






最近想在s100机械臂上推理pi0,但是笔记本的显卡显存不足,根据官网的说明,推理pi0至少需要8G的显卡显存,于是我就需要在主机上重新配置系统环境(主机显卡显存是16G)。笔记本上用的是双系统,但是主机打算尝试WSL2的子系统来部署环境,这样对我来说使用起来比较方便,看网上没有专门的教程,只能一点一点查攻略尝试,最终也是成功推理了pi0。
一、配置WSL2
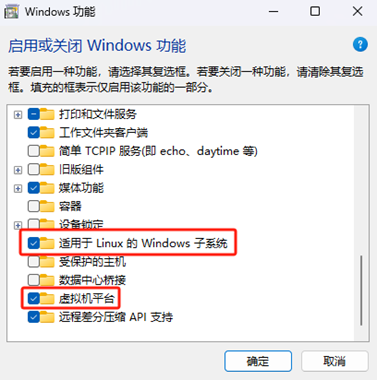
1.打开搜索栏搜索“启用或关闭Windows功能”,勾选图中两个选项;
2.打开PowerShell(以管理员身份)并运行以下命令来更新WSL,将WSL设置为默认版本:
wsl --set-default-version 2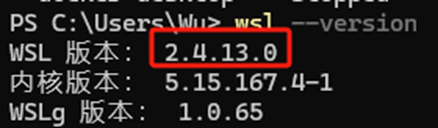
PS:
在配置WSL之前需要查询Windiw系统是否已经开启了虚拟化功能(在任务管理器中可以查看):

若未启用,则需根据电脑型号进入bios设置。
二、安装Ubuntu22.04
方法一:在Microsoft Store里面搜索并安装Ubuntu 22.04 LTS,安装后运行并设置用户名和密码即可。
方法二:打开PowerShell(以管理员身份)并运行以下命令来安装WSL和Ubuntu:
wsl --install -d Ubuntu-22.04过程也是需要填写用户名和密码。(Ubuntu系统为隐示输入密码,不会显示,实则已经输入但是看不见)
三、迁移WSL到其他盘
通过WSL2安装的操作系统默认在C盘,后期内存开销很大,建议迁移到其他盘。
1.在操作之前查看 WSL 的运行状态:
wsl -l -v
2.确保WSL处于停止状态(Stopped),如果是Running,则需要关闭 :
wsl --shutdown3.导出当前的 Linux 系统镜像 :
wsl --export Ubuntu d:\Program\WSL\Ubuntu\Ubuntu.tar
导出之前先确定目标位置是否存在,不存在则自己创建一下。

4.移除之前注册的 WSL:
wsl --unregister Ubuntu若显示以下内容则说明取消注册成功:
适用于 Linux 的 Windows 子系统没有已安装的分发版。
可以通过访问 Microsoft Store 来安装分发版:
https://aka.ms/wslstore
5.重新注册WSL:
# wsl --port Ubuntu <WSL后续要放在哪个文件夹中> <镜像路径>
wsl --import Ubuntu d:\ Program\WSL d:\ Program\WSL\Ubuntu\Ubuntu.tar
6.重新查询WSL状态:

说明已经成功将WSL迁移到目标位置了。
PS:
1.迁移后无需再设置用户名和密码;
2. 迁移之后,d:\ Program\WSL\Ubuntu目录下的Ubuntu.tar可以删除;
3. d:\ Program\WSL这个文件夹就是 WSL2 的系统盘,不要删除!
