






目录
一、项目介绍
1.1简介
实验室遗留了一个雷达,该项目用来测试雷达是否有问题,能否正常使用以及在其他项目中使用该雷达。
1.2历程
-
在淘宝询问各卖该设备的商家是否有使用手册(都为二手贩子,都没有)。
-
登入该厂家官网企业介绍-深圳市镭神智能系统有限公司,寻找对应资料。联系在线客服获取雷达的输入电压以及SDK。
-
在中控中下载调试雷达。
1.3软硬件
雷达供电电压为24V,项目使用的软硬件型号如下
| 设备 | 型号 |
|---|---|
| 雷达设备 | 镭神智能N301-P |
| 中控型号 | Jeston Orin AGX |
二、项目实现的功能
-
获取雷达数据
-
可视化雷达数据
三、如何部署使用
在doc目录中有ZH_linux_and_win_demo_SDK_v2.2.0说明文档。
3.1官方说明
注:官方说明可能与雷达实际不一致,如果按官方说明测试失败请看3.2自测说明
3.1.1准备工作
-
通过网线把中控与雷达相连,并通过拔插网线并观察命令行中ifconfig的变换,确定有线连接设备名。
-
把ip地址改为192.168.1.102,子网掩码为255.255.255.0,代码如下,其中eth1为有线连接设备名。
ifconfig eth1 192.168.1.102 netmask 255.255.255.0 -
如果没有事先安装好pcl点云库,可输入以下命令安装
sudo apt-get install libpcl-dev
3.1.2编译和运行
-
切换到文件夹所在目录,并执行以下代码进行编译
cd build cmake .. make -j4
-
进入生成可执行文件目录中
cd ../bin
作用 命令 获取数据 demo ./demo 可视化 demo_viewer ./demo_viewer 可视化离线包 demo_viewer_Pcap ./demo_viewer_Pcap 注意:离线的文件要放到./demo/PcapPacketPath文件夹中并在源文件main_PCL_Pcap.cpp 中修改对应的文件名,修改离线包的名称
3.2自测说明
-
打开终端:ping 雷达 IP,测试硬件是否连接正常,若ping通则正常,否则检测硬件连接。
ping 192.168.1.222

