






(一)C程序的内存分配
1、栈区(stack)
由编译器自动分配释放,存放函数的参数值,局部变量的值等。其操作方式类似于数据结构中的栈。
2、堆区(heap)
一般由程序员分配释放,若程序员不释放,程序结束时可能由OS回收 。它与数据结构中的堆不同,分配方式类似于链表。
3、全局区(静态区)(static)
全局变量和静态变量的存储是放在一块的,初始化的全局变量和静态变量在一块区域, 未初始化的全局变量、未初始化的静态变量在相邻的另一块区域。当程序结束后,变量由系统释放 。
4、文字常量区
存放常量字符串。当程序结束后,常量字符串由系统释放 。
5、程序代码区
存放函数体的二进制代码。
(二)Ubuntu和STM32下对C程序输出信息进行验证
在虚拟机中打开Ubuntu,然后自定义路径,在终端中输入如下命令:
gedit test.c
该命令为新建一个test.c文件
#include <stdio.h>
#include <stdlib.h>
//定义全局变量
int init_global_a = 1;
int uninit_global_a;
static int inits_global_b = 2;
static int uninits_global_b;
void output(int a)
{
printf("hello");
printf("%d",a);
printf("\n");
}
int main( )
{
//定义局部变量
int a=2;
static int inits_local_c=2, uninits_local_c;
int init_local_d = 1;
output(a);
char *p;
char str[10] = "lyy";
//定义常量字符串
char *var1 = "1234567890";
char *var2 = "qwertyuiop";
//动态分配
int *p1=malloc(4);
int *p2=malloc(4);
//释放
free(p1);
free(p2);
printf("栈区-变量地址\n");
printf(" a:%p\n", &a);
printf(" init_local_d:%p\n", &init_local_d);
printf(" p:%p\n", &p);
printf(" str:%p\n", str);
printf("\n堆区-动态申请地址\n");
printf(" %p\n", p1);
printf(" %p\n", p2);
printf("\n全局区-全局变量和静态变量\n");
printf("\n.bss段\n");
printf("全局外部无初值 uninit_global_a:%p\n", &uninit_global_a);
printf("静态外部无初值 uninits_global_b:%p\n", &uninits_global_b);
printf("静态内部无初值 uninits_local_c:%p\n", &uninits_local_c);
printf("\n.data段\n");
printf("全局外部有初值 init_global_a:%p\n", &init_global_a);
printf("静态外部有初值 inits_global_b:%p\n", &inits_global_b);
printf("静态内部有初值 inits_local_c:%p\n", &inits_local_c);
printf("\n文字常量区\n");
printf("文字常量地址 :%p\n",var1);
printf("文字常量地址 :%p\n",var2);
printf("\n代码区\n");
printf("程序区地址 :%p\n",&main);
printf("函数地址 :%p\n",&output);
return 0;
}
然后使用命令:
gcc test.c进行编译
输入ls可以看到有一个绿色的a.out可执行文件。
输入./a.out命令进行执行
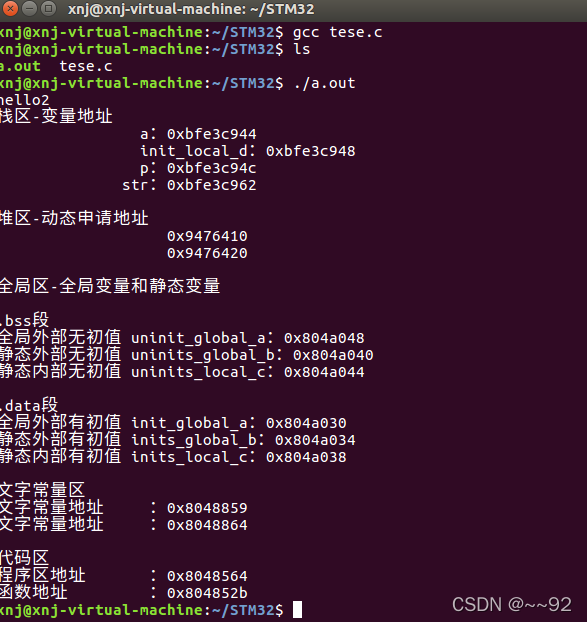
如图可以看到栈区的变量地址和堆区的变量地址。
可以看到栈区的地址和堆区的地址就是逐渐变大。
(三)stm32开发板上验证
这里我使用的是之前的keil工程代码
参考 上一篇.