7.修改默认账号为我们自己的账号。在wsl运行下编辑 wsl.conf文件:
vim /etc/wsl.conf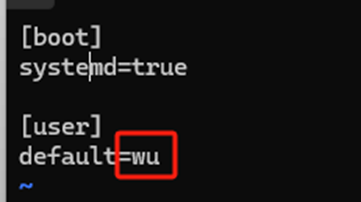
完成上述操作之后,重启一下电脑。
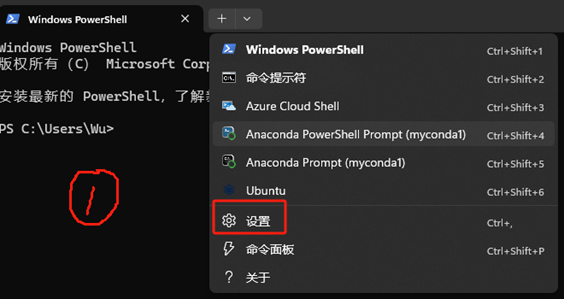
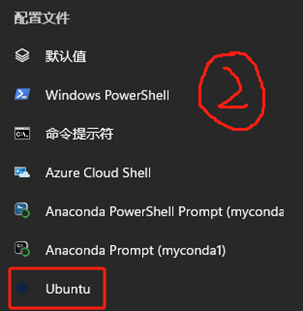
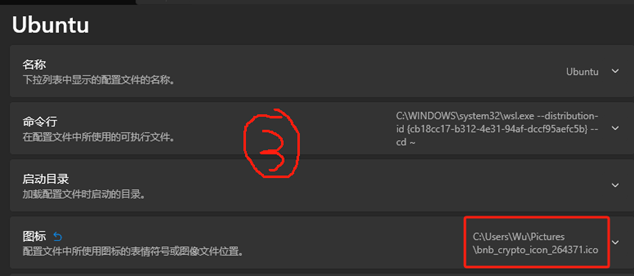
8.在终端管理员中用WSL指令打开Ubuntu系统,可能出现加载用户设置失败的错误:

解决方法也很简单:就是给新配置的Ubuntu终端添加一个可以识别到的ico图标文件。
四、安装Anaconda
1.首先需要更新一下WSL2的软件包:
sudo apt update
sudo apt upgrade2.确保切换到根目录下:
cd3.下载Anaconda的安装包:
wget https://repo.anaconda.com/archive/Anaconda3-2024.02-1-Linux-x86_64.sh
4.安装Anaconda:
bash Anaconda3-2024.02-1-Linux-x86_64.sh 5.设置Anaconda的环境变量:
打开系统文件:
nano ~/.bashrc在文件末尾添加环境变量:
export PATH="/home/用户名/anaconda3/bin:$PATH"添加完成后,按Crrl+O保存,Crrl+X退出。
更新环境变量:
source ~/.bashrc验证是否添加完成:
conda –version如果有信息则安装成功。
五、按需选择是否安装CUDA
由于WSL是Window11下的子系统,显卡驱动问题可以直接在Windows的NVIDIA软件中进行安装,打开PowerShell(以管理员身份)并运行以下命令:
nvidia-smi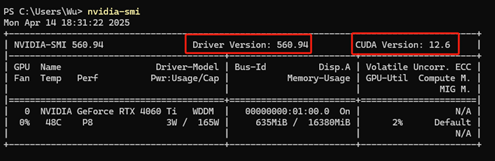
若有信息显示,则无需在Ubuntu安装CUDA,否则可以参考:
win11 WSL ubuntu安装CUDA、CUDNN、TensorRT最有效的方式
六、安装Ubuntu图形化界面
1.安装桌面环境
在Ubuntu终端运行命令检查软件包更新:
sudo apt-get update && sudo apt-get upgrade接着安装桌面依赖:
