







 本文介绍了MPU6050六轴传感器(包含三轴陀螺仪和三轴加速度计)的工作原理,并指出原始数据需要经过滤波和姿态融合解算。对于初学者,卡尔曼滤波和姿态解算具有一定的挑战。幸运的是,MPU6050的DMP(数字运动处理器)内置了滤波算法,可直接提供横滚角、航向角和偏航角。提供了基于STM32的DMP初始化代码,只需将相关文件添加到项目中即可直接使用,降低了开发难度。
本文介绍了MPU6050六轴传感器(包含三轴陀螺仪和三轴加速度计)的工作原理,并指出原始数据需要经过滤波和姿态融合解算。对于初学者,卡尔曼滤波和姿态解算具有一定的挑战。幸运的是,MPU6050的DMP(数字运动处理器)内置了滤波算法,可直接提供横滚角、航向角和偏航角。提供了基于STM32的DMP初始化代码,只需将相关文件添加到项目中即可直接使用,降低了开发难度。
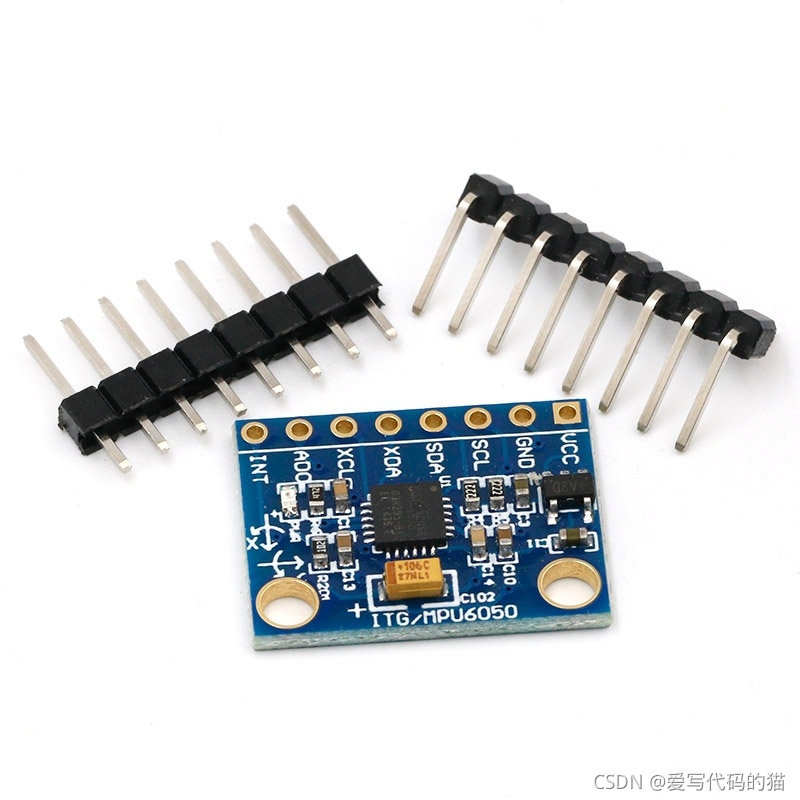
mpu6050是一个六轴传感器包括三轴陀螺仪和三轴加速度,分别可以测得三轴的角速度、加速度。但是一般传感器的原始数据都不能直接直接拿来用,都需要滤波和姿态融合解算。对于初学者来说卡尔曼滤波和姿态融合解算有一定的难度。但是MPU6050芯片内自带了一个数据处理子模块DMP,已经内置了滤波算法,可以直接输出横滚角、航向角、偏航角。下面我们给出相应的基于stm32的DMP初始化代码,在项目中添加相应的文件就可直接使用。
http://链接:https://pan.baidu.com/s/1J7JQGaUN1Hm-IT3WJ8ejvg 提取码:35oa
将MPU6050文件夹内的文件添加到项目中就能使用了
![]()



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











