







粒子群算法(PSO)是一种基于群体的随机优化技术,与其他基于群体的进化算法相比,他们均初始化为一组随机解,通过迭代搜寻最优解。不同的是,进化算法遵循适者生存原则,而PSO模拟社会,将每个可能产生的解表述为群中的一个微粒,每个微粒都具有自己的位置向量和速度向量,以及一个由目标函数决定的适应度,所有微粒在搜索空间中以一定的速度飞行,通过追随当前搜索到的最优值来搜索全局最优值。
——《Matlab智能算法 超级学习手册》
-
一般粒子群算法的基本原理
设在一个S维的搜索空间中,有m个粒子组成一个群体。每个粒子拥有自己的位置坐标以及飞行速度,分别记作 和
和 ,
, 。每个粒子所对应的适应值为
。每个粒子所对应的适应值为 。记第i个粒子迄今搜素到的最优位置为:
。记第i个粒子迄今搜素到的最优位置为: ,所有粒子至今搜索到的最优位置为
,所有粒子至今搜索到的最优位置为 。
。
设所求目标为 的极大值,则微粒i当前最好位置为:
的极大值,则微粒i当前最好位置为:

迭代时,使用下式对粒子进行操作:

 为t+1步时,第i个粒子的速度。1式第一项中,w为非负常量,称作动力常量,控制前一速度对后一速度的影响;第二项中,c1为自我学习因数,控制粒子飞向自身搜索最优解;第三项中,c2为社会影响因数,控制粒子飞向粒子社会迄今搜索到的最优解。为了防止粒子飞行飞出定义域,通常为粒子速度和粒子位置设置限制,即
为t+1步时,第i个粒子的速度。1式第一项中,w为非负常量,称作动力常量,控制前一速度对后一速度的影响;第二项中,c1为自我学习因数,控制粒子飞向自身搜索最优解;第三项中,c2为社会影响因数,控制粒子飞向粒子社会迄今搜索到的最优解。为了防止粒子飞行飞出定义域,通常为粒子速度和粒子位置设置限制,即 和
和 。
。
综上,一般PSO求解极值问题的步骤为:
1,初始化粒子个数m,各粒子初始坐标,速度。
2,计算每个粒子的适应值。
3,对每个粒子将其适应值和其经历过的最好的位置的适应值进行比较,若较好,则将其本次位置作为 当前的最好位置。
4,对每个粒子将其适应值和全局经历过的最好位置的适应值进行比较,若较好,则将其本次位置作为 当前的全局最好位置。
5,根据式1和式2分别对粒子的速度和位置进行更新。
6,若满足终止条件,则输出解,否则返回第二步。
——《Matlab智能算法 超级学习手册》