修改代码
ustart.c:
#include "usart.h"
//使UASRT串口可用printf函数发送
//在usart.h文件里可更换使用printf函数的串口号
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE {
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x){
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f){
while((USART_n->SR&0X40)==0);//循环发送,直到发送完毕
USART_n->DR = (u8) ch;
return ch;
}
#endif
void _ttywrch(int ch)
{
ch = ch;
}
/*
USART1串口相关程序
*/
#if EN_USART1 //USART1使用与屏蔽选择
u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART1_RX_STA=0; //接收状态标记
/*
USART1专用的printf函数
当同时开启2个以上串口时,printf函数只能用于其中之一,其他串口要自创独立的printf函数
调用方法:USART1_printf("123"); //向USART2发送字符123
*/
//void USART1_printf (char *fmt, ...){
// char buffer[USART1_REC_LEN+1]; // 数据长度
// u8 i = 0;
// va_list arg_ptr;
// va_start(arg_ptr, fmt);
// vsnprintf(buffer, USART1_REC_LEN+1, fmt, arg_ptr);
// while ((i < USART1_REC_LEN) && (i < strlen(buffer))){
// USART_SendData(USART1, (u8) buffer[i++]);
// while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
// }
// va_end(arg_ptr);
//}
void USART1_Init(u32 bound){ //串口1初始化并启动
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启ENABLE/关闭DISABLE中断接收到数据时中断 读寄存器DR清零,也可软件手动清零
USART_Cmd(USART1, ENABLE); //使能串口
}
void USART1_IRQHandler(void){ //串口1中断服务程序(固定的函数名不能修改)
u8 Res;
//以下是字符串接收到USART1_RX_BUF[]的程序,(USART1_RX_STA&0x3FFF)是数据的长度(不包括回车)
//当(USART1_RX_STA&0xC000)为真时表示数据接收完成,即超级终端里按下回车键。
//在主函数里写判断if(USART1_RX_STA&0xC000),然后读USART1_RX_BUF[]数组,读到0x0d 0x0a即是结束。
//注意在主函数处理完串口数据后,要将USART1_RX_STA清0
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET){ //接收中断(接收到的数据必须是0x0d 0x0a结尾)
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
printf("%c",Res); //把收到的数据以 a符号变量 发送回电脑
if((USART1_RX_STA&0x8000)==0){//接收未完成
if(USART1_RX_STA&0x4000){//接收到了0x0d
if(Res!=0x0a)USART1_RX_STA=0;//接收错误,重新开始
else USART1_RX_STA|=0x8000; //接收完成了
}else{ //还没收到0X0D
if(Res==0x0d)USART1_RX_STA|=0x4000;
else{
USART1_RX_BUF[USART1_RX_STA&0X3FFF]=Res ; //将收到的数据放入数组
