






这届题中我觉得重要的就是eeprom的写入的时候是大于两个字节的,所以要分成两个来写,还有一个就是对于S11和S10的使用要特别注意约束条件。
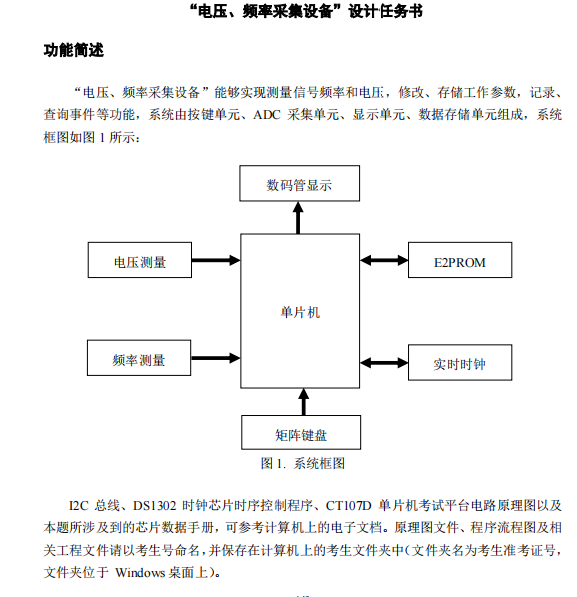
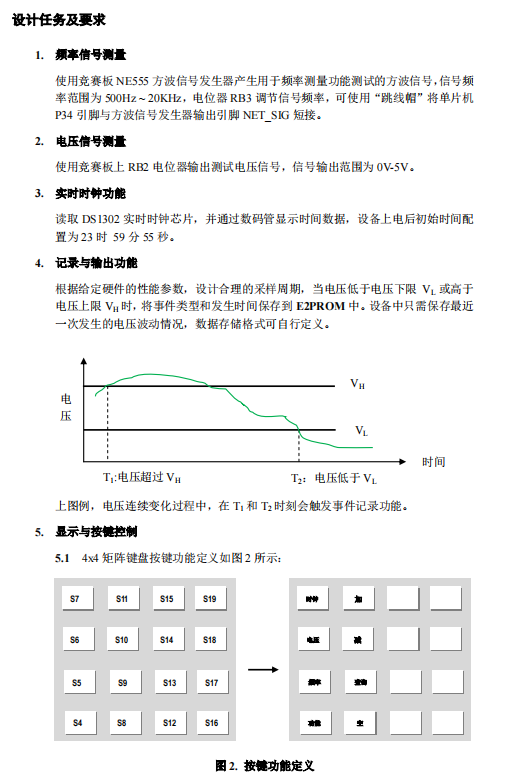
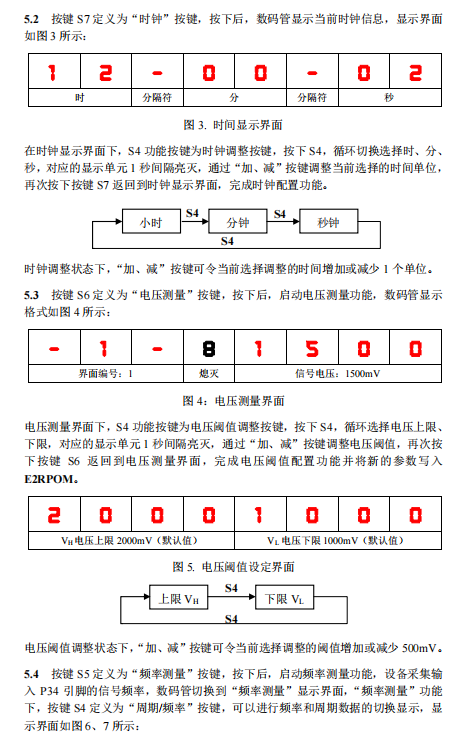
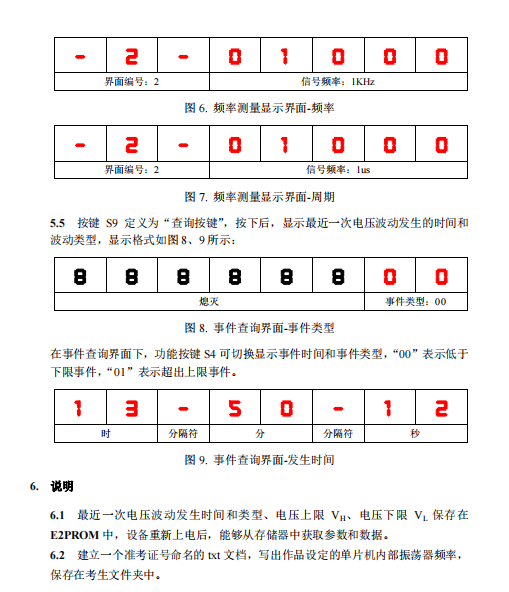
题目:
代码:
main.c
#include "reg52.h"
#include"intrins.h"
#include"ds1302.h"
#include"iic.h"
sfr AUXR=0x8e;
sfr P4=0xC0;
int code write_add[]={0x80,0x82,0x84};
int code read_add[]={0x81,0x83,0x85};
int time[]={0x55,0x59,0x23};
int judge_time[]={0x00,0x00,0x00};
int code xianshi[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf};
int temp_h,temp_m,temp_s;
int time_mode=0;
int v_mode=0;
int f_mode=0;
int count_f;int num_f;
int num_t;//周期
int num_v;
int smg_mode=0;
int shanshuo=0;//闪烁
int v_h=2000;
int v_l=1000;
int judge_mode;
int judge_temp=0;
sbit R1=P3^0;
sbit R2=P3^1;
sbit R3=P3^2;
sbit R4=P3^3;
sbit C4=P3^4;
sbit C3=P3^5;
sbit C2=P4^2;
sbit C1=P4^4;
void choose_573(int i)
{
switch(i)
{
case(0):P2=(P2&0x1f)|0x00;break;
case(4):P2=(P2&0x1f)|0x80;break;
case(5):P2=(P2&0x1f)|0xa0;break;
case(6):P2=(P2&0x1f)|0xc0;break;
case(7):P2=(P2&0x1f)|0xe0;break;
}
}
void init_system()
{
choose_573(4);
P0=0xff;
choose_573(5);
P0=0x00;
choose_573(0);
}
//====================================时间
void write_time()
{
int i;
Write_Ds1302_Byte(0x8e,0x00);
for(i=0;i<3;i++)
{
Write_Ds1302_Byte(write_add[i],time[i]);
}
Write_Ds1302_Byte(0x8e,0x80);
}
void read_time()
{
int i;
for(i=0;i<3;i++)
{
time[i]=Read_Ds1302_Byte(read_add[i]);
}
}
//====================================
//====================================555 and v
void Timer0Init(void) //100微秒@11.0592MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD = 0x04; //设置定时器模式
TL0 = 0xff; //设置定时初始值
TH0 = 0xff; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0=1;
EA=1;
}
void time0_service() interrupt 1
{
count_f++;
}
void V()
{
num_v=get_v();
}
//====================================
//====================================中断
void Timer1Init(void) //5毫秒@11.0592MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x00; //设置定时初始值
TH1 = 0x28; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1=1;
EA=1;
}
int count_1;int count_2;
void time1_server() interrupt 3
{
count_1++;
count_2++;
if(count_1>=100)
{
count_1=0;
num_f=count_f;
count_f=0;
// V();
num_t=1000000/num_f;
}
if(count_2>=200)
{
count_2=0;
if(shanshuo==0)
{
shanshuo=1;
}
else
{
shanshuo=0;