PSO求解极值问题流程图
*图片感谢胡哥
-
使用粒子群算法求解函数极值
在工程实际问题中,经常需要求解一些非线性方程的根,这些非线性方程根很难找出解析解,粒子群算法则很好的解决了这个问题。
-
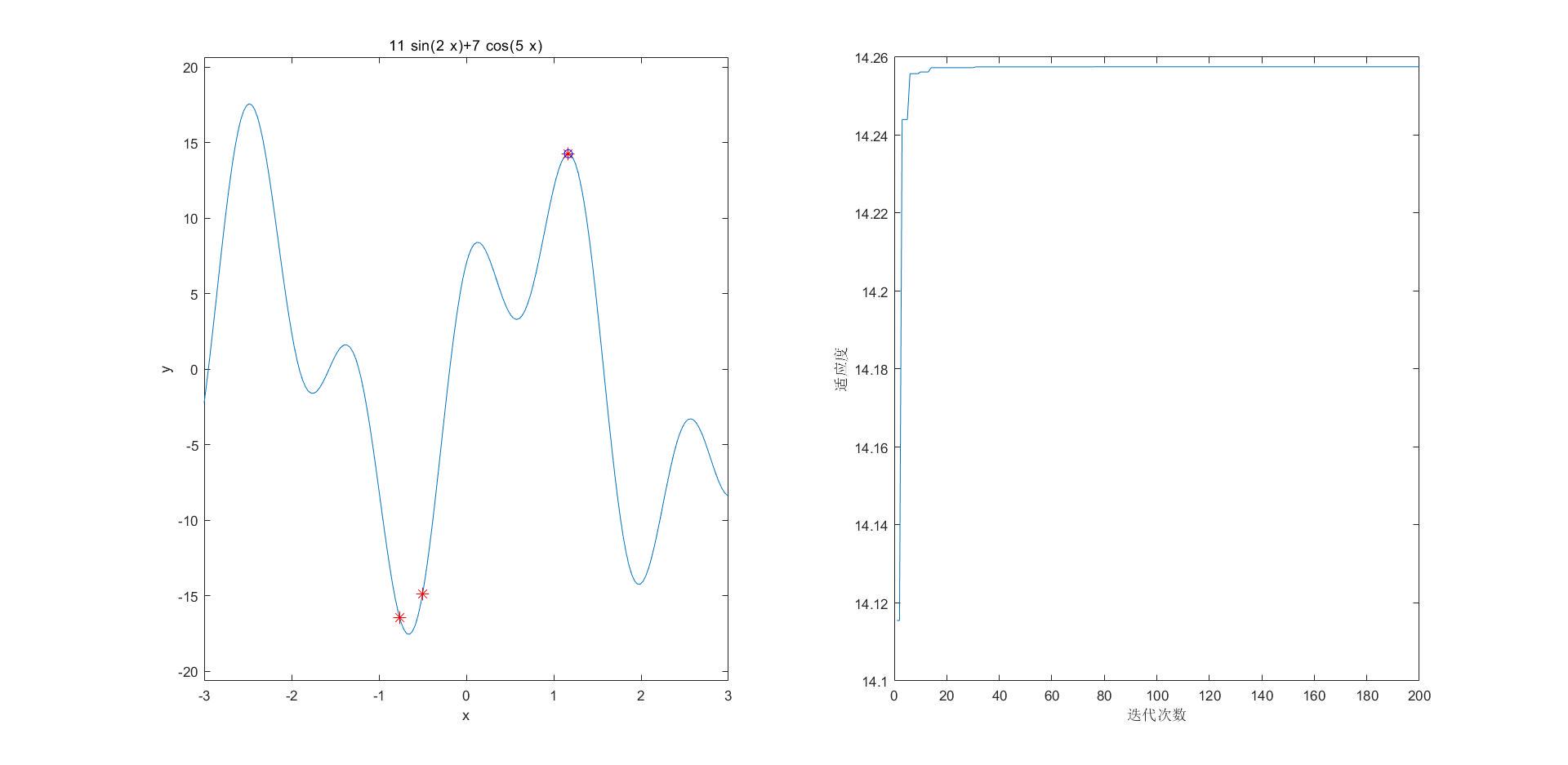
使用一般粒子群算法求解一元函数最大值。
clc
clear
close all;
%% 目标函数定义
f=@(x)11.*sin(2.*x)+7*cos(5.*x); %函数定义
lb=-3; %函数定义域下界
ub=3; %函数定义域上界
figure(1); %开辟图形窗口
subplot(1,2,1); %分割图形窗口
ezplot(f,[lb ub]); %绘制函数图像
xlabel('x'); %设置坐标轴x
ylabel('y'); %设置坐标轴y
hold on; %绘图保持命令
%% 算法参数初始化
m=10; %粒子数
vlimit=1.2; %速度界限
N=100; %迭代次数
w=0.9; %惯性影响因数
c1=0.5; %自我学习因数
c2=0.5; %社会影响因数
x=rand(m,1)*(ub-lb)+lb; %粒子坐标初始化
v=-vlimit+2*vlimit*rand(m,1); %粒子速度初始化
y=f(x); %粒子初始化后适应值
xbest=x; %粒子自身学习到的最优坐标
ybest=y; %粒子自身学习到的最优值
ysbest=max(y); %粒子群社会当前最优值
xsbest=x(y==max(y)); %粒子群社会当前最优值坐标
BestY=[]; %存放每次迭代的社会最优适应值
BestX=xsbest; %存放每次迭代的社会最优适应值对应的x坐标
h=scatter(x,y,80,'*r'); %绘制散点图并返回图形句柄
%% 迭代计算
while N
v=w.*v+c1.*(xbest-x)+c2.*(BestX-x); %粒子速度更新
for i=1:m %粒子速度上下界约束
if v(i,1)>vlimit %若粒子速度正向过大