USART1_RX_STA++; //数据长度计数加1
if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
#endif
/*
USART2串口相关程序
*/
#if EN_USART2 //USART2使用与屏蔽选择
u8 USART2_RX_BUF[USART2_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART2_RX_STA=0; //接收状态标记
/*
USART2专用的printf函数
当同时开启2个以上串口时,printf函数只能用于其中之一,其他串口要自创独立的printf函数
调用方法:USART2_printf("123"); //向USART2发送字符123
*/
void USART2_printf (char *fmt, ...){
char buffer[USART2_REC_LEN+1]; // 数据长度
u8 i = 0;
va_list arg_ptr;
va_start(arg_ptr, fmt);
vsnprintf(buffer, USART2_REC_LEN+1, fmt, arg_ptr);
while ((i < USART2_REC_LEN) && (i < strlen(buffer))){
USART_SendData(USART2, (u8) buffer[i++]);
while (USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
}
va_end(arg_ptr);
}
void USART2_Init(u32 bound){ //串口1初始化并启动
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能UART2所在GPIOA的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //使能串口的RCC时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //设置USART2的RX接口是PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //设置USART2的TX接口是PA2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART2 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启ENABLE/关闭DISABLE中断
USART_Cmd(USART2, ENABLE); //使能串口
//Usart2 NVIC 配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}
void USART2_IRQHandler(void){ //串口2中断服务程序(固定的函数名不能修改)
u8 Res;
//以下是字符串接收到USART2_RX_BUF[]的程序,(USART2_RX_STA&0x3FFF)是数据的长度(不包括回车)
//当(USART2_RX_STA&0xC000)为真时表示数据接收完成,即超级终端里按下回车键。
//在主函数里写判断if(USART2_RX_STA&0xC000),然后读USART2_RX_BUF[]数组,读到0x0d 0x0a即是结束。
//注意在主函数处理完串口数据后,要将USART2_RX_STA清0
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){ //接收中断(接收到的数据必须是0x0d 0x0a结尾)
Res =USART_ReceiveData(USART2);//(USART1->DR); //读取接收到的数据
printf("%c",Res); //把收到的数据以 a符号变量 发送回电脑
if((USART2_RX_STA&0x8000)==0){//接收未完成
if(USART2_RX_STA&0x4000){//接收到了0x0d
if(Res!=0x0a)USART2_RX_STA=0;//接收错误,重新开始
else USART2_RX_STA|=0x8000; //接收完成了
}else{ //还没收到0X0D
if(Res==0x0d)USART2_RX_STA|=0x4000;
