;
map[8][j] = '#';
}
for(int i=8; i<15; i++)
{
visited[i][14] = 2;
map[i][14] = '#';
}
for(int i=45;i<60;i++)
{
visited[i][35] = 2;
map[i][35] = '#';
}
for(int j=35;j<70;j++)
{
visited[60][j] = 2;
map[60][j] = '#';
}
for(int i=50;i<70;i++)
{
visited[i][35] = 2;
map[i][35] = '#';
}
for(int j=55;j<77;j++)
{
visited[60][j] = 2;
map[60][j] = '#';
}
for(int i=5;i<8;i++)
{
visited[i][10] = 2;
map[i][10] = '#';
}
for(int j=60; j<m+2;j++)
{
visited[80][j] = 2;
map[80][j] = '#';
}
for(int j=20; j<35; j++)
{
visited[60][j] = 2;
map[60][j] = '#';
}
}
void create_Ind(Index index[])
{
index[0].r = 0;index[0].c = 1;//右
index[1].r = 1;index[1].c = 1;//右下
index[2].r = 1;index[2].c = 0;//下
index[3].r = 1;index[3].c = -1;//左下
index[4].r = 0;index[4].c = -1;//左
index[5].r = -1;index[5].c = -1;//左上
index[6].r = -1;index[6].c = 0;//上
index[7].r = -1;index[7].c = 1;//右上
}
void FindWay(Index index[], Info q[][m+2], int end_r, int end_c, char map[][m+2], int visited[][m+2])
{
while(visited[end_r][end_c] < 2 && !heap.empty())
{
for(int i=0; i<8 && visited[heap.top().row][heap.top().col]<2; i++)
{
//cout<<i<<' '<<heap.top().row<<' '<<heap.top().col<<' '<<heap.top().f<<' '<<heap.top().g<<' '<<heap.top().h<<endl;
//cout<<i;
//if( visited[heap.top().row+index[i].r][heap.top().col+index[i].c] == 2);
if( visited[heap.top().row+index[i].r][heap.top().col+index[i].c] == 1)
{
int f,g,h;
if(index[i].r*index[i].c == 0)
g = heap.top().g + 10;//横着走或竖着走,g值加10
else g = heap.top().g +14;//斜着走,g值加14
if(g < q[heap.top().row+index[i].r][heap.top().col+index[i].c].g)
{//更新已遍历过的子节点信息
h = q[heap.top().row+index[i].r][heap.top().col+index[i].c].h;
f = g + h;
heap.push( Node(heap.top().row+index[i].r, heap.top().col+index[i].c, f, g, h) );
q[heap.top().row+index[i].r][heap.top().col+index[i].c].g = g;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].f = f;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].row = heap.top().row;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].col = heap.top().col;
}
}
if( visited[heap.top().row+index[i].r][heap.top().col+index[i].c] == 0)
{
int f,g,h;
if(index[i].r*index[i].c == 0)
g = heap.top().g + 10;//横着走或竖着走,g值加10
else g = heap.top().g +14;//斜着走,g值加14
//h = abs(end_r - (heap.top().row+index[i].r))*10 + abs(end_c - (heap.top().col+index[i].c))*10; //曼哈顿距离
//h = 10*sqrt((end_r - (heap.top().row+index[i].r))*(end_r - (heap.top().row+index[i].r)) + (end_c - (heap.top().col+index[i].c))*(end_c - (heap.top().col+index[i].c)));//两点间直线距离
h = abs((heap.top().row+index[i].r)-end_r)==abs((heap.top().col+index[i].c)-end_c)?(14*abs((heap.top().col+index[i].c)-end_c)):(abs((heap.top().row+index[i].r)-end_r)>abs((heap.top().col+index[i].c)-end_c)?(4*abs((heap.top().col+index[i].c)-end_c)+10*abs((heap.top().row+index[i].r)-end_r)):(4*abs((heap.top().row+index[i].r)-end_r)+10*abs((heap.top().col+index[i].c)-end_c)));//对角化距离
f = g + h;
heap.push(Node(heap.top().row+index[i].r, heap.top().col+index[i].c, f, g, h));//子节点入队
