






目录
三、LOAM (Lidar Odometry and Mapping in Real-time)
一、SLAM简介
SLAM是机器人实现自主移动的关键,其问题可以理解为如下的生活问题。
当我们来到一个陌生的环境时,为了迅速熟悉周围环境,我们一般会做:
-
用眼睛观察周围地标如建筑、大树、花坛等,并记住他们的特征(
特征提取) -
在自己的脑海中,根据双目获得的信息,把特征地标在三维地图中重建出来(
三维重建) -
当自己在行走时,不断获取新的特征地标,并且校正自己头脑中的地图模型(
bundle adjustment or EKF) -
根据自己前一段时间行走获得的特征地标,确定自己的位置(
trajectory) -
走了很长一段路的时候,和脑海中的以往地标进行匹配,看一看是否走回了原路(
loop-closure detection)
目前用在SLAM上的Sensor主要分两大类,激光雷达和摄像头。故SLAM大致可以分为激光SLAM(也分2D和3D)和视觉SLAM(也分Sparse、semiDense、Dense)两类,但其主要思路大同小异。
SLAM算法在实现的时候主要要考虑以下4大核心方面:
-
地图表示与建模策略:稀疏地图(如特征点、线段)适合实时定位与轻量导航,稠密地图(如点云、网格、体素)适用于精细场景重建或机器人交互。
-
传感器配置:根据场景约束(如室内 / 室外、光照条件)选择传感器类型(激光雷达、视觉相机(单目 / 双目 / RGBD)、IMU 等)。单传感器视野局限(如 RGBD 相机 FOV 小、激光雷达水平角分辨率高但垂直视野窄)需通过多传感器互补(如结合 IMU 预测运动补偿视角盲区)。
-
数据关联与多传感器融合: 跨模态匹配:处理不同传感器数据类型差异(如图像特征点、激光雷达点云、IMU 运动数据),设计统一的特征表示(如将点云投影到图像平面进行联合匹配)或概率模型(如扩展卡尔曼滤波中的状态融合)。 时间戳对齐与异步处理:解决传感器采样频率不一致问题(如 IMU 高频输出与相机低频成像),通过插值、队列管理或异步优化(如滑动窗口滤波)实现数据融合。 关联歧义性:应对动态环境中特征匹配的误关联(如相似纹理区域、移动物体干扰),需引入几何约束(如对极几何、ICP 配准)、运动模型(如里程计预测)或机器学习方法(如深度学习特征描述子)提升鲁棒性。
-
定位与构图的状态估计及优化
-
位姿估计方法:
-
前端里程计:基于相邻帧的相对运动估计(如视觉里程计 VO、激光里程计 LO),需处理快速运动、低纹理或重复结构场景下的退化问题(如引入 IMU 构建视觉惯性里程计 VIO)。
-