else{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=Res ; //将收到的数据放入数组
USART2_RX_STA++; //数据长度计数加1
if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
#endif
#if EN_USART3 //如果使能了接收
u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART3_RX_STA=0; //接收状态标记
/*
USART3专用的printf函数
当同时开启2个以上串口时,printf函数只能用于其中之一,其他串口要自创独立的printf函数
调用方法:USART3_printf("123"); //向USART3发送字符123
*/
void USART3_printf (char *fmt, ...){
char buffer[USART3_REC_LEN+1]; // 数据长度
u8 i = 0;
va_list arg_ptr;
va_start(arg_ptr, fmt);
vsnprintf(buffer, USART3_REC_LEN+1, fmt, arg_ptr);
while ((i < USART3_REC_LEN) && (i < strlen(buffer))){
USART_SendData(USART3, (u8) buffer[i++]);
while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET);
}
va_end(arg_ptr);
}
void USART3_Init(u32 BaudRate){ //USART3初始化并启动
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); //使能UART3所在GPIOB的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); //使能串口的RCC时钟
//串口使用的GPIO口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//设置USART3的RX接口是PB11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//接口模式 浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//设置USART3的TX接口是PB10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//输出速度50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//接口模式 复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
//配置串口
USART_InitStructure.USART_BaudRate = BaudRate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure);//配置串口3
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//使能串口接收中断
//USART_ITConfig(USART3, USART_IT_TXE, ENABLE);//串口发送中断在发送数据时开启
USART_Cmd(USART3, ENABLE);//使能串口3
//串口中断配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;//允许USART3中断
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//中断等级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
//串口3中断服务程序(固定的函数名不能修改)
//调用方法:if(USART3_RX_STA&0xC000){ 加入数据处理程序 }//标志位是0xC000表示收到数据串完成。
void USART3_IRQHandler(void){