}
}
}
//====================================
//====================================键盘
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 108;
j = 145;
do
{
while (--j);
} while (--i);
}
void key_board()
{
R1=0;R2=R3=R4=1;
C1=C2=C3=C4=1;
//S7
if(C1==0)
{
Delay10ms();
if(C1==0)
{
smg_mode=0;
time_mode=0;
}
while(!C1);
}
//S11 加
if(C2==0)
{
Delay10ms();
if(C2==0)
{
if(smg_mode==0)//time
{
if(time_mode==1)
{
temp_h=(time[2]/16)*10+time[2]%16;
temp_h++;
if(temp_h>=24)
{
temp_h=0;
}
time[2]=((temp_h/10)*6)+temp_h;
write_time();
}
if(time_mode==2)
{
temp_m=(time[1]/16)*10+time[1]%16;
temp_m++;
if(temp_m>=60)
{
temp_m=0;
}
time[1]=((temp_m/10)*6)+temp_m;
write_time();
}
if(time_mode==3)
{
temp_s=(time[0]/16)*10+time[0]%16;
temp_s++;
if(temp_s>=60)
{
temp_s=0;
}
time[0]=((temp_s/10)*6)+temp_s;
write_time();
}
}
if(smg_mode==1)
{
if(v_mode==1)
{
v_h=v_h+500;
if(v_h>9500)
{
v_h=9500;
}
}
if(v_mode==2)
{
v_l=v_l+500;
if(v_l>v_h)
{
v_l=v_l-500;
}
}
}
}
while(!C2);
}
R2=0;R1=R3=R4=1;
C1=C2=C3=C4=1;
//S6
if(C1==0)
{
Delay10ms();
if(C1==0)
{
smg_mode=1;
v_mode=0;
}
while(!C1);
}
//S10减
if(C2==0)
{
Delay10ms();
if(C2==0)
{
if(smg_mode==0)//time
{
if(time_mode==1)
{
temp_h=(time[2]/16)*10+time[2]%16;
temp_h--;
if(temp_h<0)
{
temp_h=23;
}
time[2]=((temp_h/10)*6)+temp_h;
write_time();
}
if(time_mode==2)
{
temp_m=(time[1]/16)*10+time[1]%16;
temp_m--;
if(temp_m<0)
{
temp_m=59;
}
time[1]=((temp_m/10)*6)+temp_m;
write_time();
}
if(time_mode==3)
{
temp_s=(time[0]/16)*10+time[0]%16;
temp_s--;
if(temp_s<0)
{
temp_s=59;
}
time[0]=((temp_s/10)*6)+temp_s;
write_time();
}
}
if(smg_mode==1)
{
if(v_mode==1)
{
v_h=v_h-500;
if(v_h<v_l)
{
v_h=v_h+500;
}
}
if(v_mode==2)
{
v_l=v_l-500;
if(v_l<0)
{
v_l=0;
}
}
}
}
while(!C2);
}
R3=0;R1=R2=R4=1;
C1=C2=C3=C4=1;
//S5
if(C1==0)
{
Delay10ms();
if(C1==0)
{
smg_mode=2;
f_mode=0;
}
while(!C1);
}
//S9 查询
if(C2==0)
{
Delay10ms();
if(C2==0)
{
smg_mode=3;
judge_temp=0;
}
while(!C2);
}
R4=0;R1=R2=R3=1;
C1=C2=C3=C4=1;
//S4
if(C1==0)
{
Delay10ms();
if(C1==0)
{
if(smg_mode==0)
{
time_mode++;
if(time_mode>=4)
{
time_mode=0;
}
}
if(smg_mode==1)
{
v_mode++;
if(v_mode>=3)
{
v_mode=0;
write_EEPROM(0x01,v_h);
Delay10ms();
write_EEPROM(0x02,v_h>>8);
Delay10ms();
write_EEPROM(0x03,v_l);
Delay10ms();
write_EEPROM(0x04,v_l>>8);
}
}
if(smg_mode==2)
{
f_mode++;
if(f_mode>=2)
{
f_mode=0;
}
}
if(smg_mode==3)
{
judge_temp++;
