




 本文介绍了如何在STM32单片机上使用TIM3定时器配合HC-SR04超声波传感器进行测距,详细讲解了硬件连接、TIM输入捕获设置以及测距原理和代码实现。
本文介绍了如何在STM32单片机上使用TIM3定时器配合HC-SR04超声波传感器进行测距,详细讲解了硬件连接、TIM输入捕获设置以及测距原理和代码实现。
一、HC—SR04简介
超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。
电路板上有四个引脚:VCC、GND、Trig(触发)、Echo(回应)。
工作电压与电流:5V,15mA
感应距离:2~400cm
感测角度:不小于15度
被测物体的面积不要小于50平方厘米并且尽量平整
输入捕获原理可以看看这位大佬,感觉写的很清楚,
STM32之TIM输入捕获(IC)_stm32 tim1 输入捕获_韩立 •的博客-CSDN博客
下面这部分是超声波模块测距的实现
原理图:
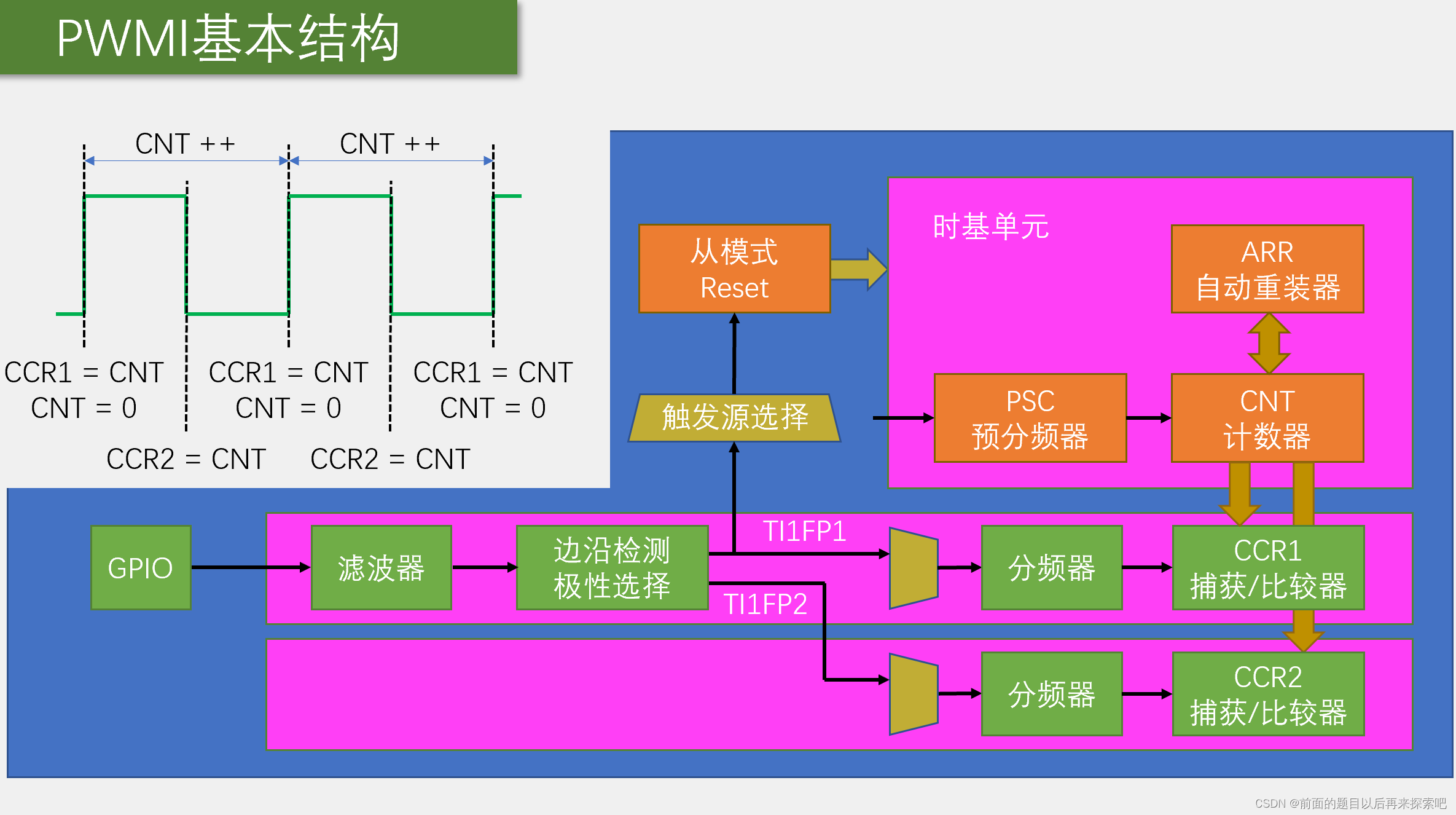
分析:
通道1设置为上升沿触发,触发的瞬间会将CNT的值记录到CCR1里面,同时设置通道1触发带有从模式,并把从模式设置为置零CNT
通道2设置为下降沿触发,触发瞬间会将CNT的记录到CCR2中,由于上升沿触发时已经将CNT置零所以此时的CNT的值就是高电平的持续时间。
//通道一
TIM_ICInitTypeDef TIM_IC_InitStructure;
TIM_IC_InitStructure.TIM_Channel=TIM_Channel_1;//捕获通道一
T 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









