







stm32 freeRTOS 互斥量实验 (HAL版)
本实验是通过创建一个互斥量和三个优先级不同的任务来通过不同任务对互斥量的信号量的获取和释放来实现的,实现现象是通过LED灯的闪烁和串口的输出来显示的。
HAL配置:
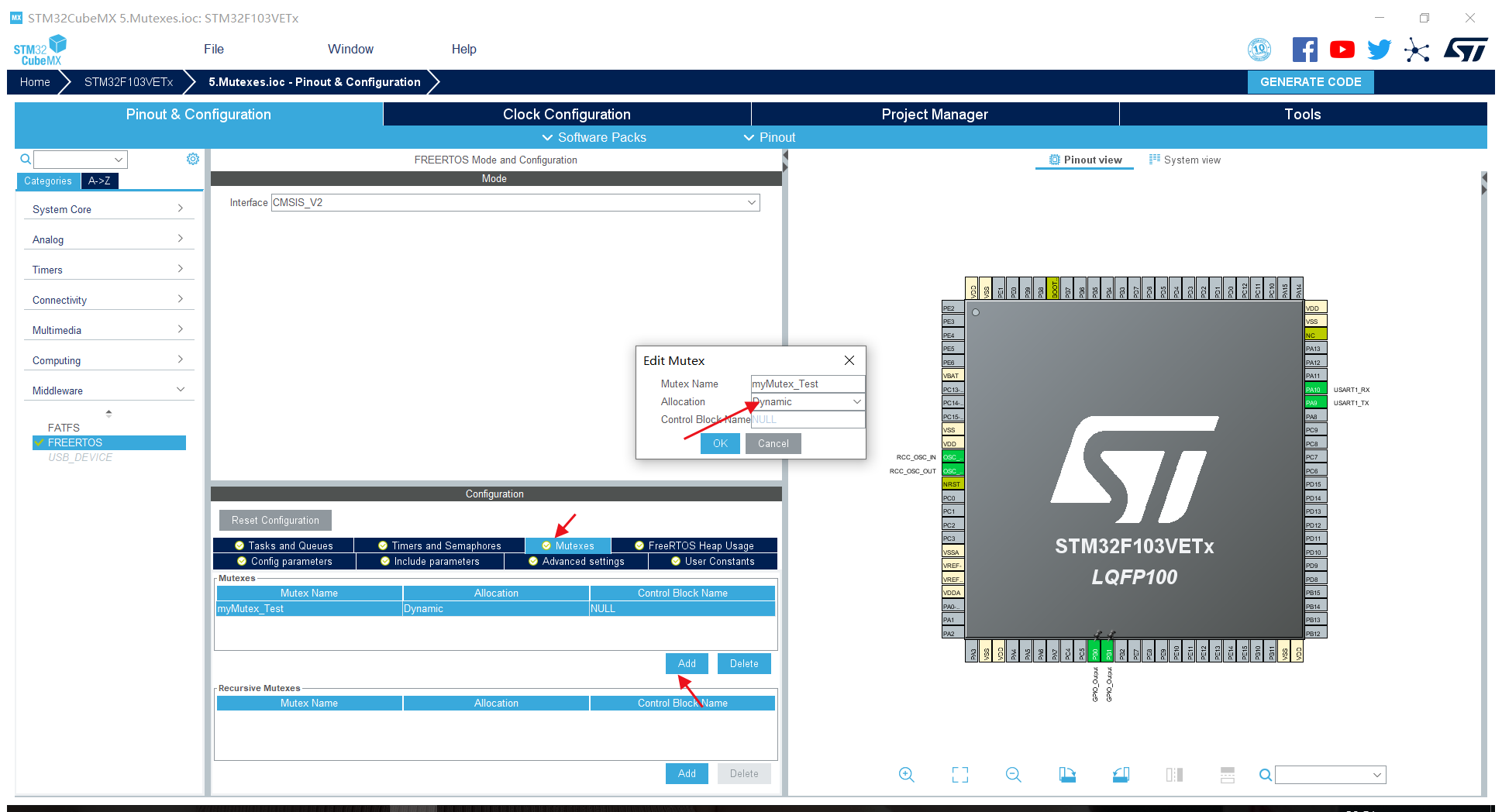
这个是互斥量的配置。
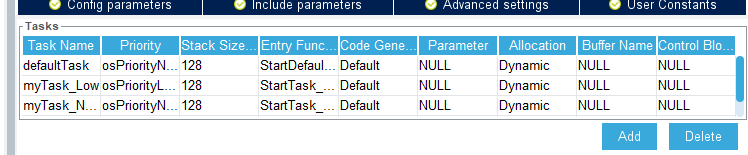
以及三个任务的配置
主要需要调用的API

