






《Large Language Models for Autonomous Driving (LLM4AD): Concept, Benchmark, Simulation, and Real-Vehicle Experiment》2024年10月发表,来自普渡大学和北美丰田汽车的论文。
随着大型语言模型(LLMs)的广泛使用和高度成功的开发,人们对将LLMs应用于自动驾驶技术的兴趣和需求日益增长。在自然语言理解和推理能力的推动下,LLMs有可能增强自动驾驶系统的各个方面,从感知和场景理解到语言交互和决策。本文首先介绍了设计用于自动驾驶的LLM(LLM4AD)的新概念。然后,我们提出了一个全面的基准来评估LLM4AD在仿真中的指令跟随能力。此外,我们在真实的车辆平台上进行了一系列实验,全面评估了我们的LLM4AD系统的性能和潜力。最后,我们设想了LLM4AD的主要挑战,包括延迟、部署、安全和隐私、安全、信任和透明度以及个性化。我们的研究强调了LLM在增强自动驾驶汽车技术各个方面的巨大潜力,从感知和场景理解到语言交互和决策。
1. 研究背景与动机
-
自动驾驶的挑战:传统自动驾驶系统在自然语言交互、上下文推理和个性化适应方面存在局限性,尤其在理解模糊的人类指令和情感表达时表现不足。
-
LLM的潜力:大型语言模型(LLM)凭借其自然语言理解、零样本推理和持续学习能力,有望提升自动驾驶系统的决策、交互和个性化能力。论文提出LLM4AD(LLM for Autonomous Driving)框架,旨在将LLM深度整合到自动驾驶技术中。
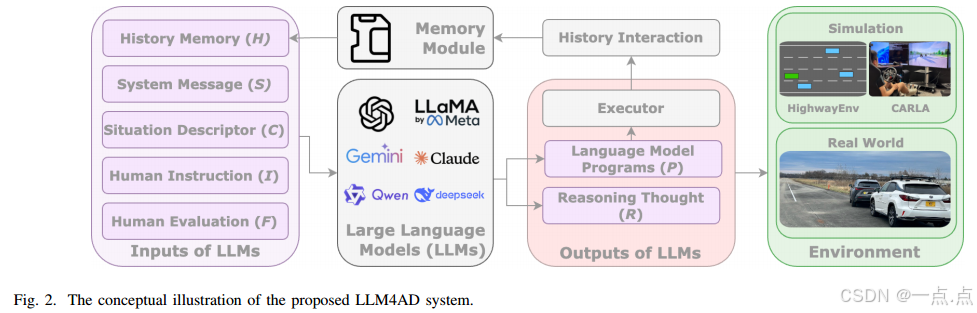
2. LLM4AD框架设计
-
核心架构:LLM作为决策“大脑”,与感知模块(“眼睛”)和控制模块(“手”)分离,通过以下模块协同工作:
-
输入模块:包括人类指令(II)、系统消息(SS)、情境描述(CC)和历史记忆(HH)。
-
输出模块:生成可执行的语言模型程序(LMP,如调整车速或转向角)和推理思路(RR),提升决策透明性。
-
执行器(Executor):将LMP转化为具体的控制指令(如ROS话题命令)。
-
-
关键技术:
-
链式思维提示(Chain-of-Thought Prompting):增强LLM的推理逻辑。
-
记忆模块:存储用户历史交互数据,支持个性化驾驶策略。
-
3. 仿真基准测试
-
数据集与指标:
-
LaMPilot-Bench(基于HighwayEnv):包含4.9K半人工标注场景,评估安全性(TTC、速度方差)、效率(任务完成时间)和指令跟随能力。
-
CARLA Leaderboard 1.0:在复杂城市环境中测试导航、交通协商等任务,使用路线完成率(RC)、违规惩罚(IP)和驾驶评分(DS)作为指标。
-
-
实验结果:
-
零样本/少样本学习:GPT-4在LaMPilot-Bench的任务完成率从20.4%(零样本)提升至63.3%(三样本)。
-
人类反馈集成:结合人类反馈后,GPT-4的驾驶评分(DS)达到64.0,接近强化学习专家模型(如Roach)。
-
局限性:LLM生成的策略在复杂场景(如突发车辆切入)中仍存在碰撞风险,主要因推理延迟和未来动作预测不足。
-
4. 真实车辆实验
-
云端LLM(Talk2Drive):
-
个性化决策:通过Whisper语音识别、OpenWeather天气数据整合和记忆模块,实现指令翻译(如“开保守点”→降低目标车速)。
-
实验结果:接管率(Takeover Rate)最高降低76.9%,驾驶评分显著优于传统规则系统。
-
-
车载VLM(视觉语言模型):
-
多模态输入:融合视觉信息(天气、路况)和语言指令,生成PID/MPC控制器参数。
-
高效部署:基于Qwen-VL的8B参数模型,通过LoRA微调和4-bit量化实现边缘部署,延迟降至1.2-1.8秒。
-
RAG增强记忆:利用向量数据库(Chroma)检索历史场景,提升个性化响应一致性。
-
5. 关键挑战
-
延迟:云端LLM的端到端延迟(1.2-5秒)难以满足实时控制需求,需与低延迟传统系统协同。
-
部署:车载硬件算力有限,需通过模型压缩(如AWQ量化)、知识蒸馏优化LLM。
-
安全与隐私:
-
对抗攻击:语义级攻击(如恶意指令注入)和模型后门风险。
-
数据隐私:用户交互数据(路线偏好、语音特征)需强化加密和差分隐私保护。
-
-
信任与透明性:LLM生成的决策解释需与真实控制逻辑一致,避免“解释失配”。
-
个性化与安全的平衡:紧急指令(如“赶去医院”)需在加速需求与安全约束间动态权衡。
6. 贡献与展望
-
贡献:
-
提出首个LLM4AD框架,验证LLM在仿真和真实场景中的可行性。
-
发布LaMPilot-Bench基准,推动LLM在自动驾驶领域的标准化评估。
-
通过云端和车载实验,证明个性化与安全增强的潜力。
-
-
未来方向:
-
多模态LLM(融合视觉、雷达等传感器数据)。
-
低延迟、高可靠性的边缘LLM部署方案。
-
安全验证框架(如形式化验证、对抗测试)。
-
总结
该论文系统性地探索了LLM在自动驾驶中的应用,从框架设计、基准测试到真实场景验证,展示了LLM在提升交互能力、个性化和复杂决策方面的潜力,同时揭示了延迟、安全等关键挑战,为后续研究提供了重要参考。
如果此文章对您有所帮助,那就请点个赞吧,收藏+关注 那就更棒啦,十分感谢!!!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









