






 本文详细介绍了HC-SR04超声波测距模块的工作原理、电气参数、接线方法以及使用定时器进行精确测距的程序示例,适合机器人和电子项目开发者参考。
本文详细介绍了HC-SR04超声波测距模块的工作原理、电气参数、接线方法以及使用定时器进行精确测距的程序示例,适合机器人和电子项目开发者参考。
一、HC-SR04超声波测距模块原理

1.模块简介
HC-SR04超声波模块常用于机器人避障、物体测距、液位检测、公共安防、停车场检测等场所。HC-SR04超声波模块主要是由两个通用的压电陶瓷超声传感器,并加外围信号处理电路构成的。
两个压电陶瓷超声传感器,一个用于发出超声波信号,一个用于接收反射回来的超声波信号。由于发出信号和接收信号都比较微弱,所以需要通过外围信号放大器提高发出信号的功率,和将反射回来信号进行放大,以能更稳定地将信号传输给单片机。
2.模块电气参数
工作电压:DC—5V
工作电流:15mA
工作频率:40Hz
电平输出:高5V
电平输出:底0V
感应角度:不大于15度
射程范围:2cm-400cm
高精度 可达0.3cm
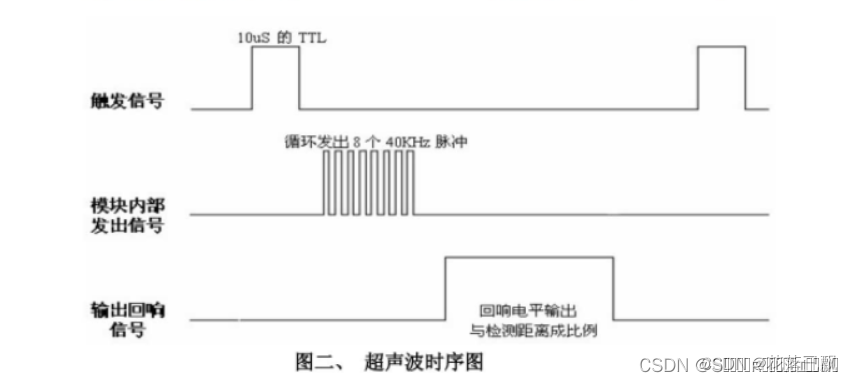
3.模块工作原理
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回, 通过 IO 口 ECHO 输出一个高电平, 高电平持续的时间就是超
波从发射到返回的时间。
4.HC-SR04超声波模块原理图
5.接线方法
超声波模块有4个引脚,接线方法如下:VCC--5VGND--GNDTrig--板子上的输出引脚(用来发射超声波信号)Echo--板子上的输入引脚(用来接收返回的超声波信号)
二、程序编写
#include <reg52.h>
#include <intrins.h>
#include "chaosheng.h"
sbit fs = P2^7;
sbit js = P2^6;
unsigned int jg;
unsigned int jl = 20;
void Delay50ms() //@11.0592MHz
{
unsigned char data i, j;
i = 90;
j = 163;
do
{
while (--j);
} while (--i);
}
void Delay10us(void) //@11.0592MHz
{
unsigned char data i;
i = 2;
while (--i);
}
void Timer1_Init()
{
TMOD = 0x10; //设置定时器模式
TL1 = 0x00; //设置定时初值
TH1 = 0x00; //设置定时初值
TR1 = 0;
}
void chaosheng () //超声波测距程序
{
fs = 1;
Delay10us ();
fs = 0;
while(js==0);
TR1 = 1;
while(js==1);
TR1 = 0;
jg = ((TH1*256+TL1)*1.7)/100;
TL1 = 0x00; //设置定时初值
TH1 = 0x00; //设置定时初值
if(jl > jg)
{
car_stop ();
Delay50ms ();
}
}

















 5972
5972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