后端全局优化:通过图优化(Graph-based SLAM)或滤波器(如扩展卡尔曼滤波)融合历史数据,消除累计误差(如回环检测后优化全局位姿图),实现全局一致性。
-
-
动态环境适应:区分静态与动态物体(如通过光流、点云运动检测),避免误将移动物体纳入地图(如剔除动态点云、语义分割辅助动态建模)。
-
计算效率优化:针对实时性要求(如移动机器人低算力平台),设计稀疏化策略(如关键帧选取、子图划分)、增量式优化(如滑动窗口滤波)或硬件加速(GPU 并行计算)。
-
二、激光雷达
2.1激光雷达简介
激光雷达传感器由两部分组成:激光发射(顶部)和激光接收(底部)。发射系统的工作原理是利用多层激光束,层数越多,激光雷达就越精确。层数越多,传感器就越大。激光被发射到障碍物并反射,当这些激光击中障碍物时,它们会产生一组点云,传感器与飞行时间(TOF)进行工作,从本质上说,它测量的是每束激光反射回来所需的时间。如下图
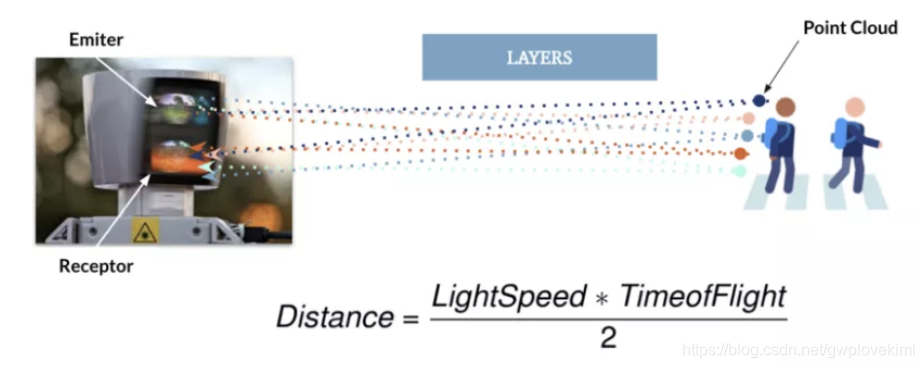
激光雷达传感器可以是固态的,也可以是旋转的,固态激光雷达将把检测的重点放在一个位置上,并提供一个覆盖范围(比如FOV为90° )。在后一种情况下,它将围绕自身旋转,并提供360度旋转。在这种情况下,一般把它放在设备顶上,以提高能见度。
激光雷达进行障碍物识别的步骤通常分为4个步骤:
-
点云预处理:提升数据质量 目标:去除噪声、降低数据冗余、对齐多传感器数据。
-
统计滤波:通过计算邻域点的统计特性(如均值、标准差)剔除离群点(如激光雷达回波异常的孤立点)。
-
体素网格滤波:将点云划分为三维网格(体素),每个体素仅保留一个代表性点(如质心),减少数据量并平滑密度差异
-
运动补偿:对于高速运动平台(如自动驾驶车辆),需通过 IMU 或里程计数据补偿激光雷达旋转或平移带来的点云畸变。
-
多传感器校准:完成激光雷达与其他传感器(如摄像头、IMU)的时间同步和空间外参标定(如手眼校准),确保数据时空一致性。
-
-
地面分割:分离静态背景与障碍物 目标:从点云中提取地面点,剩余点作为潜在障碍物。
-
RANSAC(随机抽样一致性):通过迭代随机采样点拟合平面(如地面),计算内点比例,保留最优平面。例如,在自动驾驶场景中,RANSAC 可拟合道路平面,剔除地面点后剩余点即为障碍物候选。
-
高斯过程(GP-INSAC):结合概率模型提升平面拟合鲁棒性,适用于复杂地形(如非平整路面)。
-
高度阈值法:利用激光雷达安装高度和地面高度范围,通过 z 轴阈值筛选障碍物点。例如,农业机器人中,设定 z 值高于地面一定范围的点为障碍物
-
-
障碍物聚类与特征提取:识别独立障碍物 目标:将障碍物点云分割为独立团簇,并提取几何特征。
