







1.步进电动机有三线式、五线式、六线式三种,但其控制方式均相同,必须以脉冲电流来驱动。若每旋转一圈以20个励磁信号来计算,则每个励磁信号前进18度,其旋转角度与脉冲数成正比,正、反转可由脉冲顺序来控制。
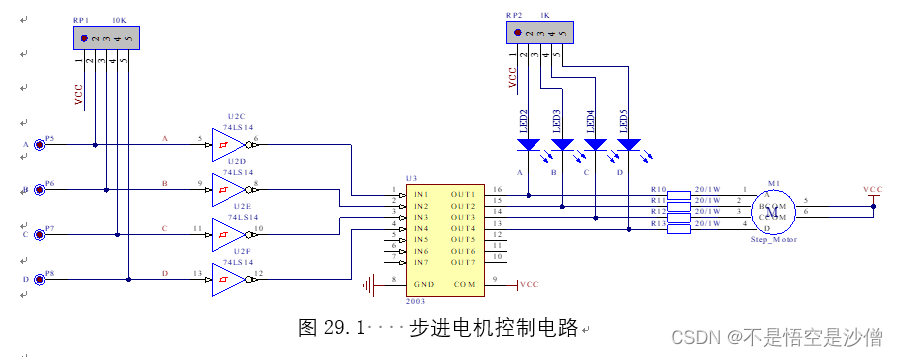
2.步进电动机的励磁方式可分为全部励磁及半步励磁,其中全步励磁又有1相励磁及2相励磁之分,而半步励磁又称1-2相励磁。图为步进电动机的控制等效电路,适应控制A、B、/A、/B的励磁信号,即可控制步进电动机的转动。每输出一个脉冲信号,步进电动机只走一步。因此,依序不断送出脉冲信号,即可步进电动机连续转动。
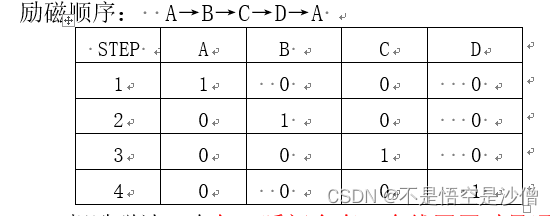
a.1相励磁法:在每一瞬间只有一个线圈导通。消耗电力小,精确度良好,但转矩小,振动较大,每送一励磁信号可走18度。若欲以1相励磁法控制步进电动机正转,其励磁顺序如图所示。若励磁信号反向传送,则步进电动机反转。
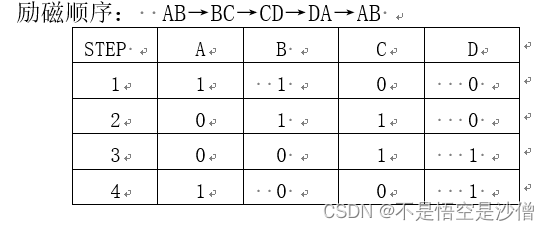
b.2相励磁法:在每一瞬间会有二个线圈同时导通。因其转矩大,振动小,故为目前使用最多的励磁方式,每送一励磁信号可走18度。若以2相励磁法控制步进电动机正转,其励磁顺序如图所示。若励磁信号反向传送,则步进电动机反转。
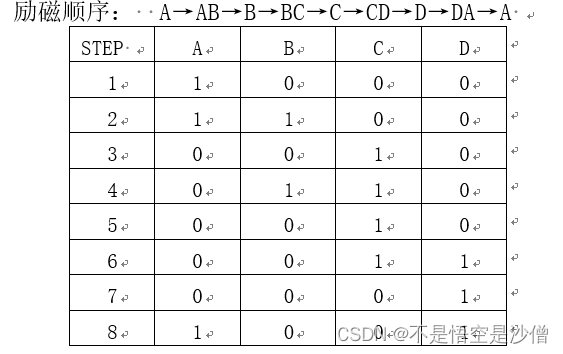
c.1-2相励磁法:为1相与2相轮流交替导通。因分辨率提高,且运转平滑,每送一励磁信号可走9度,故亦广泛被采用。若以1相励磁法控制步进电动机正转,其励磁顺序如图所示。若励磁信号反向传送,则步进电动机反转。
3.步进电机的负载转矩与速度成反比,速度愈快负载转矩愈小,当速度快至其极限时,步进电动机即不再运转。所以在每走一步后,程序必须延时一段时间。
步进电机的转速与施加到驱动器上的脉冲信号频率成正 比例关系。
实验电路图
unsigned int step[4]={0X01,0X02,0X04,0X08};//A→B→C→D→A
unsigned int step_1[4]={0X03,0X06,0X0C,0X09};//AB→BC→CD→DA→AB
unsigned int step_2[8]={0X01,0X03,0X02,0X06,0X04,0X0C,0X08,0X09};// A→AB→B→BC→C→CD→D→DA→A 对应数组

















 8984
8984











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