if(judge_temp>=2)
{
judge_temp=0;
}
}
}
while(!C1);
}
}
//====================================
//====================================数码管
void Delay400us() //@11.0592MHz
{
unsigned char i, j;
i = 5;
j = 74;
do
{
while (--j);
} while (--i);
}
void SMG(int wei,int dat)
{
choose_573(6);
P0=0x80>>(wei-1);
choose_573(7);
P0=xianshi[dat];
choose_573(0);
Delay400us();
choose_573(7);
P0=xianshi[10];
choose_573(0);
}
void smg_display()
{
if(smg_mode==0)//时间显示
{
if(time_mode==3&&shanshuo==1)
{
SMG(1,10);
SMG(2,10);
}
else
{
SMG(1,time[0]%16);
SMG(2,time[0]/16);
}
SMG(3,11);
if(time_mode==2&&shanshuo==1)
{
SMG(4,10);
SMG(5,10);
}
else
{
SMG(4,time[1]%16);
SMG(5,time[1]/16);
}
SMG(6,11);
if(time_mode==1&&shanshuo==1)
{
SMG(7,10);
SMG(8,10);
}
else
{
SMG(7,time[2]%16);
SMG(8,time[2]/16);
}
}
if(smg_mode==1)
{
if(v_mode==0)
{
SMG(1,num_v%10);
SMG(2,(num_v%100)/10);
SMG(3,(num_v%1000)/100);
SMG(4,(num_v%10000)/1000);
SMG(5,10);
SMG(6,11);
SMG(7,smg_mode);
SMG(8,11);
}
if(v_mode==1&&shanshuo==1)
{
SMG(1,v_l%10);
SMG(2,(v_l%100)/10);
SMG(3,(v_l%1000)/100);
SMG(4,(v_l%10000)/1000);
SMG(5,10);
SMG(6,10);
SMG(7,10);
SMG(8,10);
}
else if(v_mode==2&&shanshuo==1)
{
SMG(1,10);
SMG(2,10);
SMG(3,10);
SMG(4,10);
SMG(5,v_h%10);
SMG(6,(v_h%100)/10);
SMG(7,(v_h%1000)/100);
SMG(8,(v_h%10000)/1000);
}
else if((v_mode==1||v_mode==2)&&shanshuo==0)
{
SMG(1,v_l%10);
SMG(2,(v_l%100)/10);
SMG(3,(v_l%1000)/100);
SMG(4,(v_l%10000)/1000);
SMG(5,v_h%10);
SMG(6,(v_h%100)/10);
SMG(7,(v_h%1000)/100);
SMG(8,(v_h%10000)/1000);
}
}
if(smg_mode==2)
{
if(f_mode==0)
{
SMG(1,num_f%10);
SMG(2,(num_f%100)/10);
SMG(3,(num_f%1000)/100);
SMG(4,(num_f%10000)/1000);
SMG(5,(num_f%100000)/10000);
SMG(6,11);
SMG(7,smg_mode);
SMG(8,11);
}
if(f_mode==1)
{
SMG(1,num_t%10);
SMG(2,(num_t%100)/10);
SMG(3,(num_t%1000)/100);
SMG(4,(num_t%10000)/1000);
SMG(5,(num_t%100000)/10000);
SMG(6,11);
SMG(7,smg_mode);
SMG(8,11);
}
}
if(smg_mode==3)
{
if(judge_temp==0)
{
SMG(1,judge_mode);
SMG(2,0);
SMG(3,10);
SMG(4,10);
SMG(5,10);
SMG(6,10);
SMG(7,10);
SMG(8,10);
}
if(judge_temp==1)
{
SMG(1,judge_time[0]%16);
SMG(2,judge_time[0]/16);
SMG(3,11);
SMG(4,judge_time[1]%16);
SMG(5,judge_time[1]/16);
SMG(6,11);
SMG(7,judge_time[2]%16);
SMG(8,judge_time[2]/16);
}
}
}
//====================================
//====================================判断
void judge_work()
{
//大于
if(num_v==v_h)
{
// Delay10ms();