-
聚类算法:
-
欧氏聚类:基于点间欧氏距离分组,适用于离散障碍物(如车辆、行人)。例如,PCL 库中的欧氏聚类算法可设置距离阈值(如 0.5 米)和最小点数(如 10 个点),将点云划分为多个障碍物簇。
-
DBSCAN聚类:基于密度的聚类,能处理任意形状障碍物,抗噪声能力强。
-
-
特征提取:
-
几何特征:计算聚类质心、包围盒尺寸(长宽高)、点云密度等。
-
运动特征:结合多帧点云计算障碍物速度、加速度(如通过卡尔曼滤波预测轨迹)
-
-
-
障碍物识别与跟踪:动态环境下的持续感知
目标:为障碍物分配唯一标识,预测运动状态,输出实时信息。
-
分类与匹配:
-
机器学习分类器:通过 SVM、随机森林等模型对障碍物进行分类(如车辆、行人、路障)。
-
数据关联:基于位置、速度等信息匹配前后帧障碍物,避免 ID 跳变。例如,联合概率数据关联(JPDA)算法可处理多目标跟踪中的误匹配问题3。
-
-
状态估计与滤波:
-
卡尔曼滤波(KF)/ 扩展卡尔曼滤波(EKF):融合传感器测量值与运动模型,平滑障碍物轨迹,预测未来位置。
-
多模型交互(IMM):针对动态障碍物(如突然加速的车辆),结合多个运动模型(如匀速、匀加速)提升跟踪鲁棒性3。
-
-
动态障碍物处理:
-
光流法:通过相邻帧点云位移检测运动区域。
-
深度学习分割:利用 3D-MiniNet 等网络直接识别动态物体,滤除干扰点
-
-
2.2Cartographer 算法详解
2.2.1背景
Cartographer 是Google 于 2016 年开源的轻量级、实时 SLAM(同步定位与地图构建)算法,支持2D 和 3D 场景,核心优势是高精度、低计算资源消耗和大规模环境适配。其设计目标是为移动机器人(如仓储机器人、自动驾驶车)提供可靠的定位与建图能力,尤其适合计算资源受限的嵌入式设备(如手机、无人机)。
2.2.2核心架构与技术模块
Cartographer 采用模块化设计,核心分为前端(里程计与子图构建)和后端(闭环检测与全局优化),辅以传感器融合与高效数据结构。
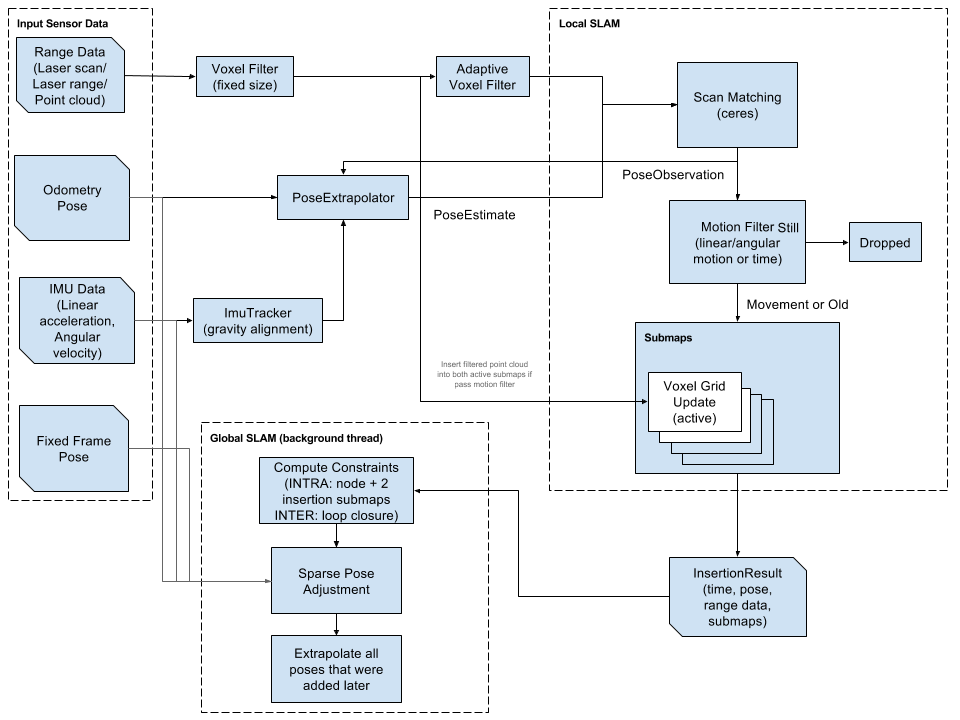
1. 前端:局部定位与子图构建
-
输入数据:
-
激光雷达扫描数据(如 2D 的 2D LiDAR 或 3D 的 Velodyne);
-
惯性测量单元(IMU)数据(用于运动补偿);
-
轮式里程计数据(可选,提升初始位姿估计)。
-
-
核心功能:
-
运动畸变校正(Motion Compensation): 利用 IMU 的角速度和加速度数据,将激光扫描过程中平台的运动(如旋转、平移)补偿到每一帧点云,避免因运动导致的点云失真(例如快速旋转时的 “拖尾” 现象)。 例:若激光雷达扫描时间为 100ms,IMU 数据可将每个激光束的时间戳对齐到扫描瞬间的位姿。