sudo apt-get install ubuntu-desktop unity compizconfig-settings-manager2. VcXsrv安装与配置
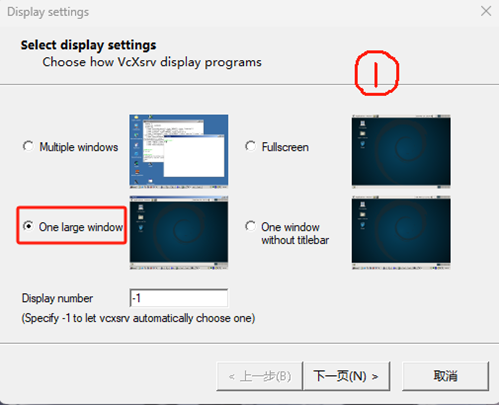
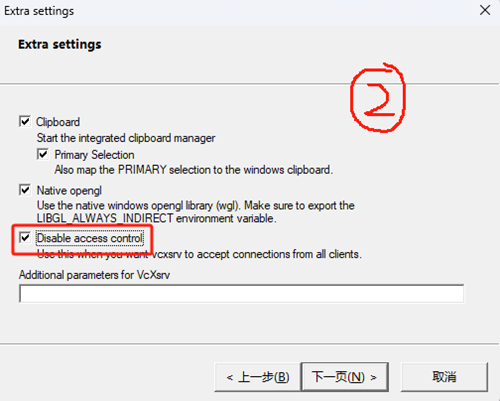
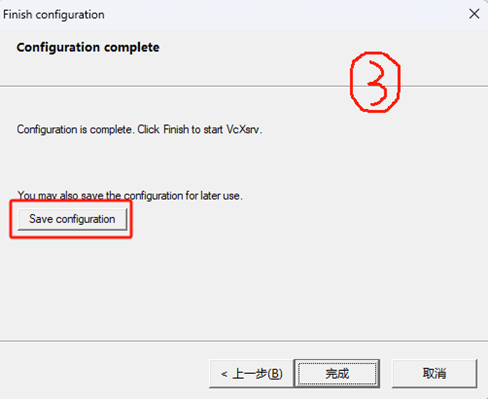
从SourceForge上面下载最新版本的VcXsrv,安装完成后启动开始菜单中的XLaunch,进行显示设置:勾选“One large window”和“Dissable access control”,以及建议保存一下配置,下次直接打开config.xlaunch就行,无需再配置。
配置好打开config.xlaunch,会出现一个黑色界面,先不用管它,最小化即可。
3.配置xfce4
在Ubuntu终端运行命令:
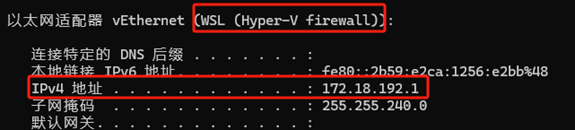
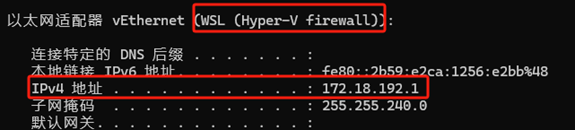
sudo apt install -y xfce4查看windows系统和WSL2通信使用的ip地址:
在Windows下打开powershell运行“ipconfig“指令查看IP地址。
在Ubuntu终端配置一下通信:
sudo nano /etc/resolv.conf输入密码后在文件中取消下面两行的注释禁用自动重新生成配置文件,否则重启后这个地址会变。
[network]
generateResolvConf = false
添加环境变量:
nano ~/.bashrc在文件末尾添加以下两行内容:
#(172.18.192.1是上面步骤查询到的ip地址,注释不要复制进去)
export DISPLAY=172.18.192.1:0
export WAYLAND_DISPLAY=$DISPLAY
更新配置:
source ~/.bashrc启动xfce4:
startxfce4
点开之前最小化的XLaunch就会发现已经有界面了:
七、安装USBIPD-WIN
WSL 2 本身并不支持连接USB 设备,因此需要安装一下 usbipd-win 这个项目来帮助在 wsl2 中共享到宿主机的 usb 设备。
PS: 这个过程一定要先关掉防火墙,关掉防火墙,关掉防火墙。
1.在Ubuntu终端使用如下指令安装usbipd-win