u8 Res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET){ //接收中断
Res =USART_ReceiveData(USART3);//读取接收到的数据
if(Res=='S'){//判断数据是否是STOP(省略读取S)
USART3_RX_STA=1;//如果是STOP则标志位为1
}else if(Res=='K'){//判断数据是否是OK(省略读取K)
USART3_RX_STA=2;//如果是OK则标志位为2
}
}
}
#endif
/*********************************************************************************************
* 杜洋工作室 www.DoYoung.net
* 洋桃电子 www.DoYoung.net/YT
*********************************************************************************************/
/*
a符号的作用:
%d 十进制有符号整数
%u 十进制无符号整数
%f 浮点数
%s 字符串
%c 单个字符
%p 指针的值
%e 指数形式的浮点数
%x, %X 无符号以十六进制表示的整数
%o 无符号以八进制表示的整数
%g 自动选择合适的表示法
%p 输出地址符
*/
usart.h:
#ifndef __USART_H
#define __USART_H
//#include <stdarg.h>
//#include <stdlib.h>
#include <string.h>
#include "stdio.h"
#include "sys.h"
#define USART_n USART1 //定义使用printf函数的串口,其他串口要使用USART_printf专用函数发送
#define USART1_REC_LEN 200 //定义USART1最大接收字节数
#define USART2_REC_LEN 200 //定义USART2最大接收字节数
#define USART3_REC_LEN 200 //定义USART3最大接收字节数
//不使用某个串口时要禁止此串口,以减少编译量
#define EN_USART1 1 //使能(1)/禁止(0)串口1
#define EN_USART2 0 //使能(1)/禁止(0)串口2
#define EN_USART3 0 //使能(1)/禁止(0)串口3
extern u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u8 USART2_RX_BUF[USART2_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART1_RX_STA; //接收状态标记
extern u16 USART2_RX_STA; //接收状态标记
extern u16 USART3_RX_STA; //接收状态标记
//函数声明
void USART1_Init(u32 bound);//串口1初始化并启动
void USART2_Init(u32 bound);//串口2初始化并启动
void USART3_Init(u32 bound);//串口3初始化并启动
void USART1_printf(char* fmt,...); //串口1的专用printf函数
void USART2_printf(char* fmt,...); //串口2的专用printf函数
void USART3_printf(char* fmt,...); //串口3的专用printf函数
#endif
main.c:
#include "stm32f10x.h" //STM32头文件
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include <stdio.h>
#include <stdlib.h>
//定义全局变量
int init_global_a = 1;
int uninit_global_a;
static int inits_global_b = 2;
static int uninits_global_b;
void output(int a)
{