-
扫描匹配(Scan Matching): 将当前激光扫描(称为 “节点”,Node)与已构建的局部子图(Submap)进行匹配,估计当前位姿(平移、旋转)。Cartographer 支持两种扫描匹配算法:
-
正态分布变换(NDT, Normal Distributions Transform): 将子图点云转换为多维正态分布的概率密度场,通过最大化当前扫描点与分布场的匹配概率求解位姿。优点是计算效率高(O (n log n)),适合实时性要求高的场景。
-
迭代最近点(ICP, Iterative Closest Point): 通过迭代寻找最近点对并最小化距离误差求解位姿,精度高但计算复杂度较高(O (n²)),常用于初始位姿不确定的场景。
-
-
子图构建(Submap Construction): 将连续的激光扫描(节点)通过扫描匹配累积到子图中,子图是局部点云的融合结果(去除冗余点,保留表面特征)。每个子图包含一系列节点的位姿估计,且一旦优化完成即被 “冻结”,不再参与后续局部匹配,仅用于闭环检测和全局优化。 关键数据结构:子图以稀疏点云形式存储,每个子图对应一个局部地图块,用于快速局部定位。
-
2. 后端:闭环检测与全局优化
-
闭环检测(Loop Closure): 检测机器人是否回到历史位置(回环),若检测到回环,则通过全局扫描匹配计算当前位姿与历史位姿的约束,消除累积误差。
-
回环候选检测: 通过空间位置近邻法(如基于位姿图的空间邻近节点筛选)或外观匹配法(如 3D 点云特征匹配,2D 中可用激光雷达强度信息)快速筛选可能的回环候选。
-
全局扫描匹配: 对候选回环的当前扫描与历史子图进行高精度匹配(如使用更耗时的 ICP 算法),生成可靠的回环约束(位姿变换矩阵)。
-
-
位姿图优化(Pose Graph Optimization): 将整个 SLAM 过程建模为图结构:
-
节点:代表机器人在不同时刻的位姿(前端生成的局部位姿估计);
-
边:代表节点间的约束(如相邻节点的里程计约束、回环检测的全局约束)。 通过优化算法(如 Ceres Solver 或 g2o 库)最小化所有约束的误差平方和,调整全局位姿,消除累积误差。
-
3. 传感器融合与实时性优化
-
IMU 融合: IMU 数据用于提供高频位姿预测,辅助激光扫描的运动补偿,避免因快速运动导致的扫描匹配失败(如无人机高速飞行场景)。
-
高效内存管理: 子图在优化后仅保留关键帧和融合点云,删除冗余数据,支持长时间运行的大规模建图(如仓库、城市街区)。
-
