






一、实物图片
二、实现过程
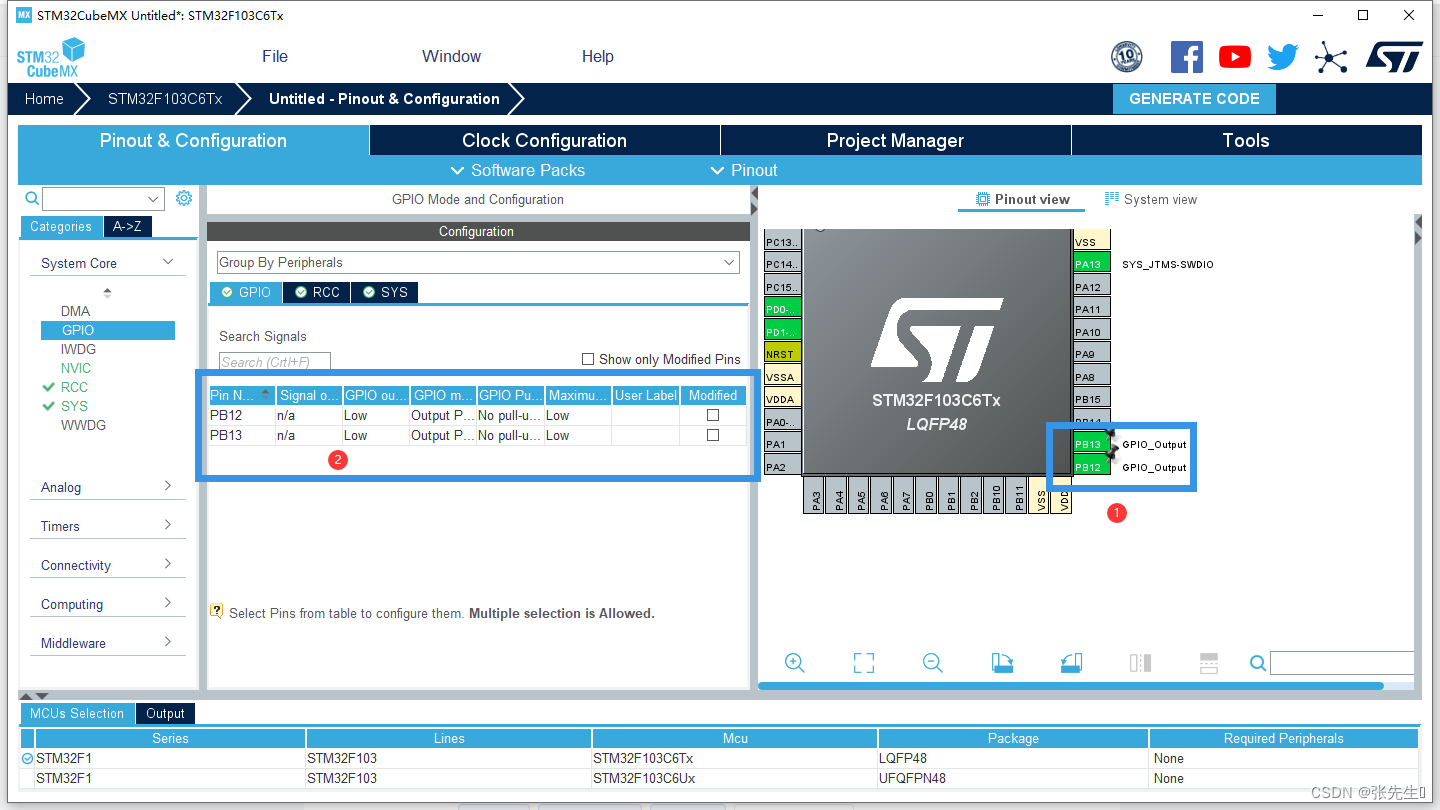
1、配置CubeMx
第一步:打卡CubeMX

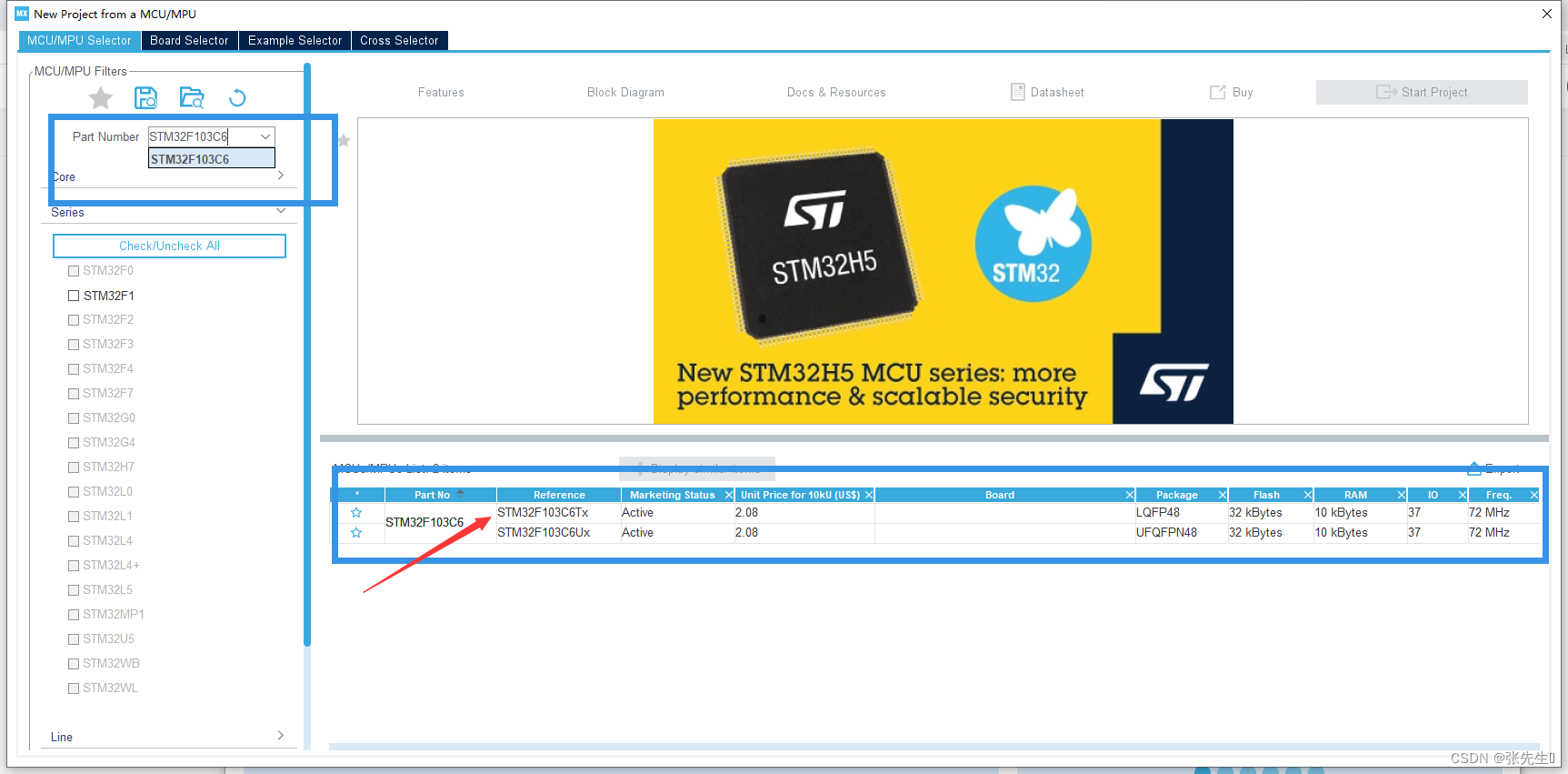
