






注:初识卡尔曼滤波,谨此记录
学习视频:b站【MATLAB中国】
1. 卡尔曼滤波器的用途
为什么使用卡尔曼滤波器?
- 卡尔曼滤波器是一种优化估计算法,可以预测感兴趣的参数(例如位置、速度、方向)
- 应用:制导与导航控制系统、计算机视觉系统以及信号处理
接下来举两个例子说明卡尔曼滤波器的常见用途:
用途1
eg1.【用途】 用来估算系统状态,当它无法被直接测量时
我们要出发去火星,如果我们的太空船的发动机能在足够高的温度下燃烧燃料,那么它产生的推力就足够让我们进入火星,但过高的温度会使发动机机械部件处于危险之中。
为了避免这一问题,我们需要密切关注燃烧室的内部温度Tin,但这并不容易,因为如果传感器放在发动机燃烧室内就会被熔化掉。因此,我们将传感器放在燃烧室附件温度较低的地方Text。
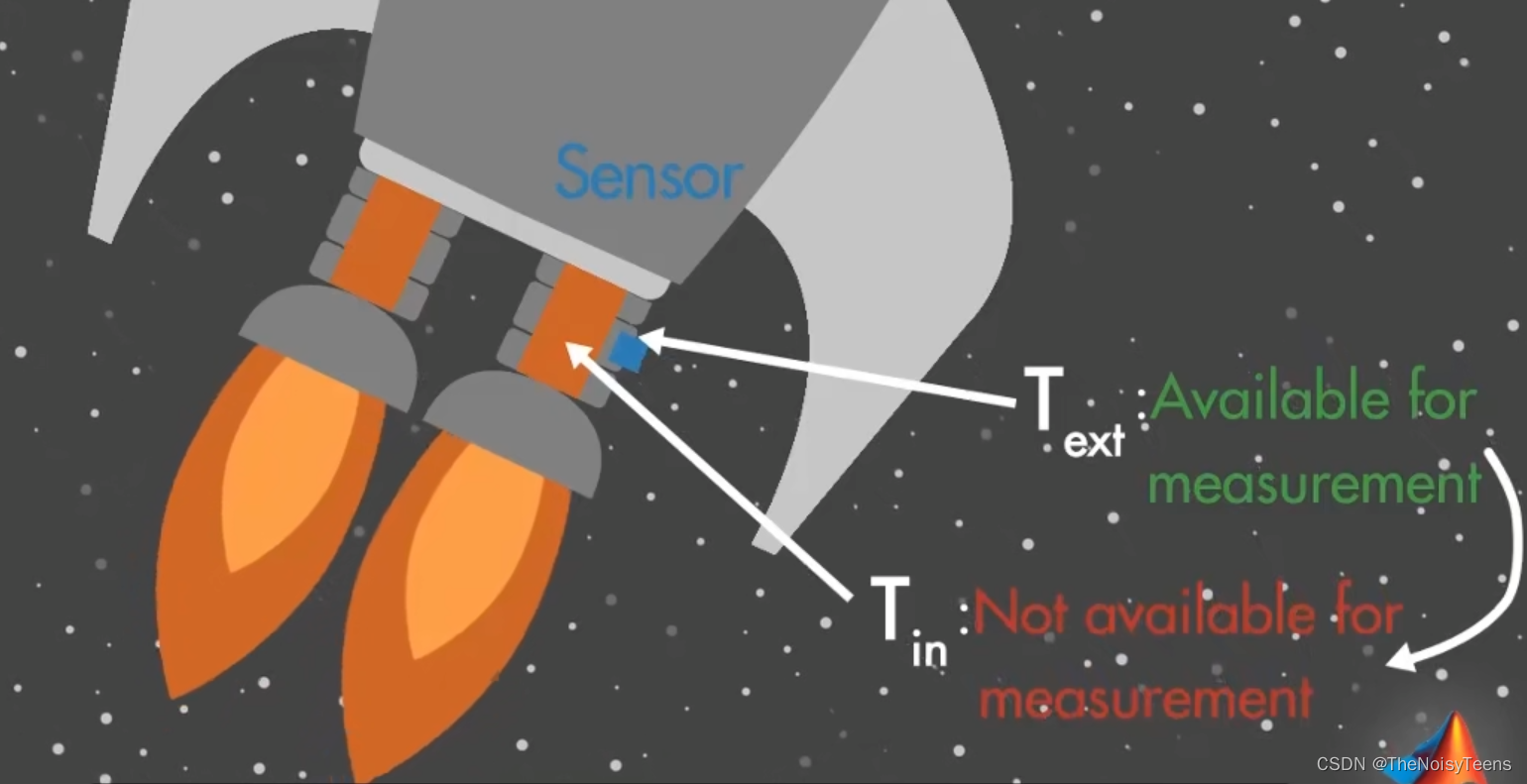
此时,我们无法直接得到内部温度Tin,只能测得附件外部温度Text。这时,我们就可以利用卡尔曼滤波器,利用间接测量值,计算内部温度的最优估算值(这样就能获取原本测不到的值,利用能测得的值)。
用途2
eg2. 如何使用卡尔曼滤波器来估计系统的状态,通过组合各种可能受噪音影响的数据源
我们需要去机场接机——使用汽车的导航系统,让我们看看车载传感器,那些得到当前位置并将我们导航到机场的传感器