多分辨率地图: 2D 版本中,地图以不同分辨率(如 0.05m、0.5m)存储,兼顾细节精度与全局概览;3D 版本采用体素网格(Voxel Grid)压缩点云。
2.2.3算法流程(以 2D 为例)
-
数据输入与预处理:激光雷达扫描生成点云,IMU 提供实时运动数据,矫正点云畸变。
-
前端里程计:当前扫描与最新子图进行 NDT 匹配,得到初始位姿估计,添加到当前子图。若当前子图的扫描次数超过阈值(如 10 次),则冻结该子图,新建子图。
-
闭环检测:定期筛选与当前位姿邻近的历史子图,进行全局扫描匹配(如 ICP),检测回环。
-
全局优化:若检测到回环,构建位姿图,优化所有节点位姿,更新全局地图。
-
地图输出:融合所有子图的点云,生成全局一致的 2D 占据栅格地图(Occupancy Grid)或 3D 点云地图。
三、LOAM (Lidar Odometry and Mapping in Real-time)
LOAM是Ji Zhang早期开源的多线LiDAR SLAM算法。上文介绍的cartographer主要解决室内问题,LOAM室内外都可以,但是没有回环检测。Cartographer的3D部分,更像是2D的扩展:即用2D的思路去做3D的事情。而LOAM则主要解决3D问题,其核心思路难以解决2D问题。
2.1框架

-
Point Cloud Registration:点云不是同一时刻获取的,每一个帧点云,其中的每一个点,都是不同时刻获取的,因此把它进行运动补偿: 获取每个点的时间戳,位姿插值,把点云先投影到同一时刻;提取特征点。
-
Lidar Odometry: 估计两帧点云之间的位姿变换,获得两个时刻之间的相对位姿,频率较高 10Hz
-
Lidar Mapping: 建图模块,把连续10帧的点云数据和整个地图匹配,获得世界坐标系下的位姿,频率较低 1Hz。
-
Transform Intergration:实时利用世界坐标系下的位姿和两个时刻之间的相对位姿,更新各个时刻世界坐标系下的位姿。
Cartographer使用栅格地图,地图中存储着占据概率,通过把点云投影到栅格地图,计算匹配得分,找到最合适的投影,作为位姿变换。但是,LOAM使用的是点云地图,那么点云投影后,进行匹配的就还是点云地图。 两堆点云,如何匹配?
传统方法,使用ICP方法,即默认两堆点云中最近的点是匹配点,构建矩阵进行奇异值分解,得到变换矩阵后投影点云,然后再次寻找匹配点,重新计算投影……直至收敛。然而,对SLAM算法而言,要求同步定位和建图。这样随便根据距离选匹配点,计算太复杂,可能算来算去都不收敛,压根就不能实时,计算量实在是太大了。LOAM作者决定对点云提取特征,然后根据稀疏的特征来计算位姿变换。 作者决定提取两种特征点:平面点和边缘点。 对于平面点与边缘点,作者引入曲率计算方法,直接利用激光的每条扫瞄线中,一个点前后各五个点,计算平均值到该点的距离。

