






参考其他博主文章,源码下载安装moveit以及ompl时出现问题。
问题1.
命令
wstool merge -t src https://raw.githubusercontent.com/ros-planning/moveit/master/moveit.rosinstall报错ERROR in config: Unable to download URL [https://raw.githubusercontent.com/r 延迟错误不能连接githubuserconnect
解决:
1.1进入源码安装目录 ws_moveit/src/,按ctrl+h显示隐藏文件, 进入文件夹打开.rosinstall
1.2替换如下代码并保存退出
# This file is intended for users who want to build MoveIt from source.
# Used with wstool, users can download source of all packages of MoveIt.
- git:
local-name: moveit_msgs
uri: https://gitee.com/wx_android/moveit_msgs.git
version: master
- git:
local-name: moveit_resources
uri: https://gitee.com/wx_android/moveit_resources.git
version: master
- git:
local-name: geometric_shapes
uri: https://gitee.com/wx_android/geometric_shapes.git
version: noetic-devel
- git:
local-name: srdfdom
uri: https://gitee.com/wx_android/srdfdom
version: noetic-devel
- git:
local-name: moveit
uri: https://gitee.com/wx_android/moveit2.git
version: master
- git:
local-name: rviz_visual_tools
uri: https://gitee.com/wx_android/rviz_visual_tools
version: master
- git:
local-name: moveit_visual_tools
uri: https://gitee.com/wx_android/moveit_visual_tools.git
version: master
- git:
local-name: moveit_tutorials
uri: https://gitee.com/wx_android/moveit_tutorials.git
version: master
- git:
local-name: panda_moveit_config
uri: https://gitee.com/wx_android/panda_moveit_config.git
version: noetic-devel1.3 返回ws_moveit,继续输入wstool update -t src及之后内容。
问题2:
命令rosdep install -y --from-paths src --ignore-src --rosdistro ${ROS_DISTRO}遇到缺失依赖,例如下
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
moveit_tutorials: Cannot locate rosdep definition for [joy]
moveit_servo: Cannot locate rosdep definition for [spacenav_node]解决2:缺失的使用如下命令一个一个下(依赖名_使用-代替,前面加ros-melodic,其他ros版本对应切换),直到该步骤成功编译
sudo apt-get install ros-melodic-spacenav-node问题3:编译好的ompl-1.6.0文件夹放到ws_moveit/src之后,编译不会全成功,除了丢失了两个包,还会failed一些,如下图
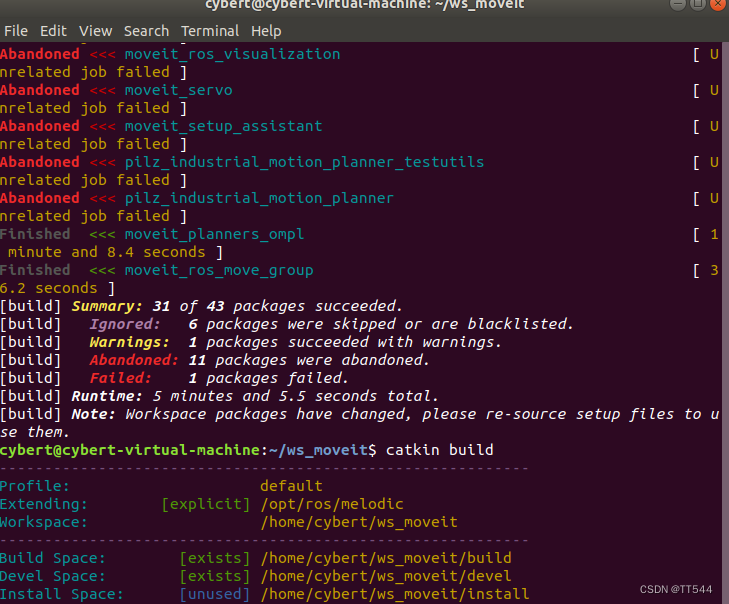
解决3:如图继续catkin build ,连着多build几次,如果faild的变少,则继续直到成功(我连着build了4次),如果还是不行,一直faild,catkin clean 之后再catkin build。
问题4:环境变量出错
echo "source /home/melodic/ws_moveit/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc请注意看!!!
echo "source /home/melodic/ws_moveit/devel/setup.bash" >> ~/.bashrc
这句中添加的是你ws_moveit路径,melodic应该替换成你的计算机用户名,例如:
echo "source /home/cybert/ws_moveit/devel/setup.bash" >> ~/.bashrc
如果这一步环境变量弄错了,启动rviz就不会有MotionPlanning工具包。
源码安装moveit之后,推荐将自己的项目重新再catkin build一下,更新一下rviz的moveit路径配置
最后参考安装推荐博文
Melodic版本Moveit和OMPL的源码安装,并自定义规划算法在Moveit上使用_源码安装moveit-CSDN博客
解决问题1博文:
下载movit报错:ERROR in config: Unable to download URL [https://raw.githubusercontent.com/r-CSDN博客















 693
693











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