实验主要代码:
void StartTask_Low(void *argument)
{
/* USER CODE BEGIN StartTask_Low */
osStatus_t xReturn;
int i;
/* Infinite loop */
for(;;)
{
xReturn=osMutexAcquire(myMutex_TestHandle,portMAX_DELAY);
if(xReturn==osOK)
{
printf("低优先级获得信号量\r\n");
}
for(i=0;i<0xffff;i++)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0);
}
xReturn=osMutexRelease(myMutex_TestHandle);
if(xReturn==osOK)
{
printf("低优先级释放信号量\r\n");
}
osDelay(1);
}
/* USER CODE END StartTask_Low */
}
/* USER CODE BEGIN Header_StartTask_Normal */
/**
* @brief Function implementing the myTask_Normal thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_Normal */
void StartTask_Normal(void *argument)
{
/* USER CODE BEGIN StartTask_Normal */
/* Infinite loop */
for(;;)
{
printf("中优先级启动\r\n");
vTaskDelay(1000);
osDelay(1);
}
/* USER CODE END StartTask_Normal */
}
/* USER CODE BEGIN Header_StartTask_High */
/**
* @brief Function implementing the myTask_High thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_High */
void StartTask_High(void *argument)
{
/* USER CODE BEGIN StartTask_High */
osStatus_t xReturn;
int i;
/* Infinite loop */
for(;;)
{
xReturn=osMutexAcquire(myMutex_TestHandle,portMAX_DELAY);
if(xReturn==osOK)
{
printf("最高优先级获得信号量\r\n");
}
for(i=0;i<50;i++)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1);
vTaskDelay(100);
}
xReturn=osMutexRelease(myMutex_TestHandle);
if(xReturn==osOK)
{
printf("最高优先级释放信号量\r\n");
}
osDelay(1);
}
/* USER CODE END StartTask_High */
}
freertos.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2022 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.priority = (osPriority_t) osPriorityNormal,
.stack_size = 128 * 4
};
/* Definitions for myTask_Low */
osThreadId_t myTask_LowHandle;
const osThreadAttr_t myTask_Low_attributes = {
.name = "myTask_Low",
.priority = (osPriority_t) osPriorityLow,
.stack_size = 128 * 4
};
/* Definitions for myTask_Normal */
osThreadId_t myTask_NormalHandle;
const osThreadAttr_t myTask_Normal_attributes = {
.name = "myTask_Normal",
.priority = (osPriority_t) osPriorityNormal,
.stack_size = 128 * 4
};
/* Definitions for myTask_High */
osThreadId_t myTask_HighHandle;
const osThreadAttr_t myTask_High_attributes = {
.name = "myTask_High",
.priority = (osPriority_t) osPriorityHigh,
.stack_size = 128 * 4
};
/* Definitions for myMutex_Test */
osMutexId_t myMutex_TestHandle;
const osMutexAttr_t myMutex_Test_attributes = {
.name = "myMutex_Test"
};
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void *argument);
void StartTask_Low(void *argument);
void StartTask_Normal(void *argument);
void StartTask_High(void *argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Create the mutex(es) */
/* creation of myMutex_Test */
myMutex_TestHandle = osMutexNew(&myMutex_Test_attributes);
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* creation of defaultTask */
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
/* creation of myTask_Low */
myTask_LowHandle = osThreadNew(StartTask_Low, NULL, &myTask_Low_attributes);
/* creation of myTask_Normal */
myTask_NormalHandle = osThreadNew(StartTask_Normal, NULL, &myTask_Normal_attributes);
/* creation of myTask_High */
myTask_HighHandle = osThreadNew(StartTask_High, NULL, &myTask_High_attributes);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_StartTask_Low */
/**
* @brief Function implementing the myTask_Low thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_Low */
void StartTask_Low(void *argument)
{
/* USER CODE BEGIN StartTask_Low */
osStatus_t xReturn;
int i;
/* Infinite loop */
for(;;)
{
xReturn=osMutexAcquire(myMutex_TestHandle,portMAX_DELAY);
if(xReturn==osOK)
{
printf("低优先级获得信号量\r\n");
}
for(i=0;i<0xffff;i++)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0);
}
xReturn=osMutexRelease(myMutex_TestHandle);
if(xReturn==osOK)
{
printf("低优先级释放信号量\r\n");
}
osDelay(1);
}
/* USER CODE END StartTask_Low */
}
/* USER CODE BEGIN Header_StartTask_Normal */
/**
* @brief Function implementing the myTask_Normal thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_Normal */
void StartTask_Normal(void *argument)
{
/* USER CODE BEGIN StartTask_Normal */
/* Infinite loop */
for(;;)
{
printf("中优先级启动\r\n");
vTaskDelay(1000);
osDelay(1);
}
/* USER CODE END StartTask_Normal */
}
/* USER CODE BEGIN Header_StartTask_High */
/**
* @brief Function implementing the myTask_High thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_High */
void StartTask_High(void *argument)
{
/* USER CODE BEGIN StartTask_High */
osStatus_t xReturn;
int i;
/* Infinite loop */
for(;;)
{
xReturn=osMutexAcquire(myMutex_TestHandle,portMAX_DELAY);
if(xReturn==osOK)
{
printf("最高优先级获得信号量\r\n");
}
for(i=0;i<50;i++)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1);
vTaskDelay(100);
}
xReturn=osMutexRelease(myMutex_TestHandle);
if(xReturn==osOK)
{
printf("最高优先级释放信号量\r\n");
}
osDelay(1);
}
/* USER CODE END StartTask_High */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/














 279
279











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









