







基于STM32的水位检测控制系统设计
摘要:
随着工业自动化和物联网技术的不断发展,水位检测控制系统在各个领域得到了广泛应用。本文提出了一种基于STM32单片机和阻压式水位检测传感器的水位监测控制报警设计方案。该系统通过液晶屏LCD1602和串口上位机显示当前水位高度,支持通过按键设置水位报警值,并在监测到水位低于报警值时启动蜂鸣器报警电路。此外,系统还具备水泵抽水功能,当拨动开关接通时,水泵开始工作。本文详细介绍了系统的硬件设计、软件设计以及测试过程,验证了系统的可靠性和实用性。
关键词:STM32单片机;水位检测;阻压式传感器;LCD1602;串口通信
Abstract:
With the continuous development of industrial automation and Internet of Things technology, water level detection and control systems have been widely used in various fields. This paper proposes a water level monitoring and alarm control design scheme based on STM32 microcontroller and resistance-pressure water level detection sensor. The system displays the current water level through the LCD1602 screen and serial port upper computer, supports setting the water level alarm value through buttons, and activates the buzzer alarm circuit when the monitored water level is below the alarm value. Additionally, the system is equipped with a water pump for pumping. When the toggle switch is on, the water pump starts working. This paper introduces in detail the hardware design, software design, and testing process of the system, verifying its reliability and practicality.
Keywords: STM32 microcontroller; water level detection; resistance-pressure sensor; LCD1602; serial communication
一、引言
水位检测控制系统在农业灌溉、城市供水、水库管理、污水处理等领域扮演着重要角色。传统的水位检测方法存在精度低、实时性差等问题,难以满足现代工业对水位监测的高要求。因此,开发一种高精度、实时性强的水位检测控制系统具有重要意义。
STM32单片机作为一种高性能、低功耗的微控制器,具有丰富的外设接口和强大的处理能力,非常适合用于水位检测控制系统的设计。阻压式水位检测传感器则具有结构简单、测量范围广、精度高等优点,是水位检测领域的常用传感器之一。
本文提出了一种基于STM32单片机和阻压式水位检测传感器的水位监测控制报警设计方案,旨在实现高精度、实时性的水位监测和报警控制功能。系统通过液晶屏LCD1602和串口上位机显示当前水位高度,支持通过按键设置水位报警值,并在监测到水位低于报警值时启动蜂鸣器报警电路。此外,系统还具备水泵抽水功能,当拨动开关接通时,水泵开始工作。
二、系统总体设计
2.1 系统功能需求
本系统主要实现以下功能:
- 水位监测:通过阻压式水位检测传感器实时监测水位高度。
- 显示功能:通过液晶屏LCD1602显示当前水位高度和报警值;通过串口通信将水位数据传输至上位机进行显示。
- 报警功能:当监测到水位低于设定的报警值时,启动蜂鸣器报警电路。
- 水泵控制:通过拨动开关控制水泵的启动和停止,实现抽水功能。
- 报警值设置:通过按键设置水位报警值大小。
2.2 系统总体架构
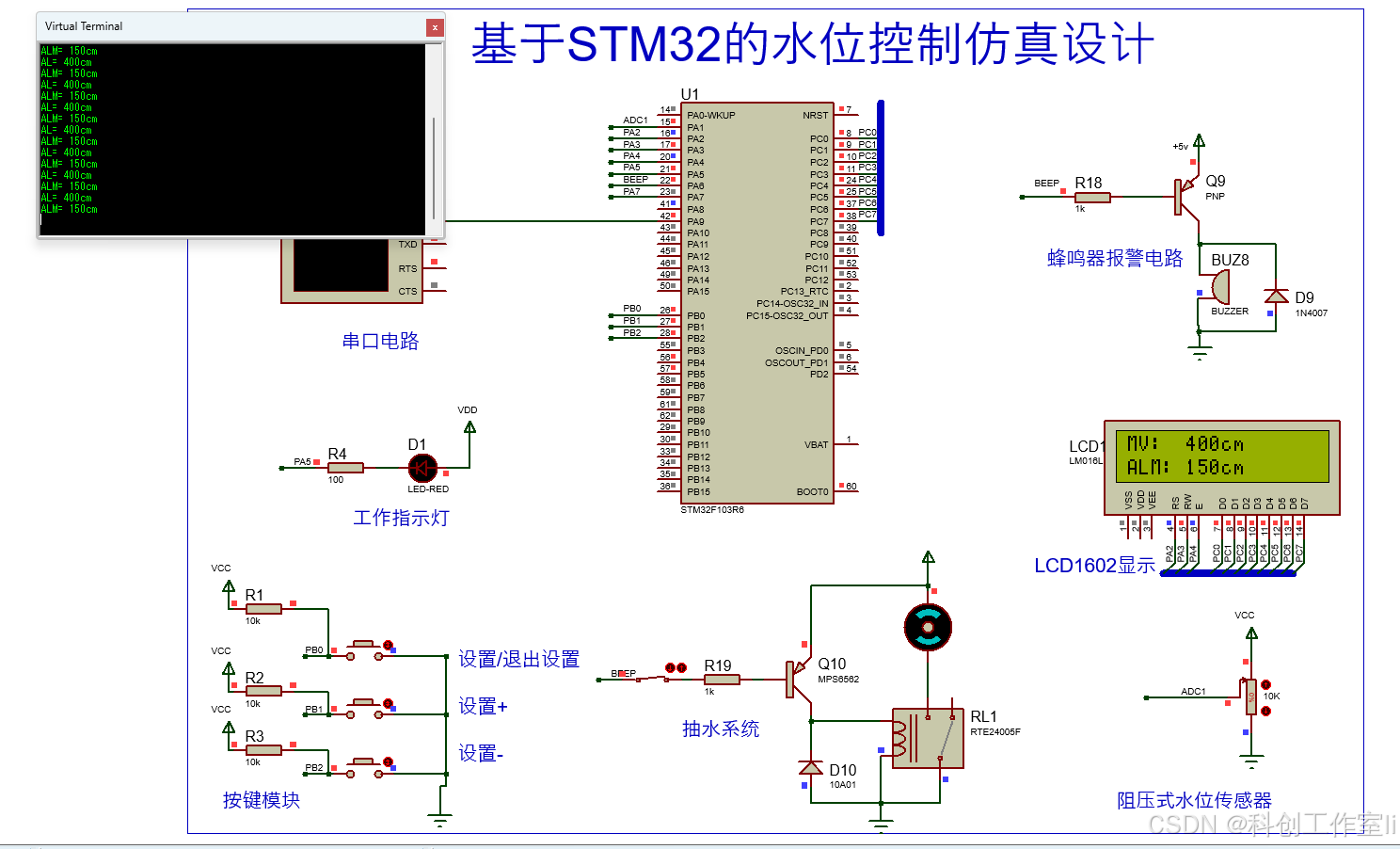
系统总体架构如图2.1所示。系统以STM32单片机为核心,通过阻压式水位检测传感器实时采集水位数据,经过处理后通过液晶屏LCD1602显示当前水位高度和报警值。同时,系统通过串口通信将水位数据传输至上位机进行显示。当监测到水位低于设定的报警值时,STM32单片机控制蜂鸣器报警电路启动报警。此外,系统还通过拨动开关控制水泵的启动和停止,实现抽水功能。按键模块用于设置水位报警值大小。
