







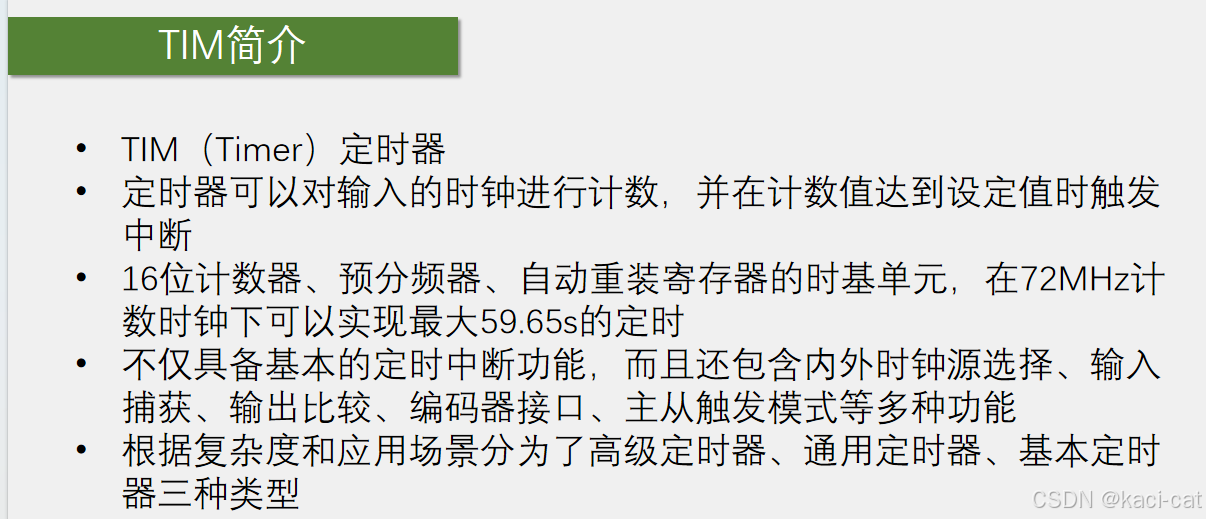
定时器简介
定时器分类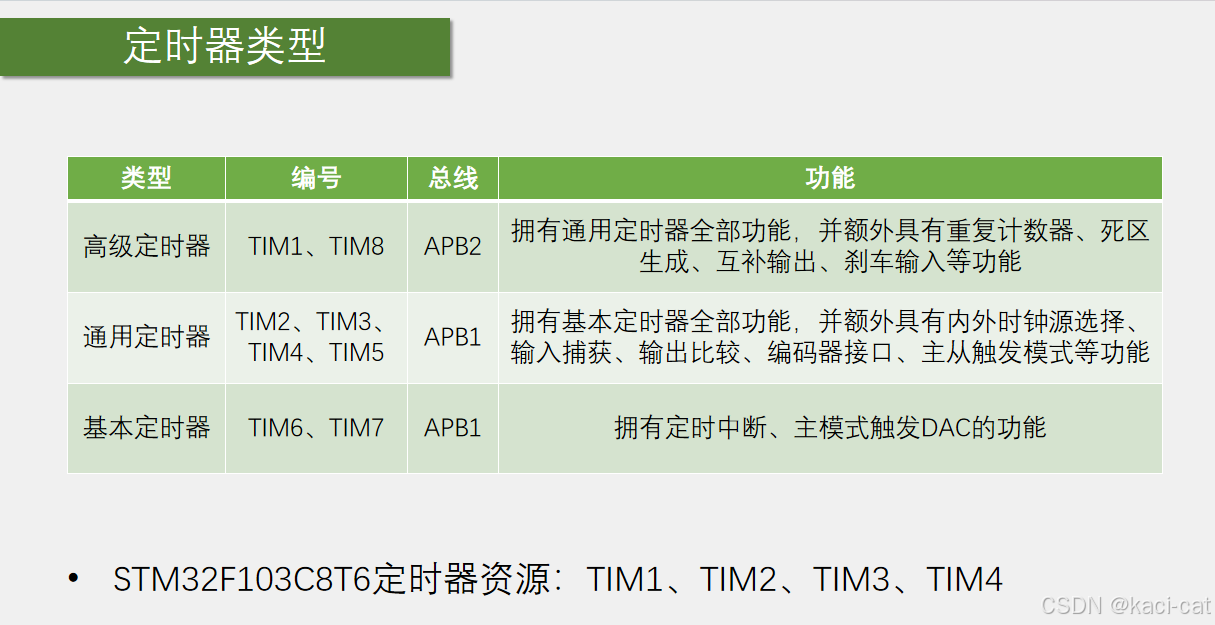
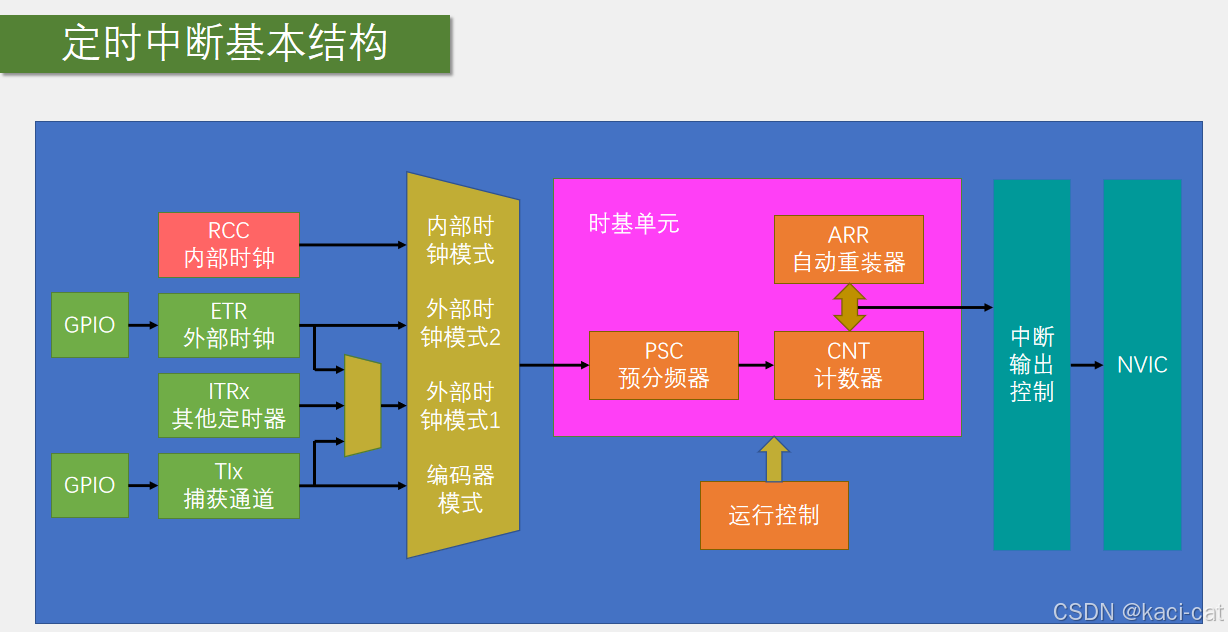
定时器中断基本结构
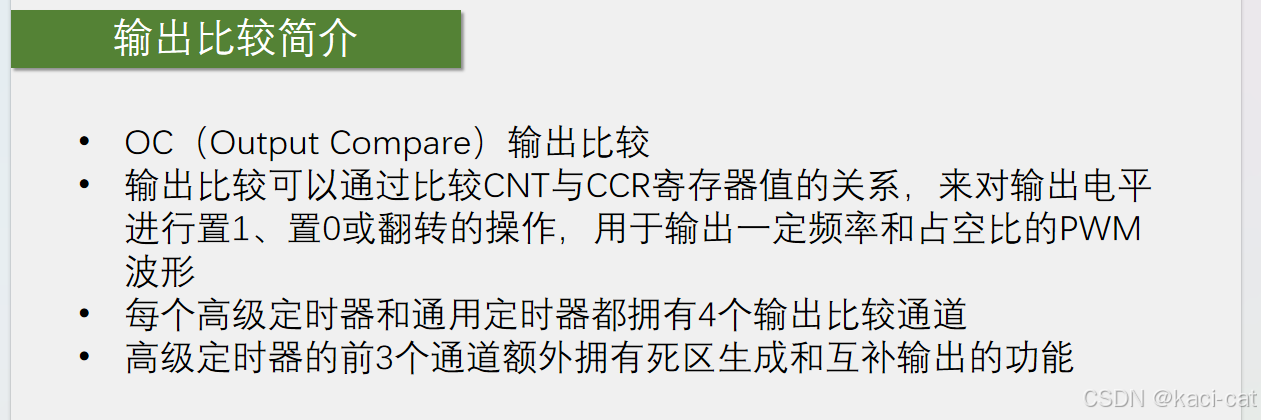
输出比较
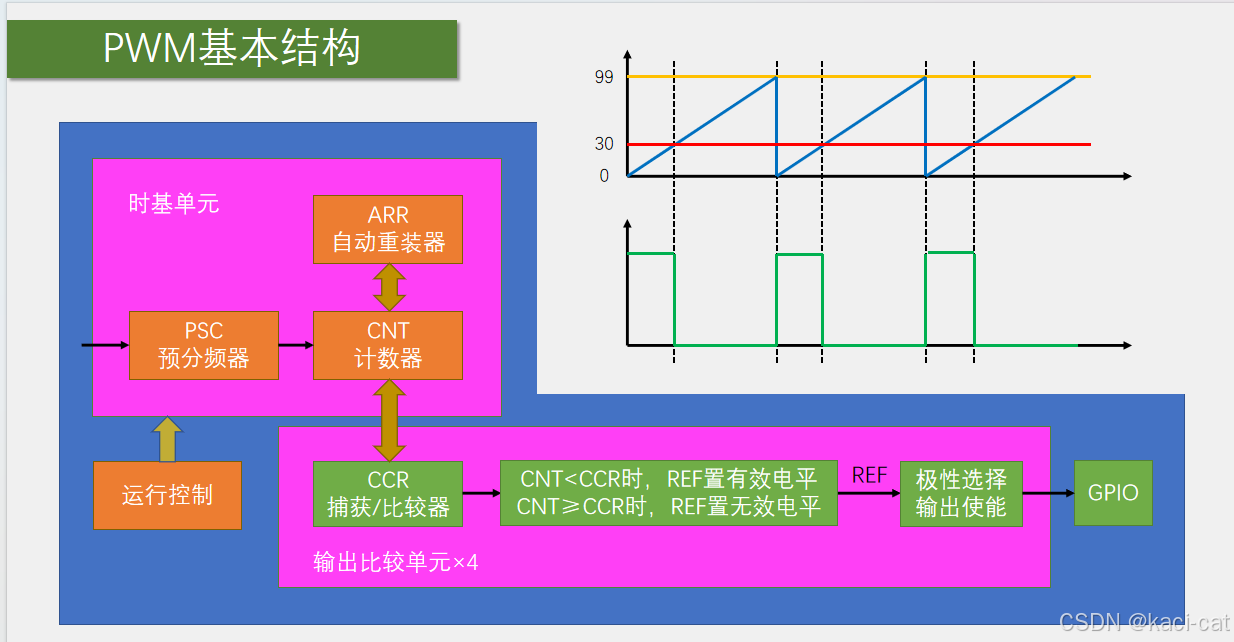
PWM基本结构
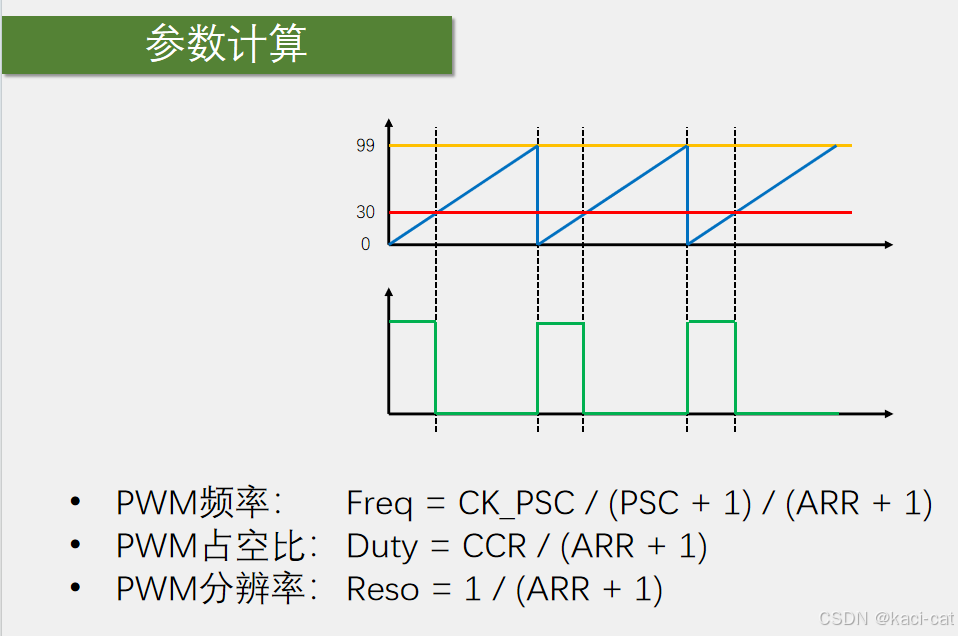
参数计算
代码示例
一 、编程要点
1.定时器使能与配置TIM定时器结构体
2.开启定时器对应GPIO口时钟以及初始化
3.配置
二、例程软硬件支持
本例程以STM32F103C8T6为例,使用固件库函数编写,具体PWM输出实验现象是三色灯的控制,用PWM波控制红绿蓝三色灯的亮度可以使小灯展现出不同的颜色。
三、代码
PWM.c文件
由STM32引脚定义表可知TIM2对应的GPIO口为GPIOA 0/1/2/3四个口,在代码部分分别使能TIM2定时器和GPIOA口。

void PWM_Init(void)
{
//时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//GPIO口配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置定时器TIM2的时钟源为内部时钟。