sudo apt install linux-tools-generic hwdata
sudo update-alternatives --install /usr/local/bin/usbip usbip /usr/lib/linux-tools/*-generic/usbip 20
2.WSL2连接宿主机USB设备
在windows下按“win+X”打开终端管理员,运行以下指令查看设备连接情况(需要开着Ubuntu):
usbipd list
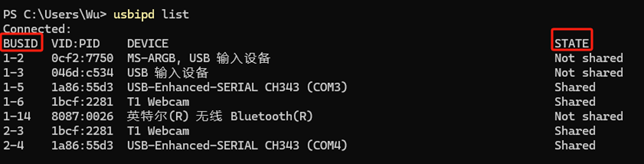
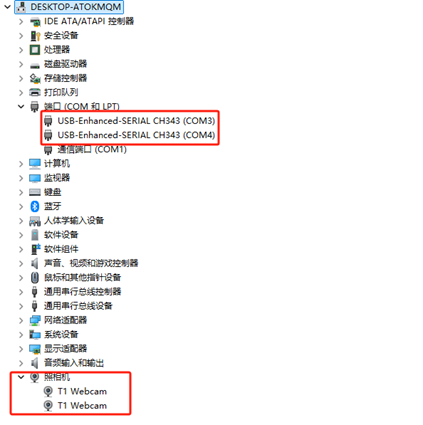
需要关注的是BUSID和STATE,分别表示连接设备的唯一id和连接状态,由于有些设备已经共享到WSL2下,所以显示的是“Shared”,未附加的USB设备会显示“Not shared”,此时可以在windows的设备管理器查看到这些连接的USB设备。
使用以下命令将USB设备(注意使用BUSID)共享到WSL2:
usbipd bind --busid 1-14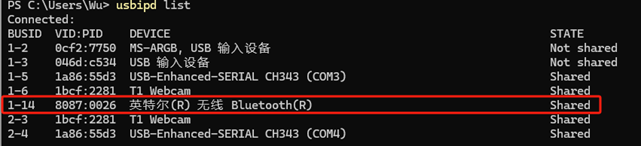
使用以下命令将已经共享的USB设备附加到WSL2:
usbipd attach -w -b 2-4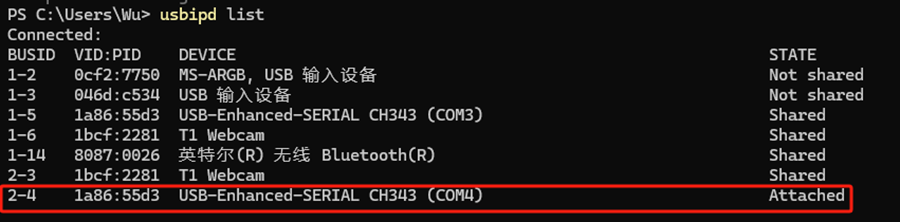
3.在Ubuntu上查看是否已经连接到USB设备:
lsusb
另外在windows的设备管理器已经检测不到附加到WSL2的USB设备,说明已经成功了。因为windows和WSL2不能共用USB设备,想要恢复最简单的方法就是物理断开连接,不过Ubuntu想要再使用就只需要重新附加连接,前提是WSL2要处在活跃状态。

八、重构Ubuntu内核
按照上面的步骤,已经可以将端口COM附加到WSL2下的Ubuntu系统,在其终端中,只需要给对应端口开放权限,便可以使用改端口控制主从机械臂(PS:需要先安装并且标定好机械臂,若未安装好,可以先跳过下面的验证环节。)(要确定好系统连接的主从机械臂端口是哪两个,在我这里/dev/ttyACM0是主臂,/dev/ttyACM1是从动臂,每次连接都可能发生变化,注意使用前先确定好对应的端口。)
开放权限:
sudo chmod 777 /dev/ttyACM0
sudo chmod 777 /dev/ttyACM1