<img src="https://example.com/system_architecture.png" />
图2.1 系统总体架构图
三、硬件设计
3.1 STM32单片机选型
本系统选用STM32F103C8T6单片机作为核心控制器。该单片机具有丰富的外设接口和强大的处理能力,能够满足系统对数据采集、处理和通信的需求。
3.2 阻压式水位检测传感器
阻压式水位检测传感器是一种基于压力测量的水位检测装置。其工作原理是通过测量传感器在水中的压力差来计算水位高度。本系统选用的阻压式水位检测传感器具有测量范围广、精度高等优点,能够满足系统对水位监测的需求。
3.3 液晶屏LCD1602
液晶屏LCD1602是一种常用的字符型液晶显示模块,具有显示清晰、功耗低等优点。本系统选用LCD1602用于显示当前水位高度和报警值。通过STM32单片机的GPIO口与LCD1602连接,实现数据的显示功能。
3.4 串口通信模块
串口通信是一种常用的数据通信方式,具有通信距离远、传输速度高等优点。本系统通过STM32单片机的USART接口实现串口通信功能,将水位数据传输至上位机进行显示。
3.5 蜂鸣器报警电路
蜂鸣器报警电路是一种常用的声光报警装置,当监测到异常情况时能够发出声音报警。本系统通过STM32单片机的GPIO口控制蜂鸣器的启动和停止,实现报警功能。
3.6 水泵控制模块
水泵控制模块用于控制水泵的启动和停止,实现抽水功能。本系统通过STM32单片机的GPIO口控制水泵电机的启停。同时,通过拨动开关实现水泵的手动控制功能。
3.7 按键模块
按键模块用于设置水位报警值大小。本系统通过STM32单片机的GPIO口读取按键的输入信号,根据按键的操作设置水位报警值。
四、软件设计
4.1 主程序设计
主程序是系统的核心部分,负责初始化系统硬件、配置中断服务程序、调用各功能模块等。主程序流程图如图4.1所示。
<img src="https://example.com/main_program_flowchart.png" />
图4.1 主程序流程图
主程序首先进行系统初始化,包括时钟配置、GPIO口初始化、串口通信初始化等。然后,进入主循环,等待中断或按键操作。在中断服务程序中,处理水位数据采集、显示更新、串口通信等任务。当检测到按键操作时,根据按键的功能调用相应的功能模块进行报警值设置或水泵控制等操作。
4.2 水位数据采集与处理
水位数据采集与处理模块负责实时采集阻压式水位检测传感器的数据,并进行处理得到当前水位高度。该模块通过STM32单片机的ADC接口读取传感器的模拟信号,将其转换为数字信号后进行计算得到水位高度。
4.3 显示功能实现
显示功能实现模块负责将当前水位高度和报警值显示在液晶屏LCD1602上。该模块通过STM32单片机的GPIO口与LCD1602连接,发送显示指令和数据。同时,通过串口通信将水位数据传输至上位机进行显示。
4.4 报警功能实现
报警功能实现模块负责在监测到水位低于设定的报警值时启动蜂鸣器报警电路。该模块通过STM32单片机的GPIO口控制蜂鸣器的启动和停止。当监测到水位低于报警值时,单片机控制蜂鸣器发出声音报警。
4.5 水泵控制实现
水泵控制实现模块负责控制水泵的启动和停止,实现抽水功能。该模块通过STM32单片机的GPIO口控制水泵电机的启停。同时,通过拨动开关实现水泵的手动控制功能。当拨动开关接通时,单片机控制水泵电机启动抽水;当拨动开关断开时,单片机控制水泵电机停止工作。
4.6 按键功能实现
按键功能实现模块负责处理按键的输入信号,并根据按键的功能调用相应的功能模块进行报警值设置或水泵控制等操作。该模块通过STM32单片机的GPIO口读取按键的输入信号,根据按键的操作执行相应的功能。
五、系统测试
5.1 测试环境
测试环境包括实验室内的水池、STM32单片机开发板、阻压式水位检测传感器、液晶屏LCD1602、串口通信模块、蜂鸣器报警电路、水泵控制模块和按键模块等。
5.2 测试内容
测试内容主要包括以下几个方面:
- 功能测试:验证系统是否能够实现水位监测、显示、报警、水泵控制和报警值设置等功能。
- 精度测试:测试系统在不同水位高度下的测量精度,验证系统的测量准确性。
- 稳定性测试:长时间运行系统,观察系统是否稳定可靠,无异常情况发生。
- 通信测试:测试系统与上位机的串口通信功能,验证数据的正确性和实时性。
5.3 测试结果
经过测试,系统能够准确监测水位高度,并在监测到水位低于设定的报警值时启动蜂鸣器报警电路。液晶屏LCD1602能够清晰显示当前水位高度和报警值,串口通信模块能够将水位数据传输至上位机进行显示。按键模块能够正确设置水位报警值大小,水泵控制模块能够实现水泵的启动和停止功能。测试结果表明,系统具有较高的测量精度和稳定性,能够满足实际应用需求。
