







部分算法
ICP : ICP(Iterative Closest Point)细化是一种点云配准算法,用于将两个或多个点云数据集对齐,以便进行后续的三维重建、拓扑分析等操作。在ICP细化中,通过迭代计算最小化两个点云之间的距离,来优化一个点云到另一个点云的转换矩阵(旋转矩阵和平移向量)。通过反复迭代,ICP细化算法可以逐步地将两个点云对齐,使它们的误差越来越小,最终达到一个较好的配准效果。ICP细化算法常用于三维重建、医学图像处理、机器人视觉、自动驾驶等领域。
RANSAC : RANSAC是RANdom SAmple Consensus(随机抽样一致) 的缩写。它可以从一组包含局外点的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。
RANSAC的基本假设是:
(1)数据由局内点组成,例如:数据的分布可以用一些模型参数来解释;
(2)局外点是不能适应该模型的数据;
(3)除此之外的数据属于噪声。

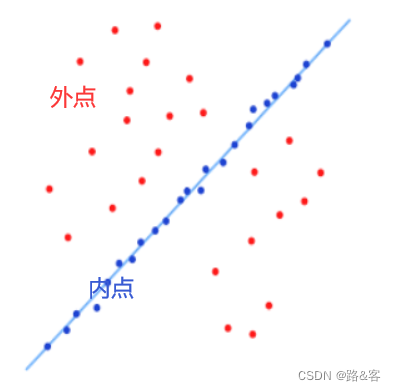
举个例子这是从一组数据中找出合适的2维直线。假设数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线。简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。
算法过程:
1.首先我们先随机假设一小组局内点为初始值。然后用此局内点拟合一个模型,此模型适应于假设的局内点,所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点,将局内点扩充。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后用所有假设的局内点去重新估计模型,因为此模型仅仅是在初始的假设的局内点估计的,后续有扩充后,需要更新。
5.最后,通过估计局内点与模型的错误率来评估模型。
整个这个过程为迭代一次,此过程被重复执行固定的次数,每次产生的模型有两个结局:
1、要么因为局内点太少,还不如上一次的模型,而被舍弃,
2、要么因为比现有的模型更好而被选用。
优点与缺点
RANSAC的优点是它能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数;RANSAC的缺点是它计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。RANSAC的另一个缺点是它要求设置跟问题相关的阀值。 RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
SAC-IA :采样一致性初始配准算法(Sample Consensus Initial Aligment , SAC-IA) 此算法依赖于点特征直方图,所以在执行此算法之前,应该先计算点云的FPFH,算法的大致思路如下:
(1) 从待配准点云P中选取n个采样点,为了尽量保证所采样的点具有不同的FPFH特征,采样点两两之间的距离应满足大于预先给定最小距离阈值d。
(2) 在目标点云Q中查找与点云P中采样点具有相似FPFH特征的一个或多个点,从这些相似点中随机选取一个点作为点云P在目标点云Q中的一一对应点。