可以通过大佬分享的网站在线控制机械臂,看看对应的端口。https://so-arm100.bambot.org/![]() https://so-arm100.bambot.org/
https://so-arm100.bambot.org/
但是,仅仅只是这样的方法开放权限给USB相机,还是无法在Ubuntu下打开,原因是WSL2作为windows的子系统,其中是不包含相机的驱动,想要相机能够运行起来,需要手动给Ubuntu重构内核。重构内核的方法,可以参考以下三个博主的文章:
【WSL 2】在 Windows10 上配置 WSL 2 连接 USB 设备 D435i
WSL 使用内部 USB Camera 及 V4L2的简单接触
我参考了前两篇文章,重构了Ubuntu的内核,但是在验证是否能调用摄像头的时候发生了问题:在Ubuntu中,我是能够检测到windows附加在WSL2中的摄像机信息,但是无法检测到任何的/dev/video端口,可以使用如下命令查看系统中所有的video设备。
ls /dev/video*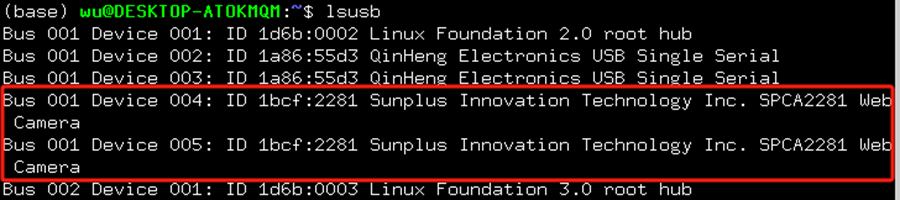
没有的话,建议在重构内核部分再仔细配置一下,确保教程中的配置没有遗漏,配置完后,最好是重启计算机而不是重启WSL,确保系统配置能够重新加载。
重启之后需要重新附加这些设备到USB中,并且在Ubuntu终端运行以下指令查看端口
ls /dev/video*
给摄像头配置权限:
sudo chmod 777 /dev/video*接下来用test.py和test_2cam.py文件找到对应摄像头的index以及测试两个摄像头是否可以同时运行。
很奇怪的是,上面的代码成功运行了摄像头,但是我从教程中安装cheese以及系统自带的Camera并不能打开摄像头,原因未知,但是可以使用guvcview打开。
另外可以使用v4l2进行抓图测试:
1.首先安装val2:
sudo apt install v4l-utils2.使用以下命令可以查询系统中连接的设备:
v4l2-ctl --list-devices 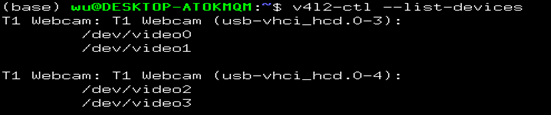
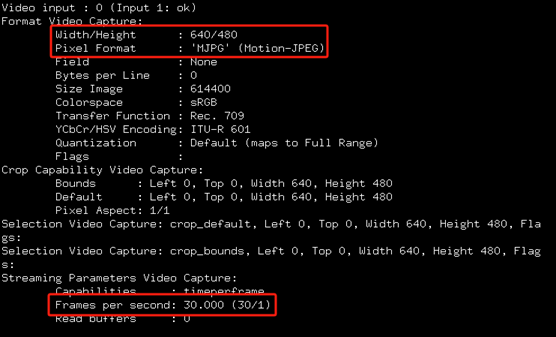
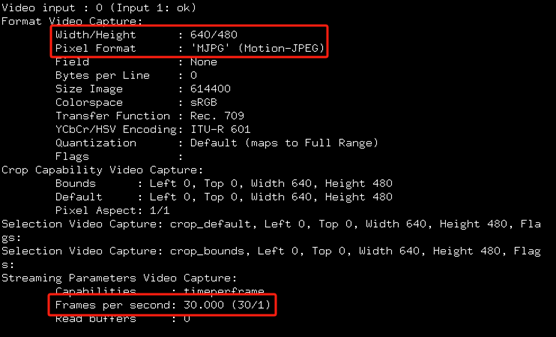
3.使用以下命令查询媒体设备的相关信息:
v4l2-ctl -d /dev/video0 –all需要查看摄像头的像素格式、分辨率和图像大小,后面运行lerobot代码有个坑在这里面。