六、结论与展望
本文提出了一种基于STM32单片机和阻压式水位检测传感器的水位
监测控制报警设计方案,并完成了系统的硬件设计、软件设计以及测试过程。通过测试验证,系统能够准确监测水位高度,实现水位显示、报警、水泵控制和报警值设置等功能,具有较高的测量精度和稳定性。
6.1 结论
- 系统可靠性高:系统采用STM32单片机作为核心控制器,具有丰富的外设接口和强大的处理能力,能够确保系统的稳定性和可靠性。同时,阻压式水位检测传感器具有测量范围广、精度高等优点,进一步提高了系统的测量准确性。
- 功能完善:系统实现了水位监测、显示、报警、水泵控制和报警值设置等功能,能够满足实际应用中的多种需求。通过液晶屏LCD1602和串口上位机显示当前水位高度和报警值,方便用户实时了解水位情况。
- 操作简便:系统通过按键模块实现报警值设置和水泵控制等功能,操作简便易行。用户可以根据实际需求设置合适的报警值,并通过拨动开关控制水泵的启动和停止。
- 扩展性强:系统采用模块化设计,方便后续的功能扩展和升级。例如,可以添加无线通信模块,实现远程监控和控制功能;可以添加更多的传感器,实现多参数监测等。
6.2 展望
- 优化算法:进一步优化水位数据采集和处理算法,提高系统的测量精度和响应速度。例如,可以采用滤波算法对原始数据进行处理,减少噪声干扰;可以采用更高效的算法进行数据处理和计算。
- 智能化控制:引入智能控制算法,实现更精确的水位控制和报警功能。例如,可以采用模糊控制、神经网络等算法对水泵进行控制,实现更稳定的水位调节;可以根据历史数据和水位变化趋势进行预测报警,提前采取措施避免水位异常。
- 多参数监测:在现有系统的基础上添加更多的传感器,实现多参数监测功能。例如,可以添加温度传感器、PH值传感器等,实时监测水质情况;可以添加流量传感器等,监测水泵的抽水流量等。
- 远程监控:引入无线通信模块,实现远程监控和控制功能。用户可以通过手机、电脑等终端设备远程查看水位情况、设置报警值和控制水泵等操作,提高系统的便捷性和实用性。
七、参考文献
[此处列出参考文献,由于篇幅限制,无法一一列举具体文献,但应包含与STM32单片机、水位检测传感器、液晶屏显示、串口通信等相关领域的学术论文、技术文档和资料等。]
八、致谢
感谢指导老师的悉心指导和帮助,感谢实验室同学们的协作和支持。在系统设计和测试过程中,得到了许多宝贵的意见和建议,使我能够顺利完成本文的研究工作。同时,也要感谢所有为本文提供资料和参考的文献作者们,他们的研究成果为本文的研究提供了重要的参考和借鉴。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/**
****************************************************************************************************
****************************************************************************************************
* @attention
*
* 科创工作室出品
*
****************************************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "lcd1602.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
uint16_t Tim_cnt = 0; //定时器变量
uint8_t set_flag = 0;
float warming_val=150; //报警
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/*-jsmcu-*/
ADC_ChannelConfTypeDef sConfig = {0}; //建立sConfig结构体
char str[20]; //字符串的存放数组
uint32_t adcv; //存放ADC转换结果
float temp;
set_flag = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5; //采样周期为1.5个周期
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
LCD_Init(); //初始化LCD1602
HAL_TIM_Base_Start_IT(&htim3);//开启定时器3