// if(num_v<v_h)
{
int i;
judge_mode=1;
for(i=0;i<3;i++)
{
judge_time[i]=time[i];
}
}
}
//小于
if(num_v==v_l&&num_v<v_h)
{
Delay10ms();
if(num_v>=v_l)
{
int i;
judge_mode=0;
for(i=0;i<3;i++)
{
judge_time[i]=time[i];
}
}
}
}
//====================================
//====================================eeprom_read
void eeprom_read()
{
v_h=read_EEPROM(0x02);
v_h=(v_h<<8)|read_EEPROM(0x01);
v_l=read_EEPROM(0x04);
v_l=(v_l<<8)|read_EEPROM(0x03);
}
//====================================
void main()
{
init_system();
write_time();
Timer0Init();
Timer1Init();
eeprom_read();
while(1)
{
read_time();
key_board();
smg_display();
V();
judge_work();
}
}
iic.c
/*
程序说明: IIC总线驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台 8051,12MHz
日 期: 2011-8-9
*/
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
//总线引脚定义
sbit SDA = P2^1; /* 数据线 */
sbit SCL = P2^0; /* 时钟线 */
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//总线启动条件
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//总线停止条件
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//发送应答
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0:应答,1:非应答
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//等待应答
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//通过I2C总线发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//从I2C总线上接收数据
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
int get_v()
{
int temp;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x03);
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
temp=temp*1.96+0.5;
temp=temp*10;
return temp;
}
void write_EEPROM(int add,int dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
int read_EEPROM(int add)
{
int temp;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp;
}
iic.h
#ifndef _IIC_H
#define _IIC_H
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
int get_v();
void write_EEPROM(int add,int dat);
int read_EEPROM(int add);
#endif
ds1302.c
/*
程序说明: DS1302驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台 8051,12MHz
日 期: 2011-8-9
*/
#include <reg52.h>
#include <intrins.h>
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3; // DS1302复位
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
void Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte( unsigned char address );
#endif














 344
344











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