第二步:选取芯片
 第三步:打开芯片并配置下载器方式,选择SW。
第三步:打开芯片并配置下载器方式,选择SW。
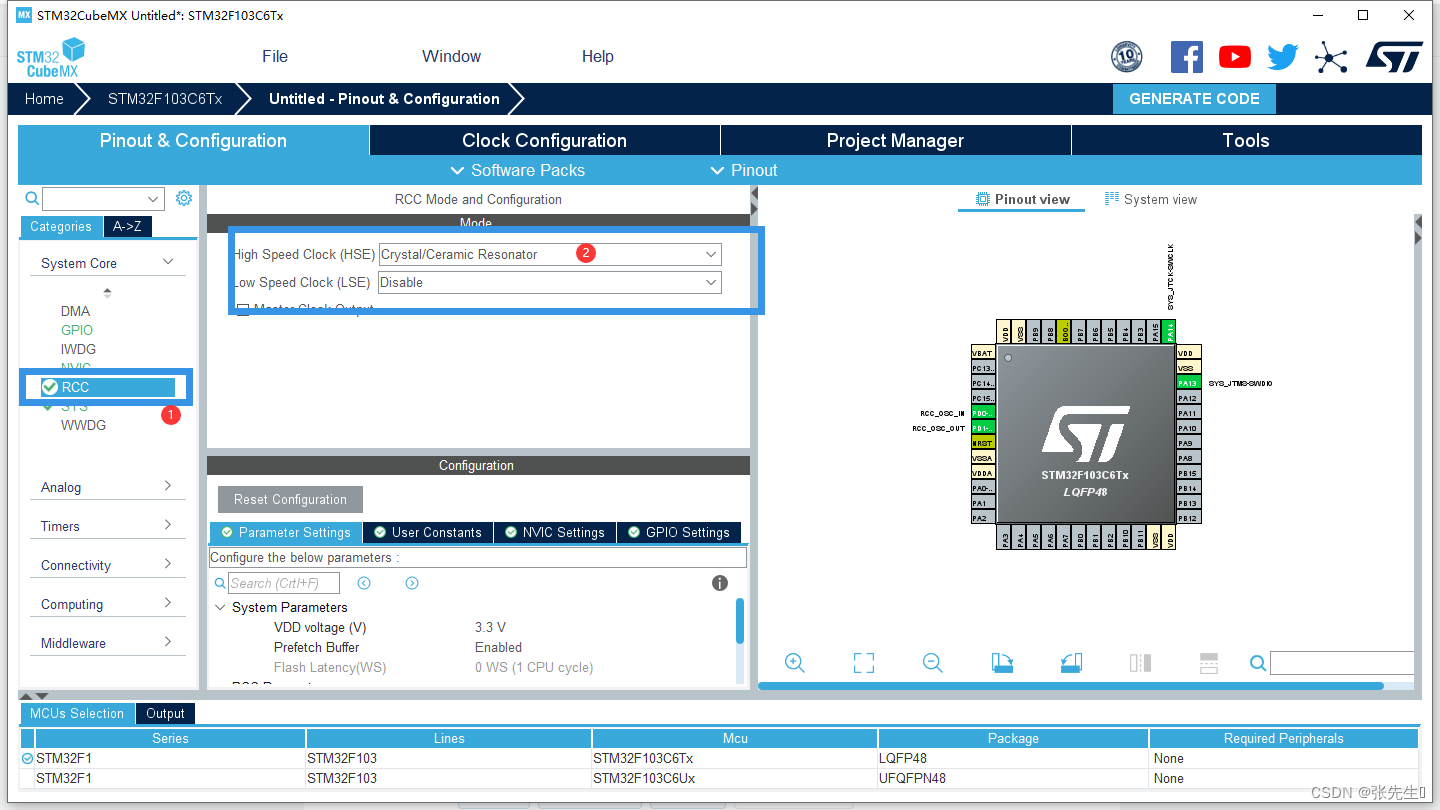
第四步:配置时钟
