






1.标定算法使用 multi_LIDAR_calibration 具体功能模块见上篇博客
具体根据雷达型号适配工作,源代码是根据 两个16线雷达完成的标定工作
我需要将其中一个适配为32线的雷达,只需要根据 ch32线雷达的间隔角调整一下,
并在launch文件里,修改一下,G0使用16线 G6使用32线就可以了
目前需要做一个标定工具包:
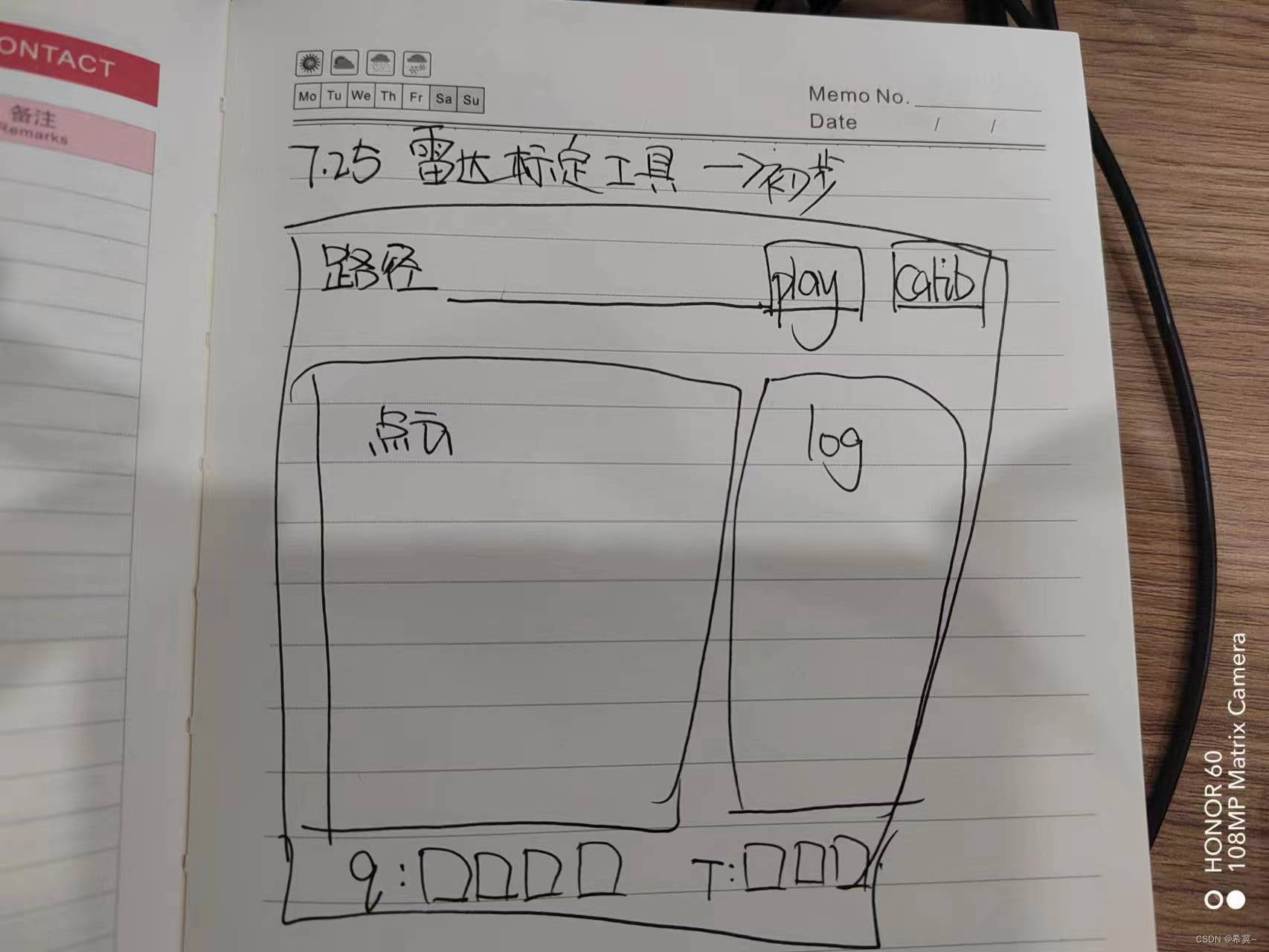
要求所有的功能都在ui界面连接,
目前完成进度: 雷达点云可视化功能,外参矩阵可显示
需要添加两个按键功能
play 播放路径下的bag包
calib 启动标定程序
需要注意一个小问题 on_button_calib_clicked() 我的按钮名为 button_calib
这种情况下会自动连接,我没注意这个小细节,又手动connect了一下,结果每次启动launch就报错,因为这相当于连接了两次,注册了重复节点!!!
6-26 基本可以实现播包,开始标定这些功能
又需要增加新的功能 播bag包需要将话题重映射一下,需要实现
选中某bag包,可以看到其里边的话题,将话题填进框内即可完成 映射为G0或G6
点云显示那块也不能有手动勾选的内容了,需要自定义为想要的话题,直接显示就可以了
这应该是比较不好搞的地方,暂时没有思路
7-3
ui界面大体功能基本完成
1.connect
2.点击calib启动标定程序
3.选择bag包,会显示bag里边的话题,选中话题右键转化为想要的话题名称
4.play 播放bag包
开始迭代-----------------
尚未完成的功能为
1. log view输出迭代过程
2. 得到外参矩阵发送到界面里
3. ui界面关闭后,并没有关闭 calibration 和 play,他们都在后台继续运行,不符合我的预期
最终结果如图

启用该工具是以muti_LIDAR_calibration标定为基础的,我在原有的代码里添加了地面滤除和一些和ui界面进行交互的话题,想尝试使用ui工具首先需要将我的muti_LIDAR_calibration代码编译通过
双激光雷达标定工具操作手册
1. 创建cmd终端并打开roscore
2. 打开标定软件,点击App->Connect, 出现 Connect Succeed! 表示连接成功
3. 激光雷达配置初始参数设置,在param.yaml文件中
3.1设置base雷达到distribution雷达初始变换位姿参数
3.2 雷达标定最小点云数量map_match_min_num
3.3 ICP匹配成功时的最大ICP匹配得分 max_icp_fittness_score
3.4 结果保存路径 savepath(需要根据自己的路径进行设置)
4. 选择雷达型号,适配lslidar_c16和lslidar_ch32,默认设置如下:
base雷达:lslidar_ch32 topic_name:/G6/velodyne_points destribute雷达:lslidar_c16 topic_name:/G0/velodyne_points
- 点击 Calib 开启标定程序,会出现一个终端运行程序
- 点击 open 选择存放目录下的rosbag文件,同时rosbag里的话题会显示在 Remap List 中 ,通过选择所需要的话题进行重映射
base雷达话题映射为 /G6/velodyne_points destribute雷达话题映射为 /G0/velodyne_points
7. 话题完成映射后,点击 playBag 播放rosbag包,当界面出现 save result时标定完成
8. 结果保存在3.4设置好的路径下
源码地址:https://github.com/ORBslam2-3/calib_gui.git















 989
989











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