4.抓取图片:
v4l2-ctl --device=/dev/video0 --set-fmt-video=width=640,height=480,pixelformat=MJPG --stream-mmap --stream-to=frame.jpg --stream-skip=20 --stream-count=1九、安装Clash for windows
由于lerobot代码运行需要登录huggingface,所以需要梯子翻墙,否则很容易因为网络问题导致程序运行中断。
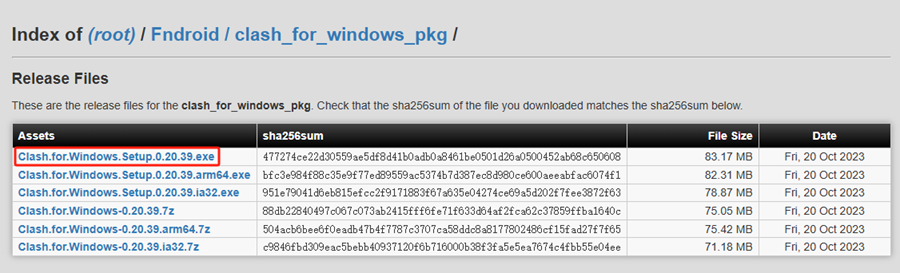
1.Clash for windows下载地址:Clash for Windows 下载 | Clash官网
2.软件配置
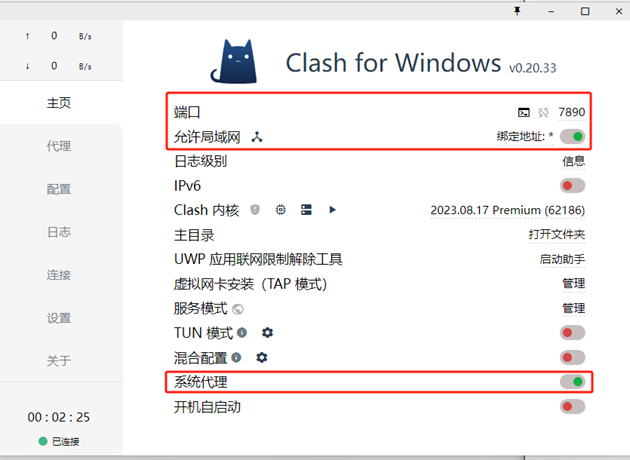
当然这只是软件配置,真正能够翻墙还是要氪金,可以参考:Clash for Windows 官网下载、设置教程。
3.配置代理
我们仍然需要用到上面步骤查到的以太网的ip地址:
进入WSL终端,使用以下命令添加环境变量:
nano ~/.bashrc在文件中添加两行代码:
alias proxy='export all_proxy=http://[ip地址]:7890' #上面软件配置时端口是7890
alias unproxy='unset all_proxy'
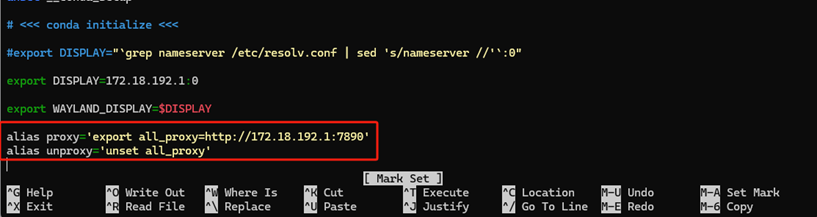
添加完成后“Ctrl+O”保存,“Ctrl+X”退出。
更新配置:
source ~/.bashrc激活环境输入以下命令(clash for windows保持活跃):
proxy # 激活代理
unproxy # 取消代理

可以用谷歌进行测试:
curl www.google.com如果出现网页源代码,则说明成功。
十、配置Lerobot的代码环境
可以参考:
(七)lerobot开源项目so100新版本全流程操作(操作记录)
+++++++++++++++++++++++++++++++分割线+++++++++++++++++++++++++++++++++++++
以下是记录我在完成整个流程所遇到的部分问题以及解决方案:
++++++++1++++++++++
conda install -y -c conda-forge ffmpeg
pip uninstall -y opencv-python