直观理解如下图示

-
平面点:在三维空间中处于平滑平面上的点,其和周围点的大小差距不大,曲率较低,平滑度较低。
-
边缘点:在三维空间中处于尖锐边缘上的点,其和周围点的大小差距较大,曲率较高,平滑度较高
边缘点匹配方法:
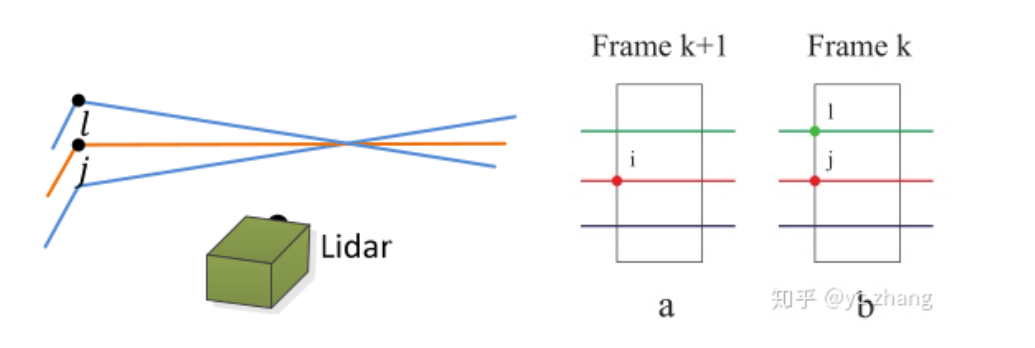
红、绿、蓝代表多线激光雷达的扫描线; 在第k+1帧中,边缘点i处在红色的扫瞄线上;在第k帧中,红线上的边缘点j和i更近,在相邻绿线上再找到一个最近的边缘点l,那么l和j构成一个边缘。 因此,对边缘特征点来说,优化的目标就是,使i到直线lj的距离最近。
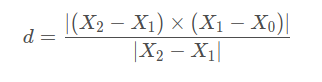
向量叉乘的模长,代表平行四边形的面积; 除以底,代表平行四边形的高; 也就是点到直线的距离。
平面点匹配方法
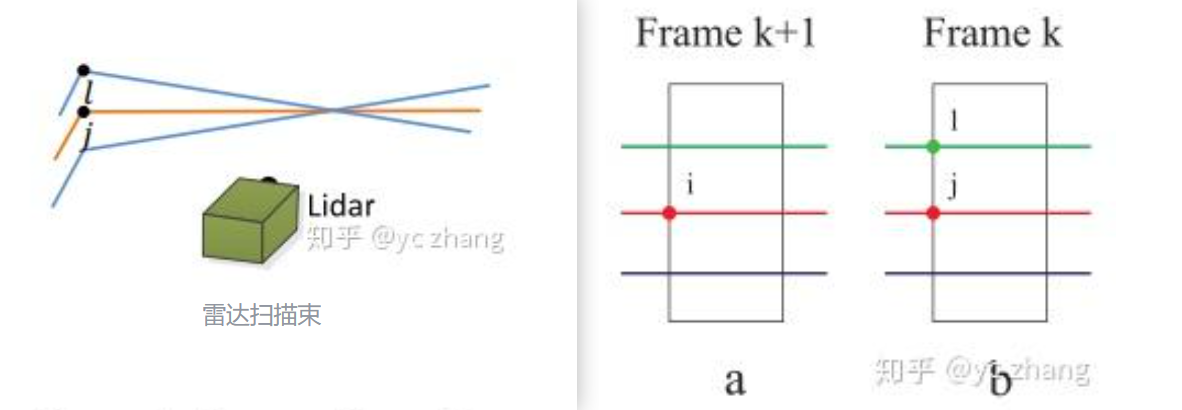
红、绿、蓝代表多线激光雷达的扫描线; 在第k+1帧中,平面点i处在红色的扫瞄线上; 在第k帧中,红线上的平面点j和i更近,在同线上再找到一个附近的平面点l,在相邻绿线上再找到一个最近的平面点m,那么lmj构成一个平面。 因此,对平面特征点来说,优化的目标就是,i到平面mlj的距离最近。
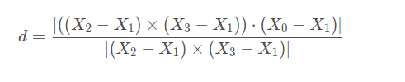
分子:三维物体的体积; 分母:地面构成的平行四边形的面积; 高=体积/面积 也就是点到平面的距离。
运动估计
-
在确定了两个优化目标:边缘点到边缘线的距离、平面点到平面的距离以后,就可以对特征点进行旋转,构建目标函数,通过非线性优化的方式进行梯度下降求解了。
-
作者论文中使用的求解方法是列文伯格-马尔夸特算法(LM),又叫阻尼牛顿法,可以避免求解中遇到的非奇异和病态问题。
scan-scan流程图
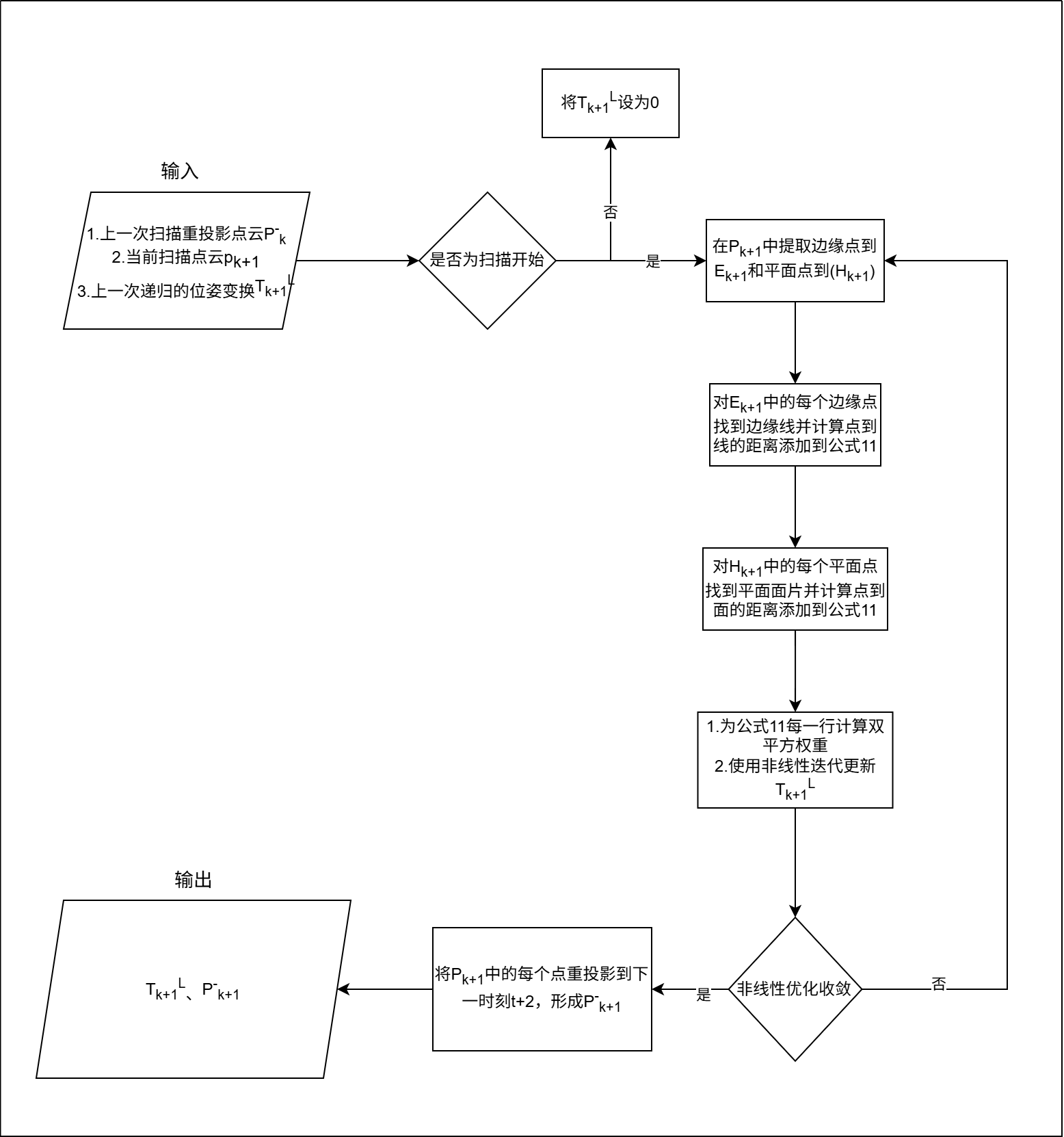
该算法通过迭代优化激光雷达的位姿变换Tk+1L,结合特征点的几何关系与稳健拟合,实现对激光雷达运动的实时估计,同时校正点云失真,为后续建图提供准确的位姿信息。
地图构建和全局位姿
-
建图部分采用scan-map的匹配,仍然是基于边缘点和平面点,投影点云,计算点到直线和点到平面的距离。
-
里程计的匹配,是用两帧点云数据;
-
建图的匹配,是用10帧点云数据,和10立方米范围内的整个地图匹配。
-
特征点增加了10倍!