v(i,1)=vlimit; %粒子速度为正向最大值
elseif vlimit<-v(i,1) %若粒子速度反向过大
v(i,1)=-vlimit; %粒子速度为反向最大值
end
end
x=x+v; %粒子位置更新
for i=1:m %粒子位置上下界约束
if x(i,1)>ub %若粒子位置正向过大
x(i,1)=ub; %粒子位置为定义域上界
elseif x(i,1)<lb %若粒子位置反向过大
x(i,1)=lb; %粒子位置为定义域下界
end
end
y=f(x); %重新计算各粒子适应值
for i=1:m %遍历所有粒子
if y(i)>ybest(i) %若当前结果较好
ybest(i)=y(i); %更新第i个粒子的自身最好经验值
xbest(i)=x(i); %更新第i个粒子的自身最好经验坐标
end
end
BestY=[BestY,max(ybest)]; %更新每次迭代的社会最优适应值
for i=1:m
if BestY(end)==max(BestY) %本次是最优则更新,本次不是最优不更新
if ybest(i)==max(ybest)
BestX=xbest(i); %更新每次迭代的社会最优适应值对应的x坐标
break;
end
end
end
pause(0.01); %延时观察散点图趋势
h.XData=x; %更新散点图x坐标
h.YData=y; %更新散点图y坐标
N=N-1; %循环计数
end
%% 结果输出
plot(BestX,BestY(end),'bo') %绘制最终结果
subplot(1,2,2); %分割图形窗口
plot(BestY); %绘制出每次迭代最佳适应度的变化图
xlabel('迭代次数'); %设置坐标轴x
ylabel('适应度'); %设置坐标轴y
disp('最佳的位置是:'); disp(BestX) %结果输出
disp('此时最优值是:'); disp(BestY(end)) %结果输出正常的运行结果是这样:

