






 本文详细记录了在ARM设备上安装PaddleLitePythonAPI的过程,包括环境准备、源码编译和解决遇到的问题,如修改文件格式,确保Python和pip的版本正确。编译完成后,通过pip安装生成的.whl文件。
本文详细记录了在ARM设备上安装PaddleLitePythonAPI的过程,包括环境准备、源码编译和解决遇到的问题,如修改文件格式,确保Python和pip的版本正确。编译完成后,通过pip安装生成的.whl文件。
安装paddlelite python的api过程中出现问题,记录安装问题和步骤
paddlelite简介
Paddle Lite - 端侧轻量化推理引擎
面向端侧场景的轻量化推理引擎Paddle Lite,可以实现飞桨模型在x86/ARM平台下多种OS内的高效部署,同时支持在10种以上的GPU/NPU异构后端上进行推理加速和混合调度;通过Paddle Lite,您在不同端侧场景下的模型部署需求都可以被完美支持。
官方文档飞桨PaddlePaddle-源于产业实践的开源深度学习平台
安装方式
1预编译
通过下载官方预编译包直接使用,缺点预编译包只有c++的api,安装方式参考官方文档不过多赘述
Paddle Lite 预编译库下载-PaddlePaddle深度学习平台
2源码包编译
准备编译环境¶
适用于基于 ARMv8 和 ARMv7 架构 CPU 的各种开发板,例如 RK3399,树莓派等,目前支持交叉编译和本地编译两种方式,对于交叉编译方式,在完成目标程序编译后,可通过 scp 方式将程序拷贝到开发板运行。 因为本教程使用 Host 环境为 ARM 架构,因此下面仅介绍本地编译 ARM Linux 方式。
本地编译ARM Linux¶
-
gcc、g++、git、make、wget、python、pip、python-dev、patchelf