scan-map流程图
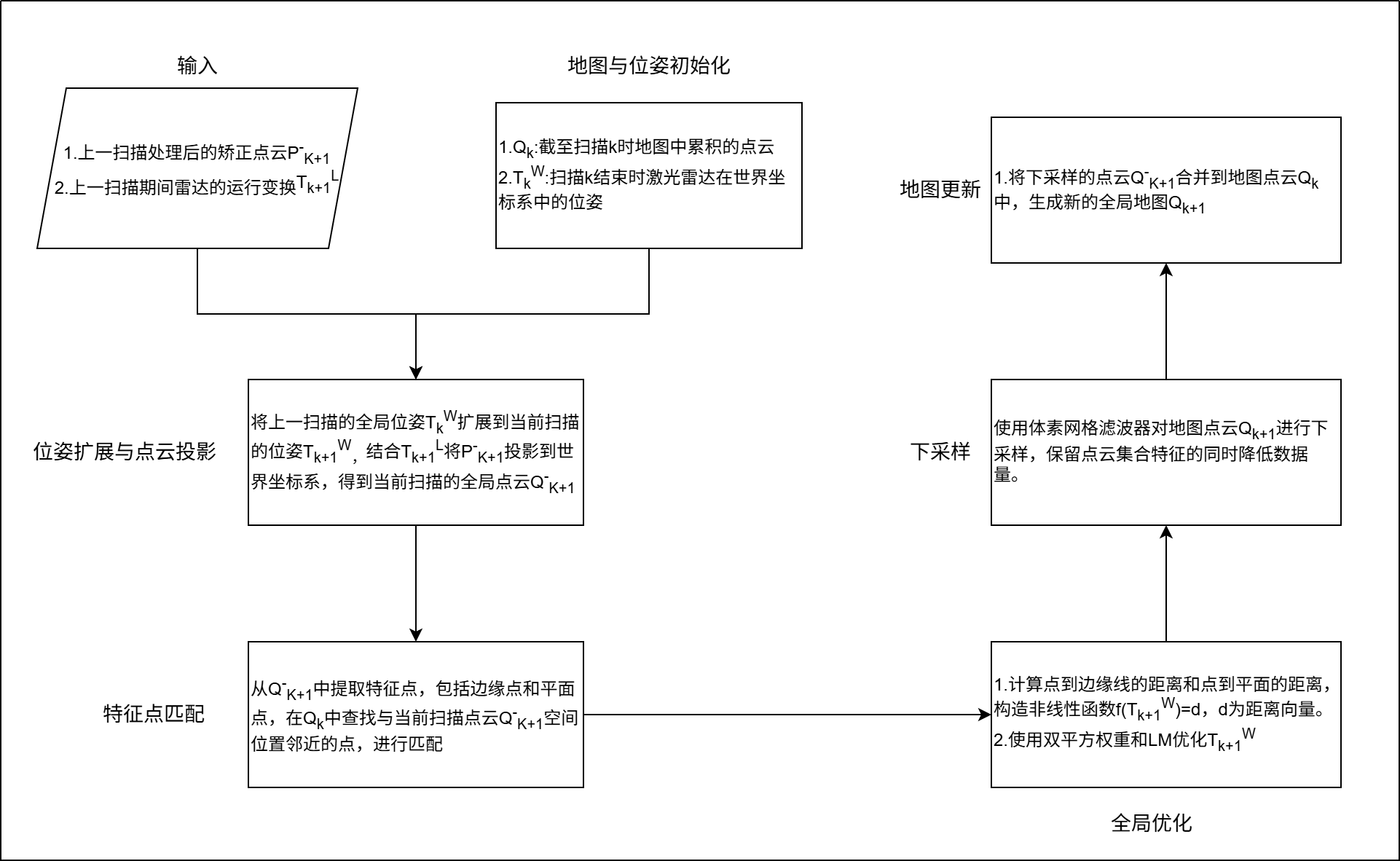
建图流程通过 位姿扩展→点云投影→特征匹配→全局优化→地图更新 的闭环,将当前扫描的点云精确注册到全局地图中。通过分层处理(特征点提取、几何匹配、非线性优化)和数据优化(下采样),在保证精度的同时控制计算复杂度,实现实时高效的 3D 建图。
四、其他衍生算法
4.1各算法改进点
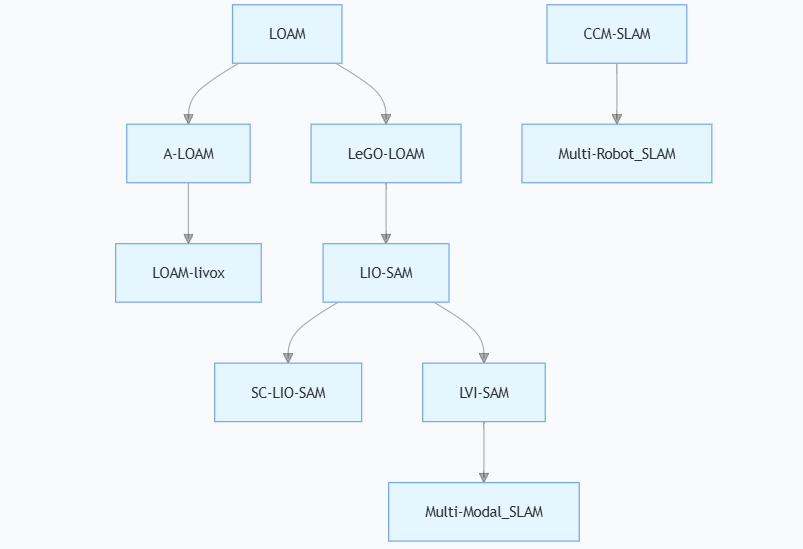
1. LOAM(2014)
-
基础:无直接前身,首创点线面特征匹配 + Scan-to-Map架构。
-
改进点:
-
提出曲率极值点提取方法,将点云分为边缘特征(线)和平行特征(面)。
-
引入运动畸变补偿,利用 IMU 预积分消除激光雷达运动模糊。
-
-
缺点:
-
动态环境敏感:未处理移动物体,易受行人、车辆干扰。
-
计算密集:依赖高频 IMU(200Hz),对硬件要求高。
-
无闭环检测:长期运行累积误差显著。
-
2. A-LOAM(2018)
-
基础:基于 LOAM 代码重构。
-
改进点:
-
代码优化:用 Ceres 优化库替代手写雅可比矩阵,提升可读性。
-
运动畸变简化:线性插值替代 IMU 预积分,降低对 IMU 精度依赖。
-
-
缺点:
-
IMU 松耦合:未将 IMU 数据纳入后端优化,动态场景精度下降。
-
无闭环检测:与 LOAM 类似,长期漂移问题未解决。
-
3. LeGO-LOAM(2018)
-
基础:基于 LOAM。
-
改进点:
-
轻量化设计:地面分割 + 两步优化(Scan-to-Scan+Scan-to-Map),计算量降低 35%。
-
闭环检测:引入基于距离的闭环机制,构建完整 SLAM 系统。
-
地图管理:关键帧管理局部地图,提升实时性。
-
-
缺点:
-
依赖地面特征:非结构化地形(如楼梯、丘陵)性能下降。
-
内存占用高:关键帧累积导致内存消耗随时间增加。
-
4. LIO-SAM(2020)
-
基础:基于 LeGO-LOAM。
-
改进点:
-
紧耦合 IMU:将 IMU 预积分与激光雷达数据融合,提升短期运动估计精度。
-
因子图优化:使用 GTSAM 框架,支持多传感器(如 GPS)融合。
-
滑动窗口优化:边缘化旧关键帧,保持实时性。
-
-
缺点:
-
IMU 校准要求高:低精度 IMU 会导致位姿抖动。
-
无视觉信息:纹理贫瘠环境(如走廊、雪地)易失效。
-
5. SC-LIO-SAM(2022)
-
基础:基于 LIO-SAM。
-
改进点:
-