(3) 计算对应点之间刚体变换矩阵, 然后通过求解对应点变换后的“距离误差和”函数来判断当前配准变换的性能。此处的距离误差和函数多使用Huber罚函数表示。
PFH : 点特征的描述子一般是基于点坐标、法向量、曲率来描述某个点周围的几何特征。用点特征描述子不能提供特征之间的关系,减少了全局特征信息。因此诞生了一直基于直方图的特征描述子:PFH–point feature histogram(点特征直方图)。 PFH是基于点与其邻近之间的关系以及它们的估计法线,也即是它考虑估计法线之间的相互关系,来描述几何特征。
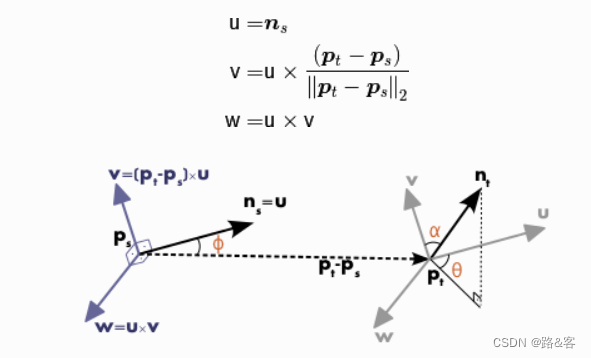
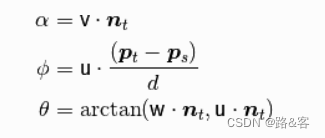
使用上图的uvw坐标系,法线ns,nt之间的偏差可以用一组角度表示:
首先计算查询点Pq近邻内的对应的所有四个元素,如图所示,表示的是一个查询点Pq)的PFH计算的影响区域,Pq 用红色标注并放在圆球的中间位置,半径为r, Pq的所有k邻元素即与点Pq的距离小于半径r的所有点)全部互相连接在一个网络中。最终的PFH描述子通过计算邻域内所有两点之间关系而得到的直方图,因此存在一个O(N^2) 的计算复杂性。
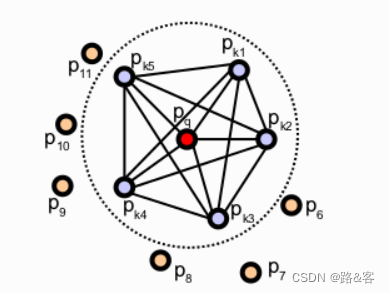
为了创建最终的直方图,将所有四元素组以统计的方式放入一个直方图中,这个过程首先把每个特征值范围划分为b个子区间,并统计落在每个子区间的点数量,前三个元素均是角度,都和法向量有关系,可以将三个元素标准化并放到同一个区间内。
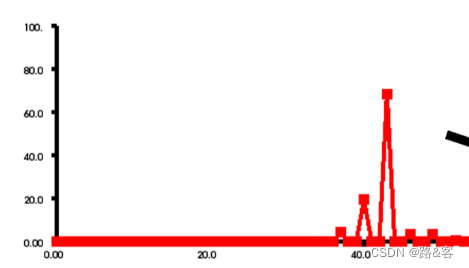
横坐标表示角度,纵坐标表示区间内点云的数量。
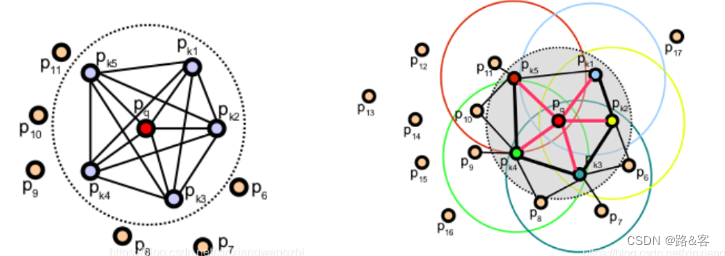
FPFH : 不同于PFH是计算邻域点所有组合的特征元素,而这一步只计算查询点和近邻点之间的特征元素。如下图,第一个图是PFH计算特征过程,即邻域点所有组合的特征值(图中所有连线,包括但不限于Pq和Pk之间的连线),第二个图是FPFH中计算内容,只需要计算Pq(查询点)和紧邻点(图2中红线部分)之间的特征元素。
SHOT : Signature of Histogram of Orientation,描述子的构建一般分为两个过程特征编码(Signature) 和直方图统计(Histogram),特征编码是关键,直方图是表述特征的分布情况,增强特征的鲁棒性(概率的角度)。
Signature:类似于2D图像的特征描述子,对特征点附近的信息进行编码,图像是圆形或矩形Patch中的灰度、梯度变化信息。相似的,点云特征描述子就是对点领域附近的几何信息和颜色、纹理信息进行编码;几何信息主要有K-近邻点(或者support)的法线方向、夹角、曲率等;
Histogram:有了K-邻域内(支撑区域)点的一系列特征描述子,采用对每个子区域进行特征统计的思路,可以构建出整个支撑区域的直方图特征。
















 2253
2253











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