-
cmake(建议使用 3.10 或以上版本)
环境安装命令¶
以 Ubuntu 为例介绍安装命令。其它 Linux 发行版安装步骤类似,在此不再赘述。 注意需要 root 用户权限执行如下命令。
# 1. Install basic software apt update apt-get install -y --no-install-recommends \ gcc g++ make wget python unzip patchelf python-dev # 2. install cmake 3.10 or above wget https://www.cmake.org/files/v3.10/cmake-3.10.3.tar.gz tar -zxvf cmake-3.10.3.tar.gz cd cmake-3.10.3 ./configure make sudo make install
编译步骤¶
# 下载 Paddle Lite 源码并切换到发布分支,如 develop (下载太慢可以在win下使用git clone命令下载传输到板卡上) git clone https://github.com/PaddlePaddle/Paddle-Lite.git cd Paddle-Lite && git checkout develop # (可选) 删除 third-party 目录,编译脚本会自动从国内 CDN 下载第三方库文件 # rm -rf third-party
编译过程问题记录及解决方法
chmod +x ./lite/tools/build_linux.sh
#安装脚本执行时会用到oython,pip;python版本在3.0以上,系统有就忽略
python
#查看python命令python的版本如果不是3.0以上就需要安装python3.0以上版本重新建立软连接