TIM_InternalClockConfig(TIM2);
//TIM2参数配置
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);//对OC进行初始化赋默认值;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR的初始值,可用TIM_SetCompare1函数更改
//CCR可以理解为PWM波高低电平的分界值,参数大于CCR时输出高或者低电平,小于则反之,设置几个 不同的CCR就可以输出几路不同PWM波
TIM_OC1Init(TIM2, &TIM_OCInitStructure);//PA0口PWM波
TIM_OC2Init(TIM2, &TIM_OCInitStructure);//PA1口PWM波
TIM_OC3Init(TIM2, &TIM_OCInitStructure);//PA2口PWM波
//TIM_OC4Init(TIM2, &TIM_OCInitStructure);//PA3口PWM波
TIM_Cmd(TIM2, ENABLE);
}
//对应TIM_OCInit()函数
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2, Compare); //设置CCR值
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM2, Compare); //设置CCR值
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare); //设置CCR值
}
void PWM_SetCompare4(uint16_t Compare)
{
TIM_SetCompare4(TIM2, Compare); //设置CCR值
}
rainbow.c
1 #include "stm32f10x.h"
#include "PWM.h"
//关闭所有灯
void offall()
{
PWM_SetCompare1(0);
PWM_SetCompare2(0);
PWM_SetCompare3(0);
}
//亮红色;
void red ()
{
PWM_SetCompare1(100);
}
//亮橙色;
void orange()
{
PWM_SetCompare1(100);
PWM_SetCompare2(65);
}
//亮黄色;
void yellow()
{
PWM_SetCompare1(100);
PWM_SetCompare2(100);
}
//亮绿色;
void green ()
{
PWM_SetCompare2(100);
}
//亮青色;
void cyan()
{
PWM_SetCompare2(100);
PWM_SetCompare3(100);
}
//亮蓝色;
void blue ()
{
PWM_SetCompare3(100);
}
//亮紫色;
void purple()
{
PWM_SetCompare1(100);
PWM_SetCompare3(100);
}延时函数懒得写了main函数如下
#include "stm32f10x.h" // Device header
#include "delay.h"
#include "PWM.h"
#include "Rainbow.h"
uint8_t i=0;
int main(void)
{
PWM_Init();
while(1)
{
red ();
Delay_s(1);
offall();
orange();
Delay_s(1);
offall();
yellow();
Delay_s(1);
offall();
green ();
Delay_s(1);
offall();
cyan();
Delay_s(1);
offall();
blue ();
Delay_s(1);
offall();
purple();
Delay_s(1);
offall();
}
}
















 584
584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