conda install -y -c conda-forge "opencv>=4.10.0"
我这安装这两个会报错,这边记录一下解决方法:
1.安装ffmpeg会一直卡在solving environment,刚开始以为用的国外源速度太慢了,先后尝试了清华,中科大和阿里云的镜像源,还是没有解决问题,后面用conda config --remove-key channels,擦除镜像源通道,用默认的解决了;
2.安装opencv会报错:Error while loading conda entry point: conda-libmamba-solver (libarchive.so.19: cannot open shared object file: No such file or directory),可以参考这篇文章:联手ChatGPT解决使用conda命令出现的conda-libmamba-solver和load_entrypoints报错问题。
++++++++2++++++++++
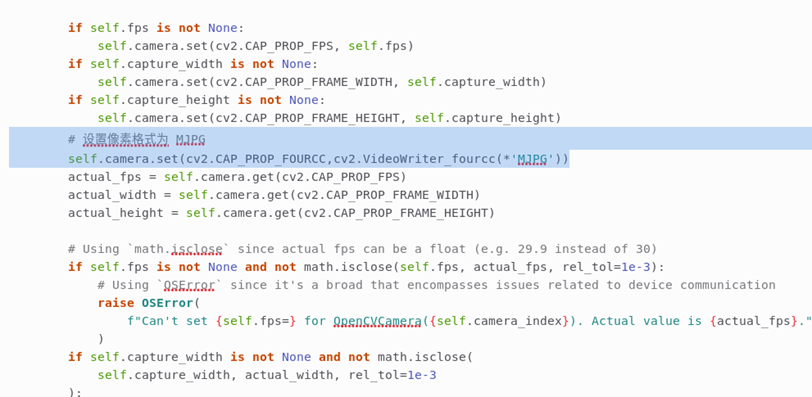
上面步骤我们获得了摄像头的一些参数:图像大小,像素格式和分辨率,在lerobot代码中需要稍微修改下才能运行,在lerobot/common/robot_devices/cameras/opencv.py代码中添加:
# 设置像素格式为 MJPG
self.camera.set(cv2.CAP_PROP_FOURCC,cv2.VideoWriter_fourcc(*'MJPG'))
++++++++3++++++++++
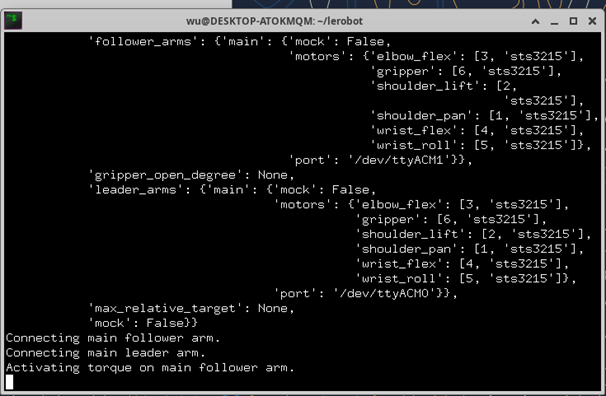
在运行推理代码时,会卡在"Activating torque on main follower arm."排查了原因,发现是conda和pip安装的依赖冲突了,解决方法是:重开一个conda环境+jpeg libtiff,以及专门通过 conda 安装 opencv,numpy。(也有可能是当时在问题1那边安装出问题有关,建议重新来就好了。)
++++++++4++++++++++
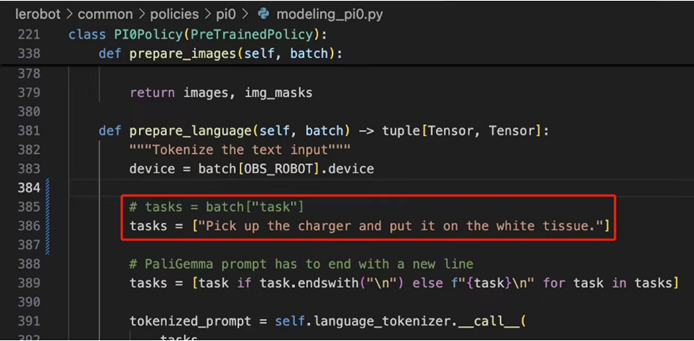
pi0推理时候报错batch[‘task’],解决方法:将图片中文件代码原tasks注释掉,自己设置一个tasks。
++++++++5++++++++++