printf("hello");
printf("%d",a);
printf("\n");
}
int main (void){//主程序
u8 a=7,b=8;
//初始化程序
RCC_Configuration(); //时钟设置
USART1_Init(115200); //串口初始化(参数是波特率)
//主循环
while(1){
int a=2;
static int inits_local_c=2, uninits_local_c;
int init_local_d = 1;
output(a);
char *p;
char str[10] = "cleveryoga";
//定义常量字符串
char *var1 = "1234567890";
char *var2 = "abcdefghij";
//动态分配
int *p1=malloc(4);
int *p2=malloc(4);
//释放
free(p1);
free(p2);
printf("栈区-变量地址\n\r");
printf(" a:%p\n\r", &a);
printf(" init_local_d:%p\n\r", &init_local_d);
printf(" p:%p\n\r", &p);
printf(" str:%p\n\r", str);
printf("\n堆区-动态申请地址\n\r");
printf(" %p\n\r", p1);
printf(" %p\n\r", p2);
printf("\n全局区-全局变量和静态变量\n\r");
printf("\n.bss段\n");
printf("全局外部无初值 uninit_global_a:%p\n\r", &uninit_global_a);
printf("静态外部无初值 uninits_global_b:%p\n\r", &uninits_global_b);
printf("静态内部无初值 uninits_local_c:%p\n\r", &uninits_local_c);
printf("\n.data段\n\r");
printf("全局外部有初值 init_global_a:%p\n\r", &init_global_a);
printf("静态外部有初值 inits_global_b:%p\n\r", &inits_global_b);
printf("静态内部有初值 inits_local_c:%p\n\r", &inits_local_c);
printf("\n文字常量区\n\r");
printf("文字常量地址 :%p\n\r",var1);
printf("文字常量地址 :%p\n\r",var2);
printf("\n代码区\n\r");
printf("程序区地址 :%p\n\r",&main);
printf("函数地址 :%p\n\r",&output);
delay_ms(1000); //延时
}
}
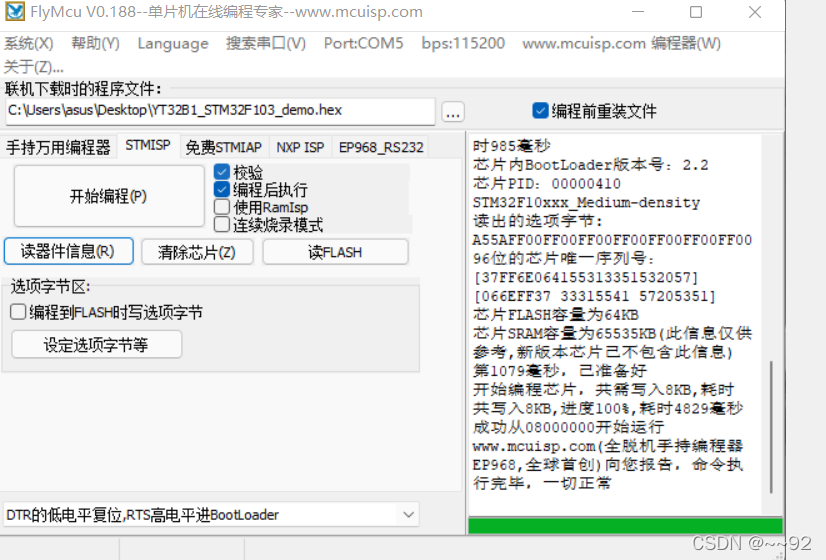
编译生成.hex
烧录
在串口助手打开得到如下结果
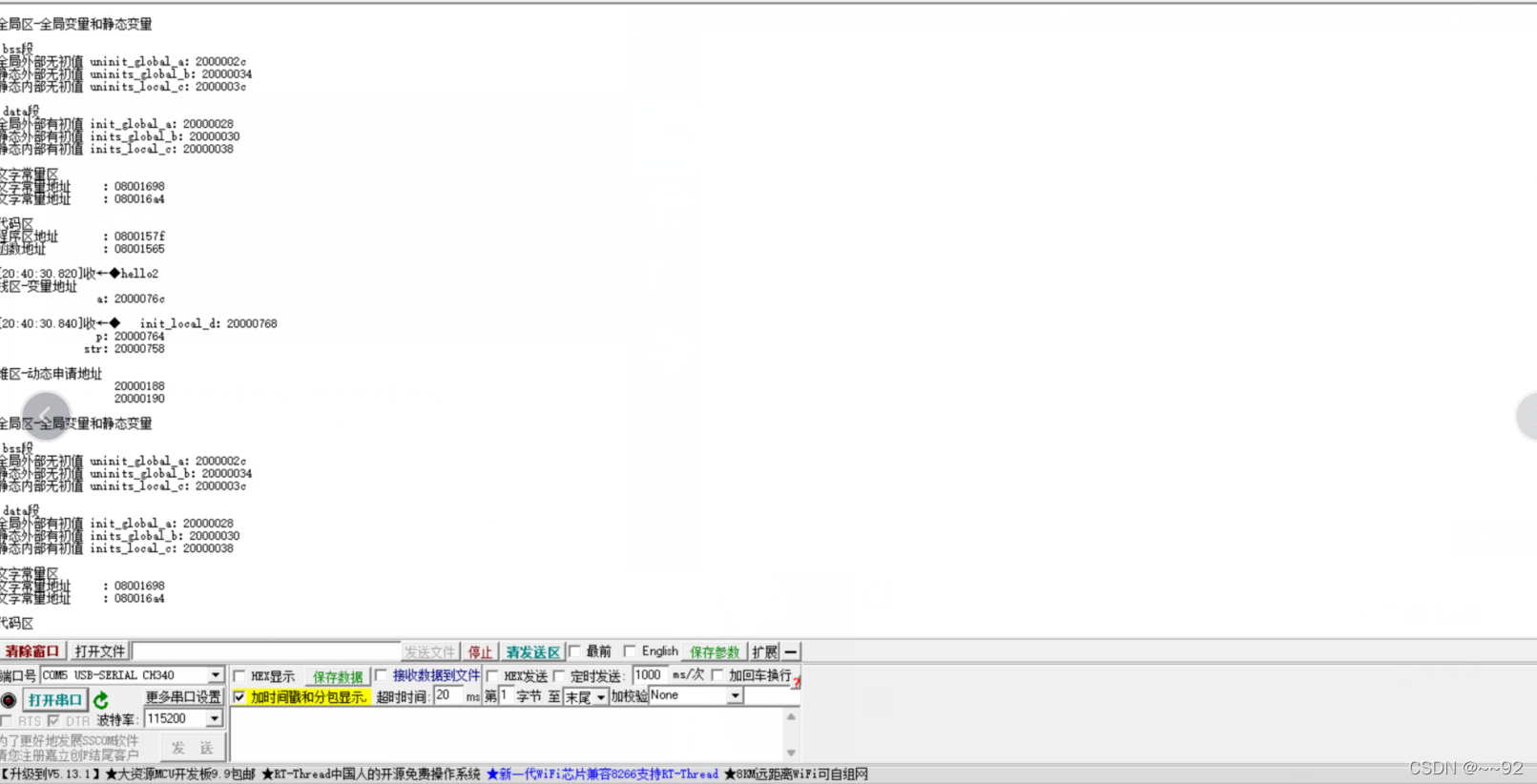
上图结果可以看出栈区变量地址和堆区变量地址是逐渐变小的,与Ubuntu中看的的结果相反。
这是因为STM32中的存储位置不同。
(四)stm32数据的存储位置
查看stm32地址的分配
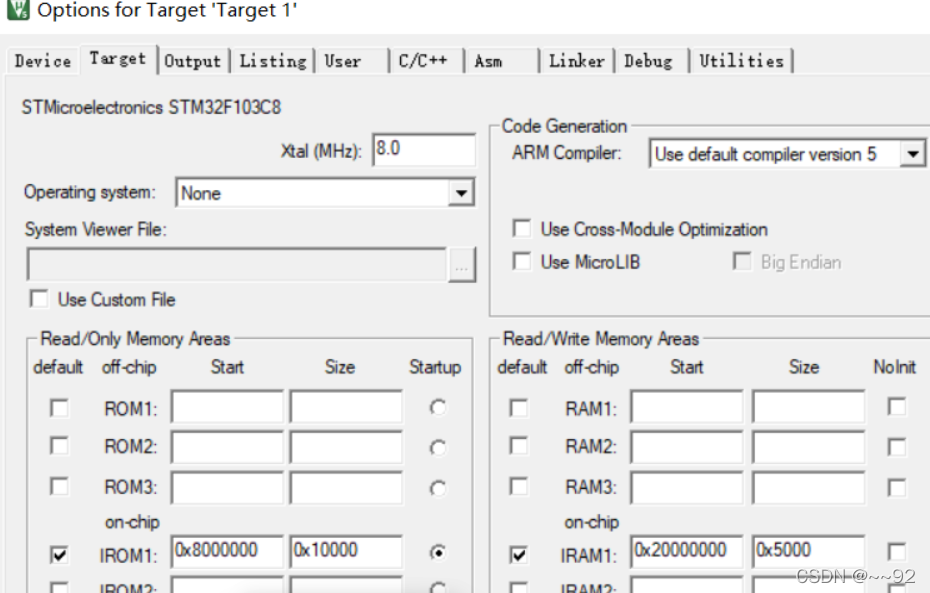
上图中可以看到IROM的起始位置是0x8000000,大小为010000,这个部分用于存放代码区和文字常量区。
IRAM的起始位置是0x20000000,大小是0x5000,这个区域用来存放栈、堆、全局区(.bss段、.data段)
(五)总结心得
对C程序的内存分配有进一步的认识,知道一个C程序内存应该包括哪些部分。其中,主要是程序段、数据段、堆栈三个部分。不同系统下面,区域内的地址值变化是不相同。
(六)参考链接
https://blog.csdn.net/qq_43279579/article/details/110308101
https://blog.csdn.net/liwei16611/article/details/88545248














 219
219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