扫描上下文(Scan Context):通过全局特征描述子增强回环检测,适用于特征贫瘠环境。
-
轻量化优化:减少因子图节点数量,提升计算效率。
-
-
缺点:
-
计算复杂度增加:扫描上下文匹配引入额外计算。
-
依赖先验地图:首次建图时性能受限。
-
6. LVI-SAM(2021)
-
基础:基于 LIO-SAM。
-
改进点:
-
多传感器融合:整合激光雷达、IMU 和视觉(ORB 特征),提升动态环境鲁棒性。
-
分层优化:视觉 - IMU 子系统(VIS)和激光 - IMU 子系统(LIS)协同工作,支持单传感器失效。
-
动态物体检测:通过视觉特征剔除动态点云。
-
-
缺点:
-
硬件需求高:需同时配备激光雷达、IMU 和相机。
-
视觉局限性:低光照或无纹理环境下性能下降。
-
7. LOAM-Livox(2020)
-
基础:基于 A-LOAM。
-
改进点:
-
固态激光雷达适配:针对 Livox 非重复扫描模式,优化点云筛选和特征提取。
-
并行运动补偿:将点云分为多段并行处理,提升畸变校正精度。
-
-
缺点:
-
传感器依赖:仅支持 Livox 系列雷达,兼容性差。
-
点云稀疏:小视场(FoV)导致特征点不足,匹配困难。
-
8. CCM-SLAM(2019)
-
基础:基于 ORB-SLAM2,属于多机器人协同 SLAM独立分支。
-
改进点:
-
协同定位:多机器人共享中央服务器,通过全局束调整(GBA)优化地图。
-
通信鲁棒性:支持中断式 GBA,减少通信延迟影响。
-
-
缺点:
-
同步要求高:需严格时间同步和通信稳定性。
-
扩展性差:增加机器人数量会显著降低实时性。
-
4.2继承关系与技术演进脉络
4.3核心技术对比
| 算法 | 传感器融合方式 | 动态环境处理 | 闭环检测 | 适用场景 |
|---|---|---|---|---|
| LOAM | 松耦合 IMU | 无 | 无 | 静态、结构化环境 |
| LeGO-LOAM | 松耦合 IMU | 地面分割 | 有 | 地面移动机器人 |
| LIO-SAM | 紧耦合 IMU | 无 | 有 | 动态环境、中长距离导航 |
| LVI-SAM | 紧耦合激光 + 视觉 + IMU | 视觉动态检测 | 有 | 复杂场景(如自动驾驶) |
| CCM-SLAM | 多机器人协同 | 无 | 有 | 大规模建图、搜索救援 |

















 755
755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