sudo apt-get install python3.6 # (安装python)
ln -s /usr/bin/python3 /usr/bin/python #(建立软连接)
sudo apt-get install python3-pip #(安装pip3)
ln -s /usr/bin/pip3 /usr/bin/pip #(建立软连接)
#如果需要python,添加参数--with_python=ON --with_cv=ON 详细参数说明参考
ARM Linux 环境下编译适用于 ARM Linux 的库-PaddlePaddle深度学习平台
./lite/tools/build_linux.sh --with_python=ON --with_cv=ON
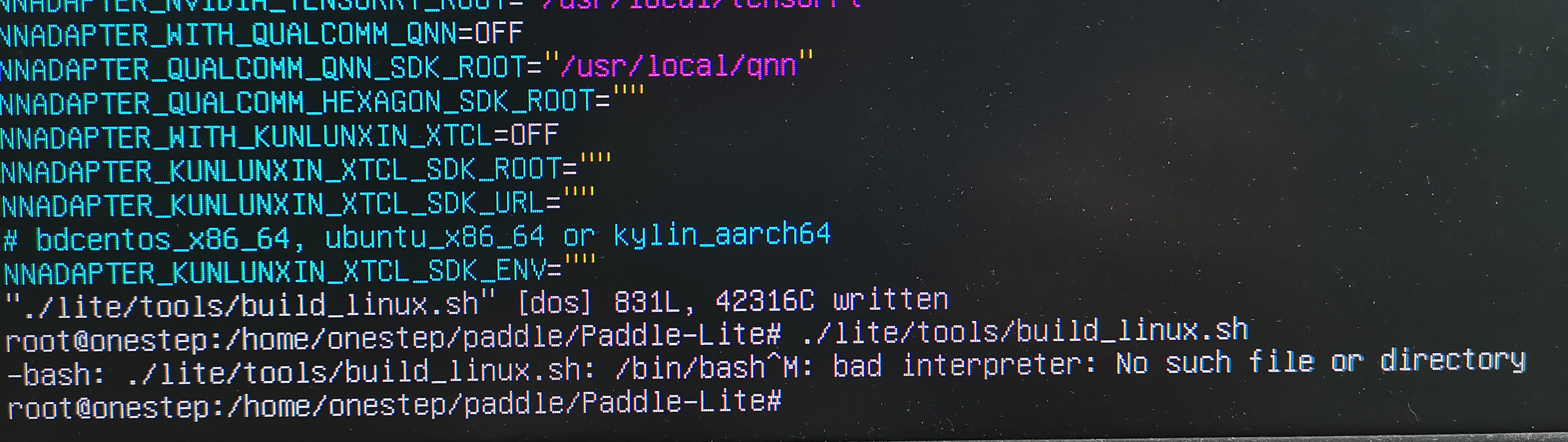
vim ./lite/tools/build_linux.sh
:set ff #底部是否显示fileformat=dos
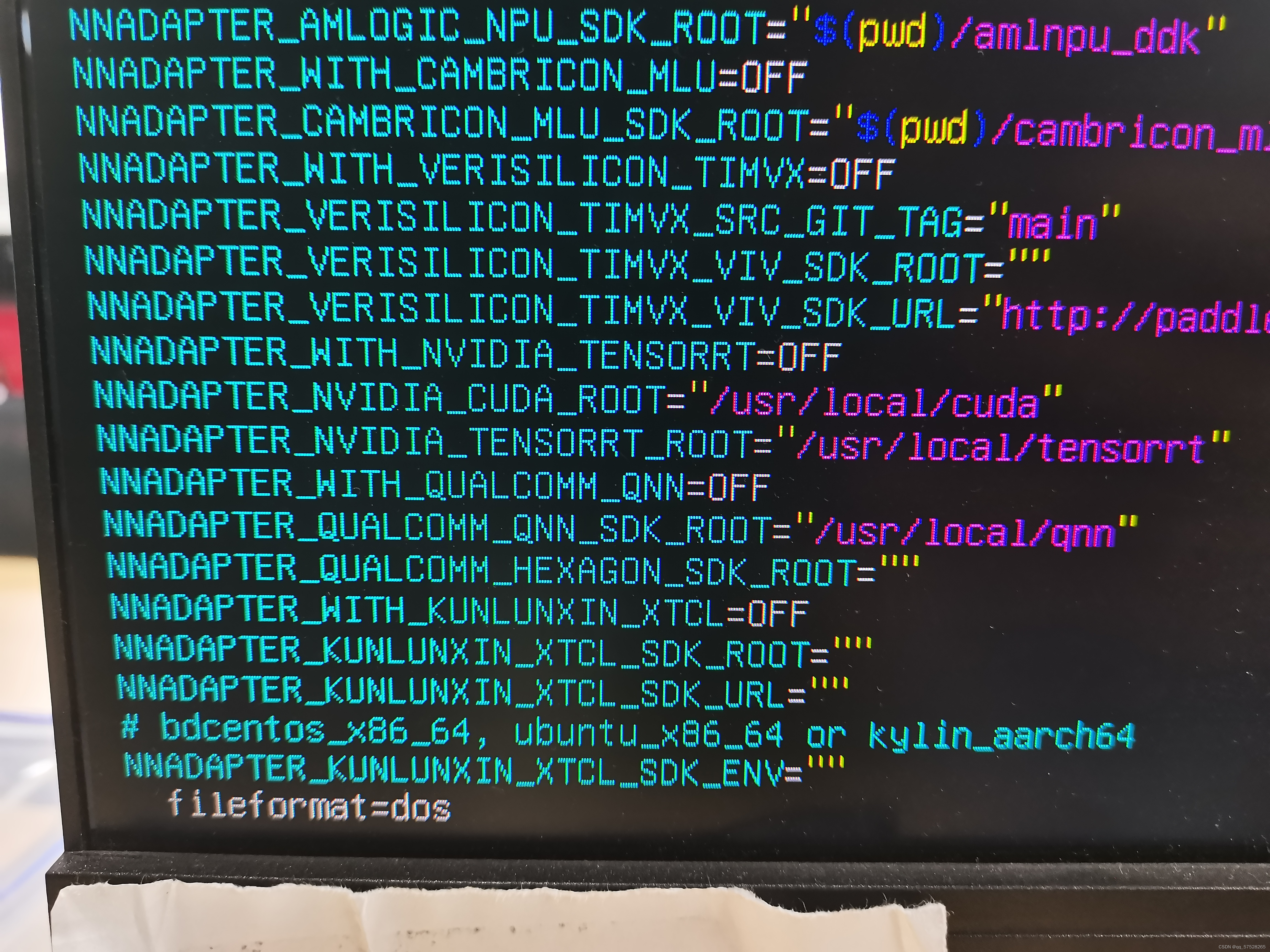
原因windows采用的是\n\r换行,ubuntu采用的是\n换行
解决办法
:set ff=unix
:wq #保存退出
重新运行
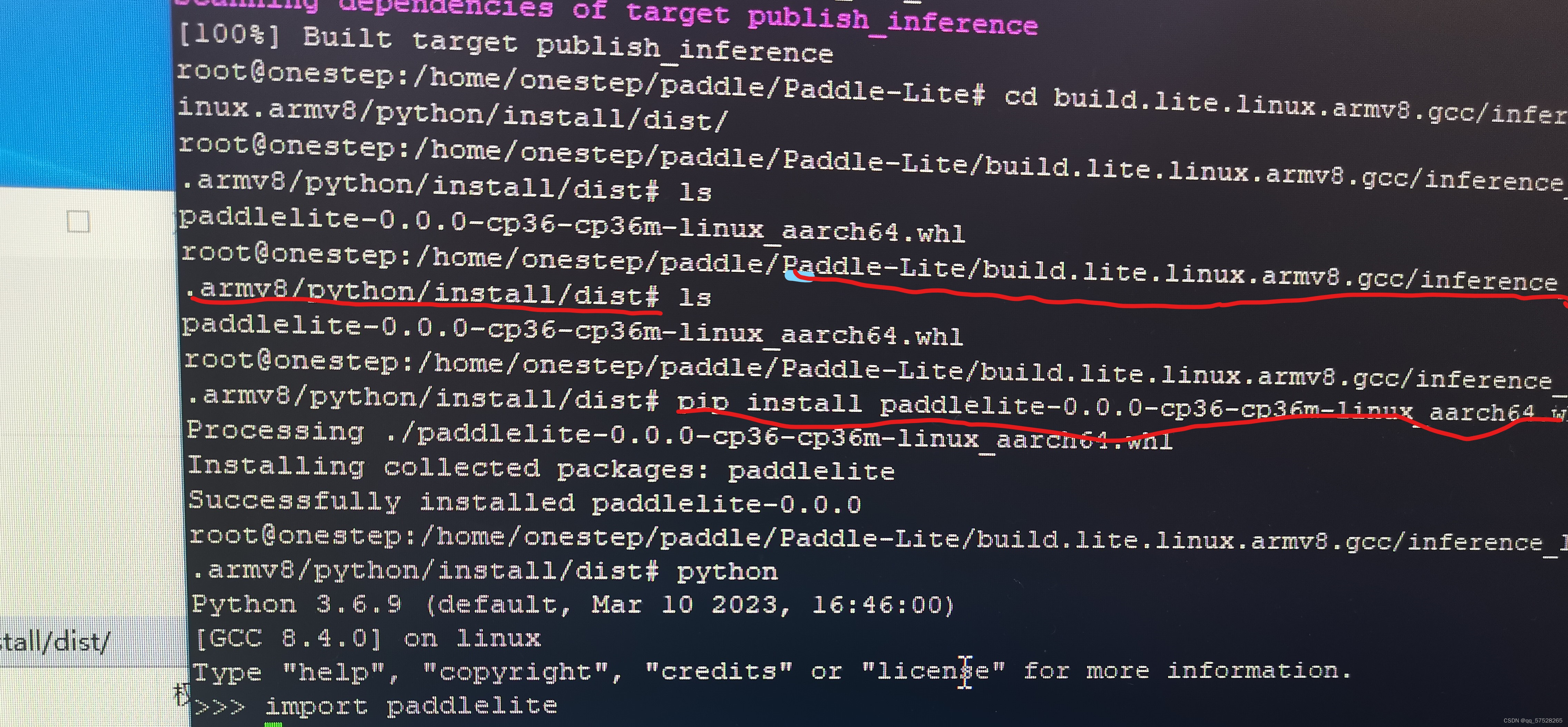
./lite/tools/build_linux.sh --with_python=ON --with_cv=ON(时间有点久)
编译完成后在图纸上路径下有.whl文件,pipinstall 文件名

















 1111
1111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