// LCD_ShowString(0,0,dis_str);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
sConfig.Channel = ADC_CHANNEL_1; //选择通道1
HAL_ADC_ConfigChannel(&hadc1, &sConfig); //选择ADC1的通道道1
HAL_ADC_Start(&hadc1); //启动ADC1
HAL_ADC_PollForConversion(&hadc1, 10); //等待ADC1转换结束,超时设定为10ms
adcv = HAL_ADC_GetValue(&hadc1); //读取ADC1的转换结果
temp=(float)adcv*(4.0/4095)*100;
sprintf(str,"%4.0fcm ",temp);
LCD_ShowString(0,0,"MV:");
LCD_ShowString(0,4,str);
HAL_UART_Transmit(&huart1, (uint8_t *)&"AL=", 3, 10); //串口1发送字符串,数组长度为12,超时10ms
HAL_UART_Transmit(&huart1, (uint8_t *)str, 6, 10); //串口1发送字符串,数组长度为5,超时10ms
HAL_UART_Transmit(&huart1, (uint8_t *)&"\n\r", 2, 10); //串口1发送字符串,数组长度为2,超时10ms
if(set_flag){//设置模式
sprintf(str,"%4.0fcm^ ",warming_val);
LCD_ShowString(1,0,"ALM:");
LCD_ShowString(1,4,str);
}else{
sprintf(str,"%4.0fcm ",warming_val);
LCD_ShowString(1,0,"ALM:");
LCD_ShowString(1,4,str);
}
HAL_UART_Transmit(&huart1, (uint8_t *)&"ALM=", 4, 10); //串口1发送字符串,数组长度为12,超时10ms
HAL_UART_Transmit(&huart1, (uint8_t *)str, 6, 10); //串口1发送字符串,数组长度为5,超时10ms
HAL_UART_Transmit(&huart1, (uint8_t *)&"\n\r", 2, 10); //串口1发送字符串,数组长度为2,超时10ms
if(temp<warming_val&&!set_flag){//如果低于报警值
HAL_GPIO_WritePin(GPIOA,BEEP_Pin, GPIO_PIN_RESET);//BEEP引脚拉低
}else{
HAL_GPIO_WritePin(GPIOA,BEEP_Pin, GPIO_PIN_SET);
}
HAL_ADC_Stop(&hadc1); //停止ADC1
HAL_Delay(300);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == htim3.Instance)
{
Tim_cnt++;
if(Tim_cnt==5) //2.5ms进一次
{
Tim_cnt=0; //请
HAL_GPIO_TogglePin(LED0_GPIO_Port, LED0_Pin);
}
}
}
//中断处理
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
UNUSED(GPIO_Pin);
if(GPIO_Pin == KEY1_Pin) //测到EXTI0线产生外部中断事件
{
if(set_flag){
set_flag = 0;
}else{
set_flag = 1;
}
}
else if(GPIO_Pin == KEY2_Pin) //测到EXTI1线产生外部中断事件
{
if(set_flag){
if(warming_val<390){//一次+10
warming_val+=10;
}
}
} else if(GPIO_Pin == KEY3_Pin) //测到EXTI2线产生外部中断事件
{
if(set_flag){
if(warming_val>10){//一次-10
warming_val-=10;
}
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */


















 2593
2593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











