






通常,如果将无人水面艇视为刚体,动态模型可以分为两部分:运动学,处理运动的几何方面;动力学,分析导致运动的力。
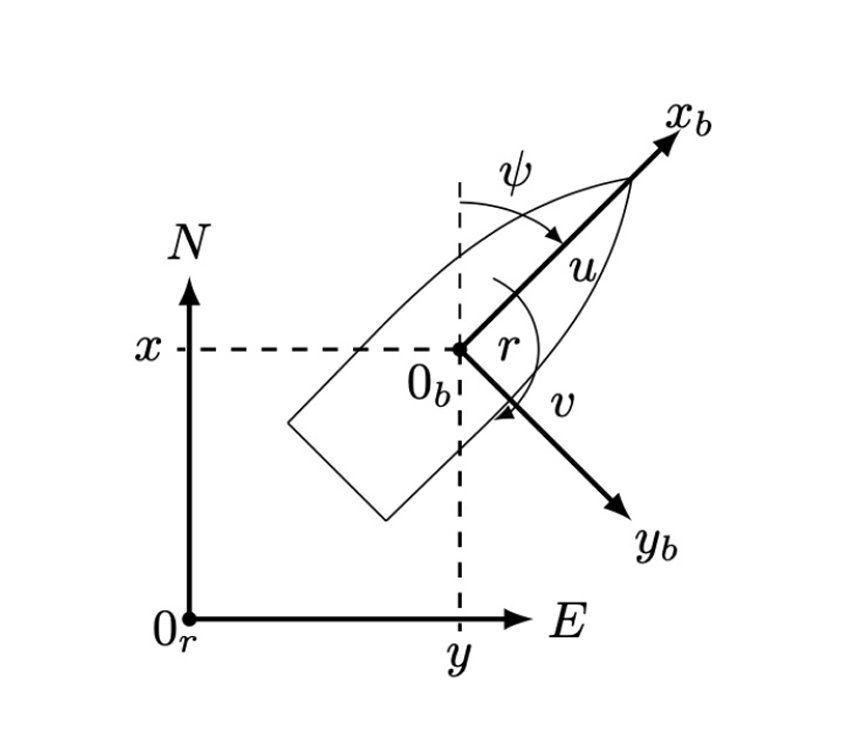
1. 运动学:相对于选定的坐标系(对于低速航行器,该坐标系通常是固定于地球的),海洋航行器在空间中会经历六自由度的运动。这些自由度在平移运动中被称为纵荡、横荡和垂荡,在旋转运动中被称为俯仰、横滚和偏航。对于水面航行器,特别是在处理执行器效应时,横滚、俯仰和垂荡的影响可以忽略不计,航行器模型可以简化为如图所示的仅具有三个自由度的平面运动。
运动学方程(速度到位置和姿态的变化)
1. 位置变化率(惯性坐标系):
2. 姿态角变化率:
2.动力学:
刚体在流体介质中的最终动力学方程为:
![]()
其中,![]() .
.![]()
从提供的MATLAB代码中,我们可以提取出自主水下航行器(AUV)的运动学方程和动力学方程如下:
动力学方程(力的平衡导致加速度)
1. Surge方向(纵向):
2. Sway方向(横向):
3. Yaw方向(偏航角加速度):
参数说明:
: 包含质量和附加质量的惯性参数。
: 线性阻尼系数。
: 非线性阻尼系数。
: 重力,
: 浮力。
: 重心和浮心的垂向位置。
: 纵向推力,
: 水平舵角,
: 垂直舵角。
---
上述方程完整描述了AUV的动力学和运动学行为,可用于数值仿真(如代码中的龙格-库塔法)。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