Pi0推理的过程中,代码运行过程中会被killed掉,可以使用以下命令查看:
sudo dmesg | tail -7会发现出问题的根本原因是WSL2的内存不足,而WSL2内存由两块组成:物理内存和虚拟内存,WSL2物理内存最大可分配一般是windows系统实际物理内存的80%(过多容易导致windows系统卡顿、崩溃)。
内存可以通过“win+R”,输入cmd回车,使用以下命令查看:
Systeminfo
配置WSL2内存:
找到步骤八中保存的.wslconfig文件,用记事本打开,添加以下代码(根据自己实际修改):
memory=10GB # 分配给 WSL 2 的最大内存量
swap=15GB # 分配给 WSL 2 的交换空间大小
processors=4 # 分配给 WSL 2 的 CPU 核心数
localhostForwarding=true # 允许从 Windows 访问 WSL 2 的 localhost 端口
保存后重启计算机,确保配置能够更新。重启后可以在WSL终端输入以下指令查看:
free -h 
或者在Ubuntu系统的“System Monitor”中查看:
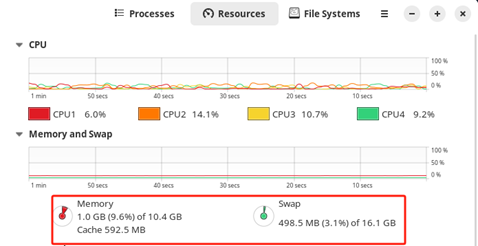
实际在推理pi0过程中,可以用这种方法查看内存使用情况,在我电脑上推理,所需要的内存大约是17GB。
++++++++6++++++++++
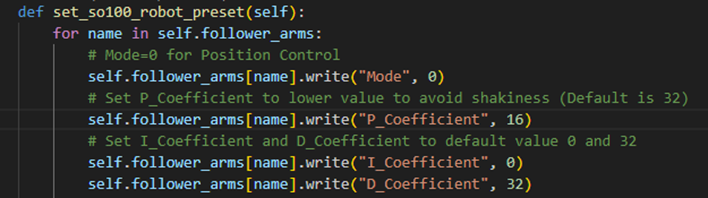
推理pi0时,从动臂抖动很明显,可以通过调节PID解决这个问题。
lerobot-main/lerobot/common/robot_devices/robots/manipulator.py下,找到set_so100_robot_preset方法,调节PID三个值可以使机械臂达到比较理想的状态。
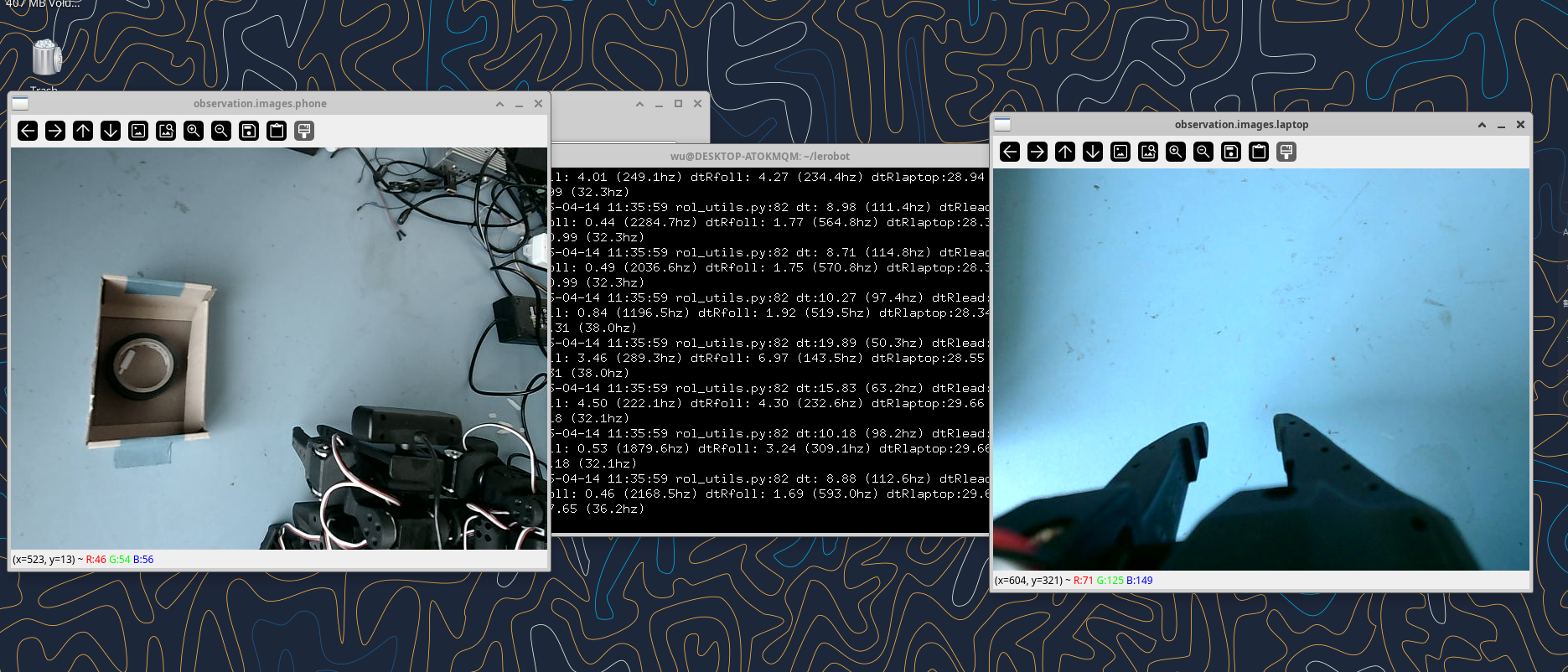
附最后成功的图片:
参考文章
WSL2的安装与配置(创建Anaconda虚拟环境、更新软件包、安装PyTorch、VSCode)
Program Hangs at "Activating torque on main follower arm." During Teleoperation SO 100

















 5686
5686

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