//q[heap.top().row+index[i].r][heap.top().col+index[i].c].push();
//将子节点的信息保存到二维结构体数组q中
q[heap.top().row+index[i].r][heap.top().col+index[i].c].row = heap.top().row;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].col = heap.top().col;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].f = f;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].g = g;
q[heap.top().row+index[i].r][heap.top().col+index[i].c].h = h;
//if (i==5) cout<<i<<index[i].r<<' '<<index[i].c<<' '<<' '<<heap.top().row+index[i].r<<' '<<heap.top().col+index[i].c<<' '<<q[heap.top().row+index[i].r][heap.top().col+index[i].c].f<<endl;
visited[heap.top().row+index[i].r][heap.top().col+index[i].c] = 1; //表示子节点已遍历,进入队列
map[heap.top().row+index[i].r][heap.top().col+index[i].c] = '=';
}
}
//cout<<heap.top().row<<' '<<heap.top().col<<endl;
visited[heap.top().row][heap.top().col] = 2; //当前节点已扩展,该弹出;
heap.pop();
//cout<<heap.top().row<<' '<<heap.top().col<<endl;
}
}
void printWay(Info q[][m+2], int end_r, int end_c, int start_r, int start_c, char map[][m+2])
{
int r = end_r;
int c = end_c;
int i = r;
int j = c;
//cout<<q[3][4].row<<' '<<q[3][4].col<<endl;
//cout<<q[4][5].row<<' '<<q[4][5].col<<endl;
//cout<<"M\n";
cout<<"最短路(从终点返回起点):";
while(r!=start_r || c!=start_c)
{
cout<<r<<' '<<c<<endl;
i = q[r][c].row;
j = q[r][c].col;
map[q[r][c].row][q[r][c].col] = '*';
r = i;
c = j;
}
map[start_r][start_c] = 'S';
map[end_r][end_c] = 'E';
//cout<<'T';
cout<<r<<' '<<c<<endl;
for(int i=0; i<n+2; i++)
{
for(int j=0; j<=m+2; j++)
{
cout<<map[i][j];
}
cout<<endl;
}
}
int main()
{
//cout<<"输入尺寸";
//cin>>n>>m;
//
int start_r,start_c;//起点
int end_r,end_c;//终点位置
cout<<"输入起点位置:";
cin>>start_r>>start_c;
cout<<"输入终点位置:";
cin>>end_r>>end_c;
// int c1 = abs(start_r - end_r)*10;//曼哈顿法
// int c2 = abs(start_c - end_c)*10;
//int h = 10*sqrt((start_r - end_r)*(start_r - end_r) + (start_c - end_c)*(start_c - end_c));//两点间直线距离
int h = abs(start_r - end_r)==abs(start_c - end_c)?(abs(start_c - end_c)*14):(abs(start_r - end_r)>abs(start_c - end_c)?(4*abs(start_c - end_c)+10*abs(start_r - end_r)):(4*abs(start_r - end_r)+10*abs(start_c - end_c)));//对角化距离
//int h = c1 + c2;
heap.push(Node(start_r,start_c,h,0,h));
Index index[8];
char map[n+2][m+2];
int visited[n+2][m+2];//p_row[n+2][m+2],p_col[n+2][m+2];
Info q[n+2][m+2];
q[start_r][start_c].row = -1;
q[start_r][start_c].col = -1;
q[start_r][start_c].f = h;
q[start_r][start_c].g = 0;
q[start_r][start_c].h = h;
//
create_Maze(map,visited,start_r,start_c,end_r,end_c);
create_Ind(index);
//cout<<heap.top().row<<' '<<heap.top().col<<endl<<'v';
FindWay(index,q,end_r,end_c,map,visited);
//cout<<'z';
printWay(q,end_r,end_c,start_r,start_c,map);
system("pause");
}
四、运行结
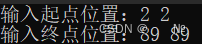
图中S是起点,E是终点。
:是未遍历的点,#是墙,*是路径,=遍历过的点,也是搜索空间。
路径也有打印,只是篇幅太长,没有截图。
五、写在最后:
发表一篇博客,以来记录自己的大二下课设。
整篇代码比较简陋,为了能实现A*算法,没有考虑太多的时空复杂度,用树来实现或许会更好,但限于本人水平有限,用的是数组。















 8066
8066











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