当然,由于只是一般的PSO,算法容易陷入局部最优解。
-
使用一般粒子群算法求解二元函数最大值。
clc
clear
close all;
%% 目标函数定义
xlb=-5; %函数x定义域下界
xub=5; %函数x定义域上界
ylb=-5; %函数y定义域下界
yub=5; %函数y定义域上界
lx=xlb:0.05:xub; %x向量
ly=ylb:0.05:yub; %y向量
[X,Y]=meshgrid(lx,ly); %x,y向量构建网格采样点
F=Y.*sin(10.*X)-X.*sin(Y); %二维函数定义
%F=50-X.^2-Y.^2;
figure(1); %开辟图形窗口
subplot(1,2,1); %分割图形窗口
mesh(X,Y,F); %二维函数绘制
xlabel('x'); %设置坐标轴x
ylabel('y'); %设置坐标轴y
zlabel('z'); %设置坐标轴z
hold on; %绘图保持命令
%% 算法参数初始化
m=50; %粒子数
s=2; %维数
vxlimit=(xub-xlb)*0.05; %x速度界限
vylimit=(yub-ylb)*0.05; %y速度界限
N=100; %迭代次数
w=0.9; %惯性影响因数
c1=0.5; %自我学习因数
c2=0.5; %社会影响因数
x=rand(m,1)*(xub-xlb)+xlb; %粒子x坐标初始化
y=rand(m,1)*(yub-ylb)+ylb; %粒子y坐标初始化
vx=-vxlimit+2*vxlimit*rand(m,1); %粒子x向速度初始化
vy=-vylimit+2*vylimit*rand(m,1); %粒子y向速度初始化
z=y.*sin(10.*x)-x.*sin(y); %粒子初始化后适应值(m个粒子,m个适应值)
xbest=x; %粒子自身学习到的最优x坐标
ybest=y; %粒子自身学习到的最优y坐标
zbest=z; %粒子自身学习到的最优z值
zsbest=max(z); %粒子群社会当前最优值
xsbest=x(z==max(z)); %粒子群社会当前最优值x坐标
ysbest=y(z==max(z)); %粒子群社会当前最优值y坐标
BestZ=[]; %存放每次迭代的社会最优适应值
BestX=xsbest; %存放每次迭代的社会最优适应值对应的x坐标
BestY=ysbest; %存放每次迭代的社会最优适应值对应的y坐标
h=scatter3(x,y,z,80,'*r'); %绘制散点图并返回图形句柄
%% 迭代计算
while N
vx=w.*vx+c1.*(xbest-x)+c2.*(BestX-x); %粒子x速度更新
vy=w.*vy+c1.*(ybest-y)+c2.*(BestY-y); %粒子x速度更新
for i=1:m %粒子x速度上下界约束
if vx(i,1)>vxlimit %若粒子x速度正向过大
vx(i,1)=vxlimit; %粒子x速度为正向最大值
elseif vxlimit<-vx(i,1) %若粒子x速度反向过大
vx(i,1)=-vxlimit; %粒子x速度为反向最大值
end
if vy(i,1)>vylimit %若粒子y速度正向过大
vy(i,1)=vylimit; %粒子y速度为正向最大值
elseif vylimit<-vy(i,1) %若粒子y速度反向过大
vy(i,1)=-vylimit; %粒子y速度为反向最大值
end
end
x=x+vx; %粒子x位置更新
y=y+vy; %粒子y位置更新
for i=1:m %粒子位置上下界约束
if x(i,1)>xub %若粒子位置正向过大
x(i,1)=xub; %粒子位置为定义域上界
elseif x(i,1)<xlb %若粒子位置反向过大
x(i,1)=xlb; %粒子位置为定义域下界
end
if y(i,1)>yub %若粒子y位置正向过大
y(i,1)=yub; %粒子y位置为定义域上界
elseif y(i,1)<ylb %若粒子y位置反向过大
y(i,1)=ylb; %粒子y位置为定义域下界
end
end
z=y.*sin(10.*x)-x.*sin(y); %重新计算各粒子适应值
for i=1:m %遍历所有粒子
if z(i)>zbest(i) %若当前结果较好
zbest(i)=z(i); %更新第i个粒子的自身最好经验z值
xbest(i)=x(i); %更新第i个粒子的自身最好经验x坐标
ybest(i)=y(i); %更新第i个粒子的自身最好经验y坐标
end
end
BestZ=[BestZ,max(zbest)]; %更新每次迭代的社会最优适应值
for i=1:m
if BestZ(end)==max(BestZ) %本次是最优则更新,本次不是最优不更新
if zbest(i)==max(zbest)
BestX=xbest(i); %更新每次迭代的社会最优适应值对应的x坐标
BestY=ybest(i); %更新每次迭代的社会最优适应值对应的y坐标
break;
end
end
end
% pause(0.01); %延时观察散点图趋势
h.XData=x; %更新散点图x坐标
h.YData=y; %更新散点图y坐标
h.ZData=z; %更新散点图y坐标
N=N-1; %循环计数
end
%% 结果输出
plot3(BestX,BestY,BestZ(end),'bo') %绘制最终结果
subplot(1,2,2); %分割图形窗口
plot(BestZ); %绘制出每次迭代最佳适应度的变化图
xlabel('迭代次数'); %设置坐标轴x
ylabel('适应度'); %设置坐标轴y
disp('最佳的x位置是:'); disp(BestX) %结果输出
disp('最佳的y位置是:'); disp(BestY) %结果输出
disp('此时最优z值是:'); disp(BestZ(end)) %结果输出运行结果如下:

但仍易于陷入局部最优解:

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