-
使用tcpdump查看雷达发送数据包情况,如果显示雷达发送到目的端数据包为1206个字节,则表示雷达数据发送正常。(eth1为有线连接设备名)
sudo tcpdump -ni eth1
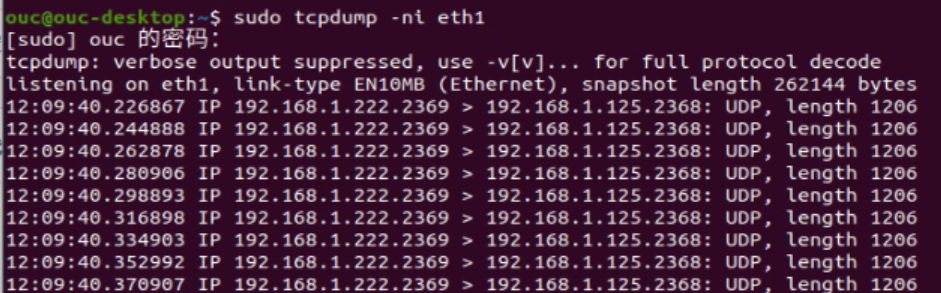
注:如果显示雷达发送到目的端数据包为28个字节,则为雷达数据传不到中控,原因可能为
-
网线连接问题
-
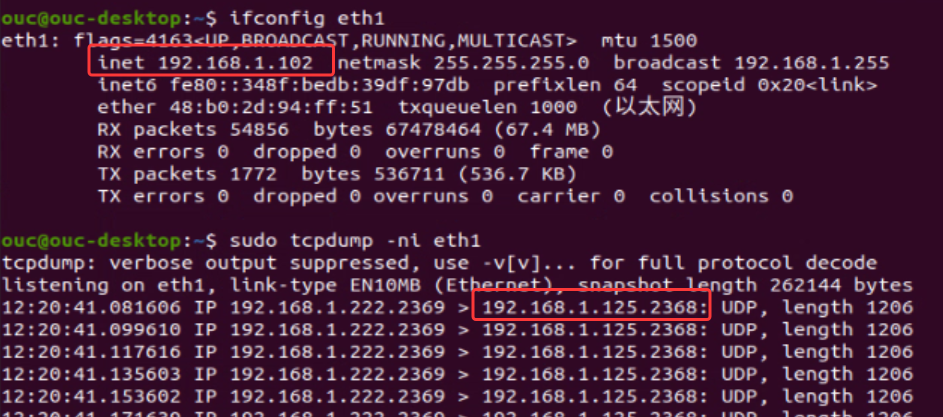
中控ip未能和雷达ip处在同一局域网,可使用ifconfig eth1查看中控设置的IP
-
-
由步骤2中IP 192.168.1.22.2369 > 192.168.1.125.2368: UDP可知
雷达ip为192.168.1.22,发送消息的端口号为2369
中控ip为192.168.1.125,接收消息的端口号为2368
使用UDP协议进行通讯
注:这里我把eth1的ip改为了192.168.1.102,并使用tcpdump进行抓包,也可接收到雷达数据,因为它们此刻处于一个局域网。
-
打开demo文件夹中的main.cpp和main_PCL.cpp,把以下ip和端口修改为步骤3中雷达pi、端口和中控ip、端口
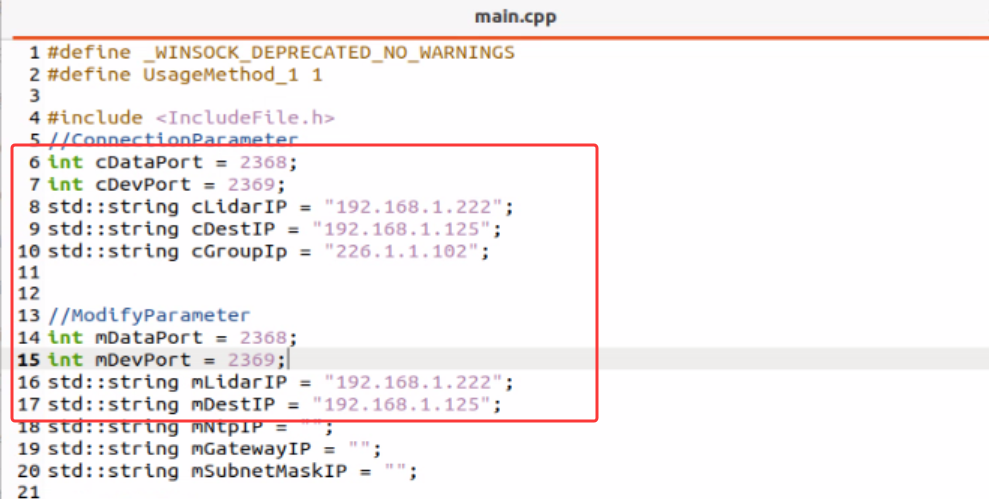
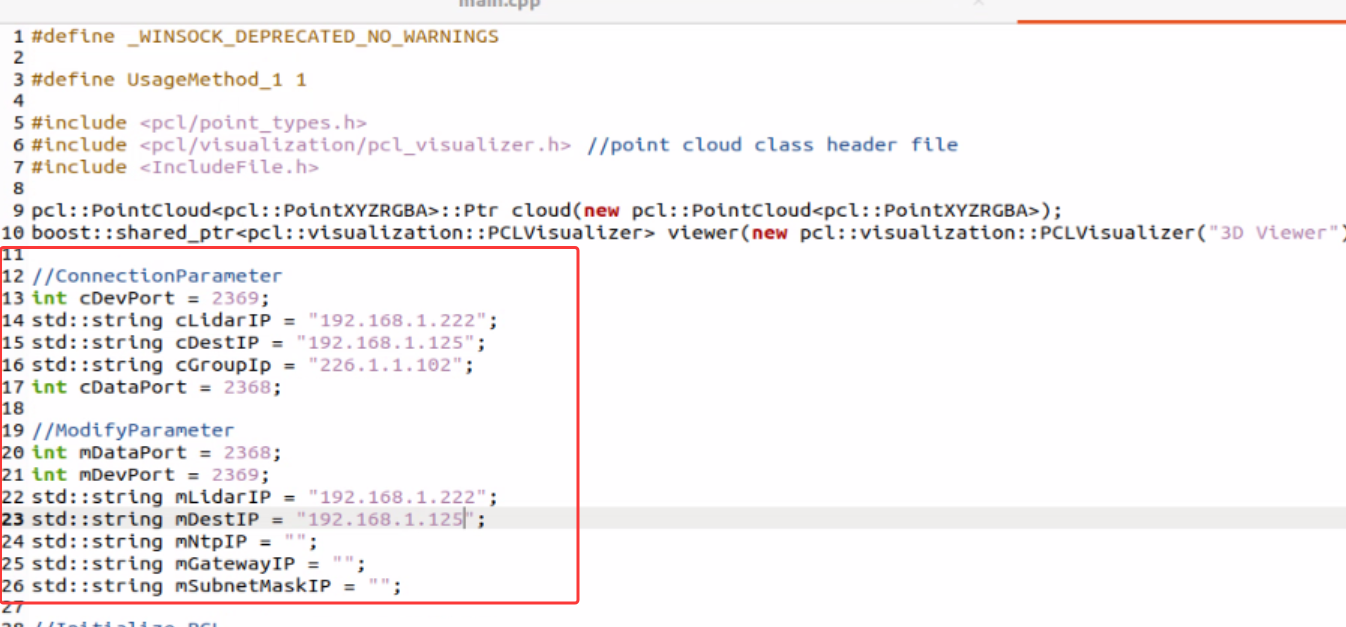
-
按3.1.2编译和运行步骤重新编译运行,下图为执行./demo_viewer后的可视化结果图,蓝色点为检测到的障碍物。

注:如果输出为Failed to bind socket,可能是端口2368被占
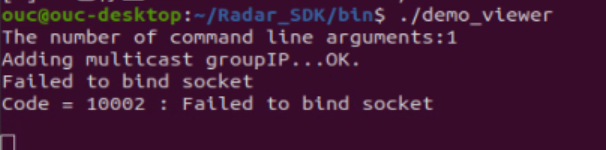
使用lsof命令查出占用2368端口的进程,并使用kill命令进行消灭
sudo lsof -i :2368 # 检查2368端口占用 sudo kill -9 XXXX #XXXX为sudo lsof -i :2368命令输出的进程号
四、代码组织结构
| bin | 编译生成的可执行文件 | |
|---|---|---|
| build | 编译的目录 | |
| include | 头文件和源文件的目录 | |
| doc | 说明文档的路径 | |
| demo | main.cpp | 一般般示例,获取点云的文件, 输出点云数据 |
| demo | main_PCL.cpp | 获取点云的文件,增加PCL 可视化的库,显示点云 |
| demo | main_PCL_Pcap.cpp | 获取点云的文件,增加PCL 可视化的库,pcap的离线解 析示例,显示点云: 注意:离线的文件要放到 demo/PcapPacketPath文件 夹内并在源文件中修改对应 的文件main_PCL_Pcap.cpp 内修改离线包的名称 |
| CMakeLists.txt | Cmake文件,配置编译项目 配置编译规则 |

















 628
628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