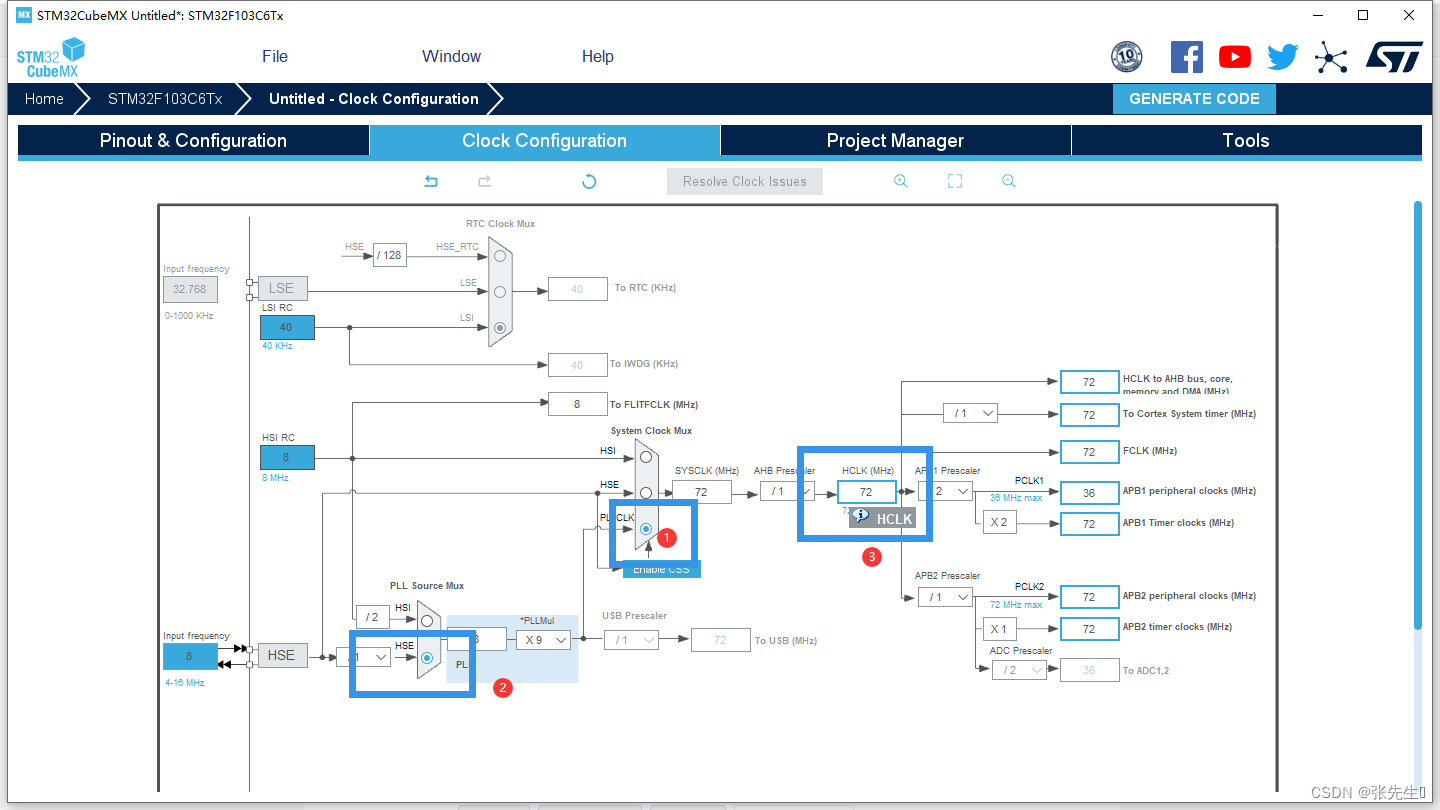
第五步:配置时钟树
第六步:配置GPIO引脚
第七步:生成工程

第八步:通过Keli打开工程

2、编写代码

1、MyI2c.c
//#include "stm32f10x.h" // Device header
//#include "Delay.h"
#include "main.h"
#include "Myl2c.h"
/**
* @brief ?????
