







使用两个接收天线接收信号,通过两个天线接收到的相位差信息,对信号的来向进行定位。
所测得两信号之间的相位差与信号源发出信号到达接收天线A、B的路程差有关,若需要求出(俩天线在某一位置,绕两天线的中心旋转)旋转角度与相位差的关系,需要先求得,信号源到达两天线的时间差也即路程差。
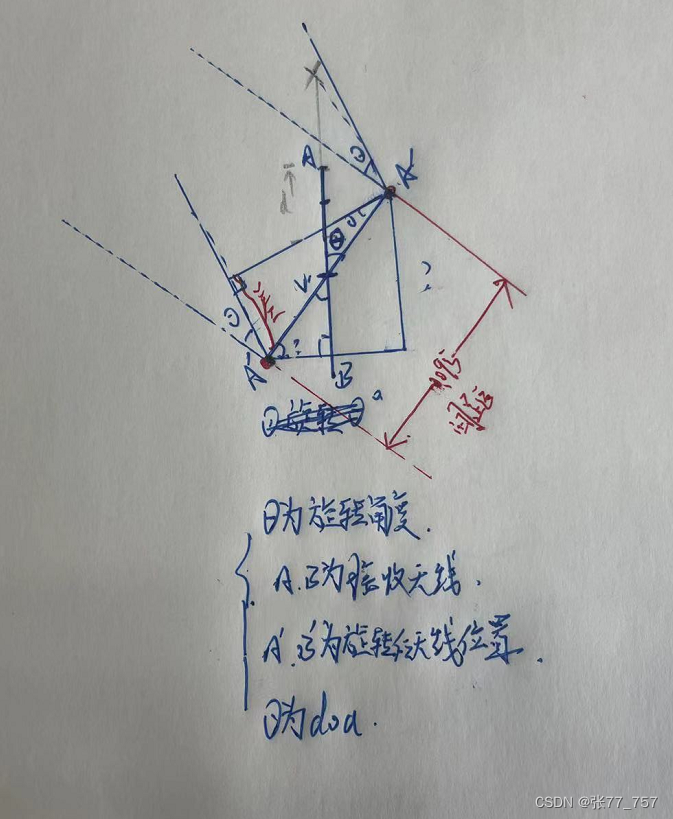
假设天线的间距为d,波达角为x°
1.sin(x) × 间距 = 路程差
2.路程差 / 最大路程差 * 最大路程差对应的相位差 = 在波达角为x°时的相位差
波达角又和旋转角度有关,两者是线性关系,与最初的波达角以及顺时针逆时针旋转有关,实验中最初波达角为90°,逆时针旋转:
旋转角度:0°→90°→180°→270°→360°(0°)
波达角度:90°→0°→-90°→0°→90°
通过上面两个角度,可以得出所对应的线性关系如下:
在maltab中表示:
%%
%旋转角度与对应的doa以及对应的相位差
for i = 1 : FileNo*2
result(i)=90-angle_DJ(i);
if result(i) < -90
result(i) = (-result(i))-180; %为根据方位角算出的真实doa
end
end
% figure(&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 728
728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