* @param xus ????,??:0~233015
* @retval ?
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //????????
SysTick->VAL = 0x00; //???????
SysTick->CTRL = 0x00000005; //??????HCLK,?????
while(!(SysTick->CTRL & 0x00010000)); //?????0
SysTick->CTRL = 0x00000004; //?????
}
/**
* @brief ?????
* @param xms ????,??:0~4294967295
* @retval ?
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief ????
* @param xs ????,??:0~4294967295
* @retval ?
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
void MyI2C_W_SCL(uint8_t BitValue)
{
// GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,BitValue);
Delay_us(10);
}
void MyI2C_W_SDA(uint8_t BitValue)
{
// GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_11,BitValue);
Delay_us(10);
}
uint8_t MyI2C_R_SDA(void)
{
uint8_t BitValue;
// BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11);
BitValue = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_11);
Delay_us(10);
return BitValue;
}
//void MyI2C_Init(void)
//{
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
//
// GPIO_InitTypeDef GPIO_InitStructure;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GPIOB, &GPIO_InitStructure);
//
// GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11);
//}
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);
MyI2C_W_SCL(0);
}
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0);
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
}
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++)
{
MyI2C_W_SDA(Byte & (0x80 >> i));
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
}
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00;
MyI2C_W_SDA(1);
for (i = 0; i < 8; i ++)
{
MyI2C_W_SCL(1);
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}
MyI2C_W_SCL(0);
}
return Byte;
}
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
AckBit = MyI2C_R_SDA();
MyI2C_W_SCL(0);
return AckBit;
}
2、MyI2c.h
#ifndef __MYI2C_H
#define __MYI2C_H
#include "main.h"
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
//void MyI2C_Init(void);
void MyI2C_Start(void);
void MyI2C_Stop(void);
void MyI2C_SendByte(uint8_t Byte);
uint8_t MyI2C_ReceiveByte(void);
void MyI2C_SendAck(uint8_t AckBit);
uint8_t MyI2C_ReceiveAck(void);
#endif
3、MPU6050_Reg.h
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C
#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#endif
4、MPU6050.c
//#include "stm32f10x.h" // Device header
#include "main.h"
#include "Myl2c.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_SendByte(Data);
MyI2C_ReceiveAck();
MyI2C_Stop();
}
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS | 0x01);
MyI2C_ReceiveAck();
Data = MyI2C_ReceiveByte();
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}
void MPU6050_Init(void)
{
// MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
5、MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
#include "main.h"
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif
6、main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "Myl2c.h"
#include "MPU6050.h"
#include "math.h"
#include <stdbool.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define LED_HIGH HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);
#define LED_LOW HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET);
uint8_t falg=0;
uint8_t case_falg = 0;
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
uint8_t data_MPU[10];
uint8_t number = 0;
bool take_up = false;
uint32_t count_tim = 0;
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if (htim->Instance == TIM2){
number++;
data_MPU[number%10]=case_falg;
for(int i = 0;i<10;i++){
if(data_MPU[i] == 1){
take_up = true;
break;
}else{
take_up = false;
}
}
if(take_up == true){
count_tim++;
}else{
count_tim = 0;
}
}
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
I2C_init();
MPU6050_Init();
ID = MPU6050_GetID();
HAL_TIM_Base_Init(&htim2);//启动定时器
HAL_TIM_Base_Start_IT(&htim2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
if(abs(GX)>50||abs(GY)>50||abs(GZ)>50){
case_falg = 1;
LED_HIGH
}else{
case_falg = 0;
LED_LOW
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
最后,工程可以通过私信的方式问我要,也可以自行下载,怎么方便怎么来吧,要我也不收费,下载,好像也没什么收入,自行选择即可!!!!
链接:https://pan.baidu.com/s/17X0iAcFTwAscuroiw_9Ykw?pwd=zru1
提取码:zru1
--来自百度网盘超级会员V2的分享















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