- 惯性单元IMU:使用加速度计和陀螺仪来测量汽车的加速度和角速度
- 里程表:测量汽车行驶的相对距离
- GPS:接收来自卫星的信号,并定位汽车所在地球表面的位置。
而在隧道中,很难利用GPS进行定位。为了更准确的获取汽车当前位置,可以使用IMU测量值和里程表读数
总而言之,传感器可以测量汽车的相对位置,可以快速更新但也容易漂移。GPS接收器提供绝对位置,但它更新没那么快,而且可能会有噪音。这时,我们就**可以使用卡尔曼滤波器结合三个测量值,得到汽车最合适的估算位置。
★总结
- 卡尔曼滤波器用于优化估算我们感兴趣的量
- 用途1:当这些量无法直接测量,但可以间接测量的时候
- 用途2:用于估算系统状态,通过组合各种可能受噪音影响的传感器测量值
2. 卡尔曼滤波器是什么
卡尔曼滤波器是一种设计最优状态观测器的方法。
状态观测器
状态观察可以帮助我们估计无法直接查看或测量的内容。
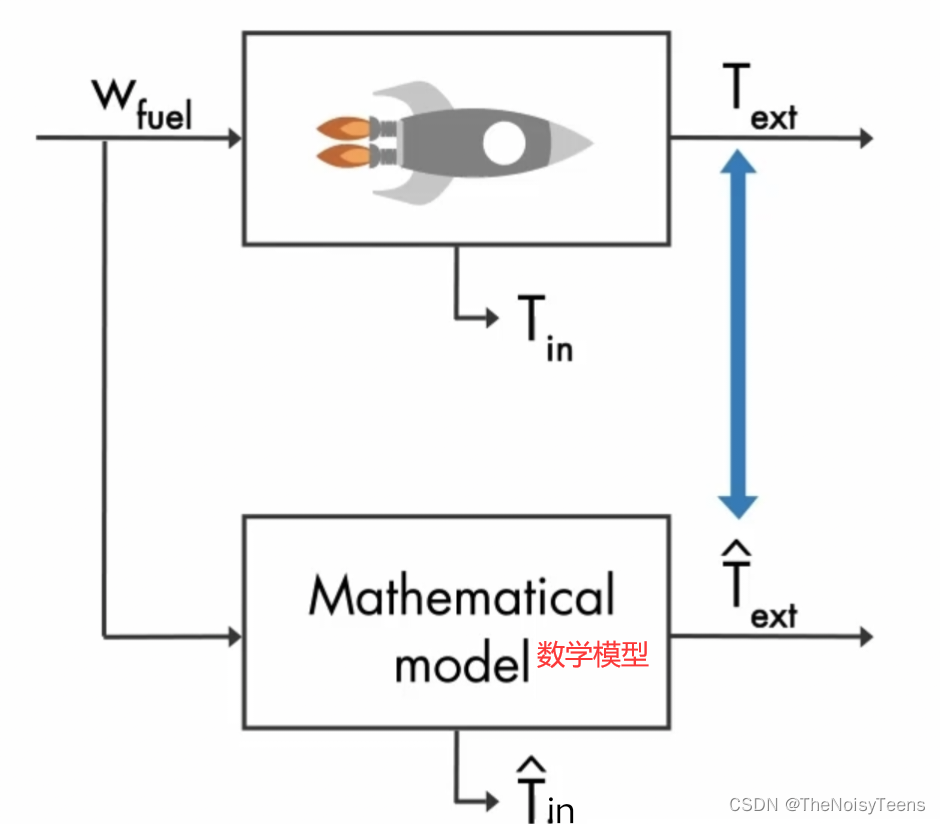
使用之前飞船燃料室的内部温度的例子,可以使用燃油流量和测量值来估算其内部温度。那么如何估算内部温度呢?
将燃油量值输入我们的数学模型,将会得到估算的输出。但是估算的外部温度并不能吻合测量的温度,这就是为什么要使用状态估算器来估算内部状态。
状态估算器的工作原理:
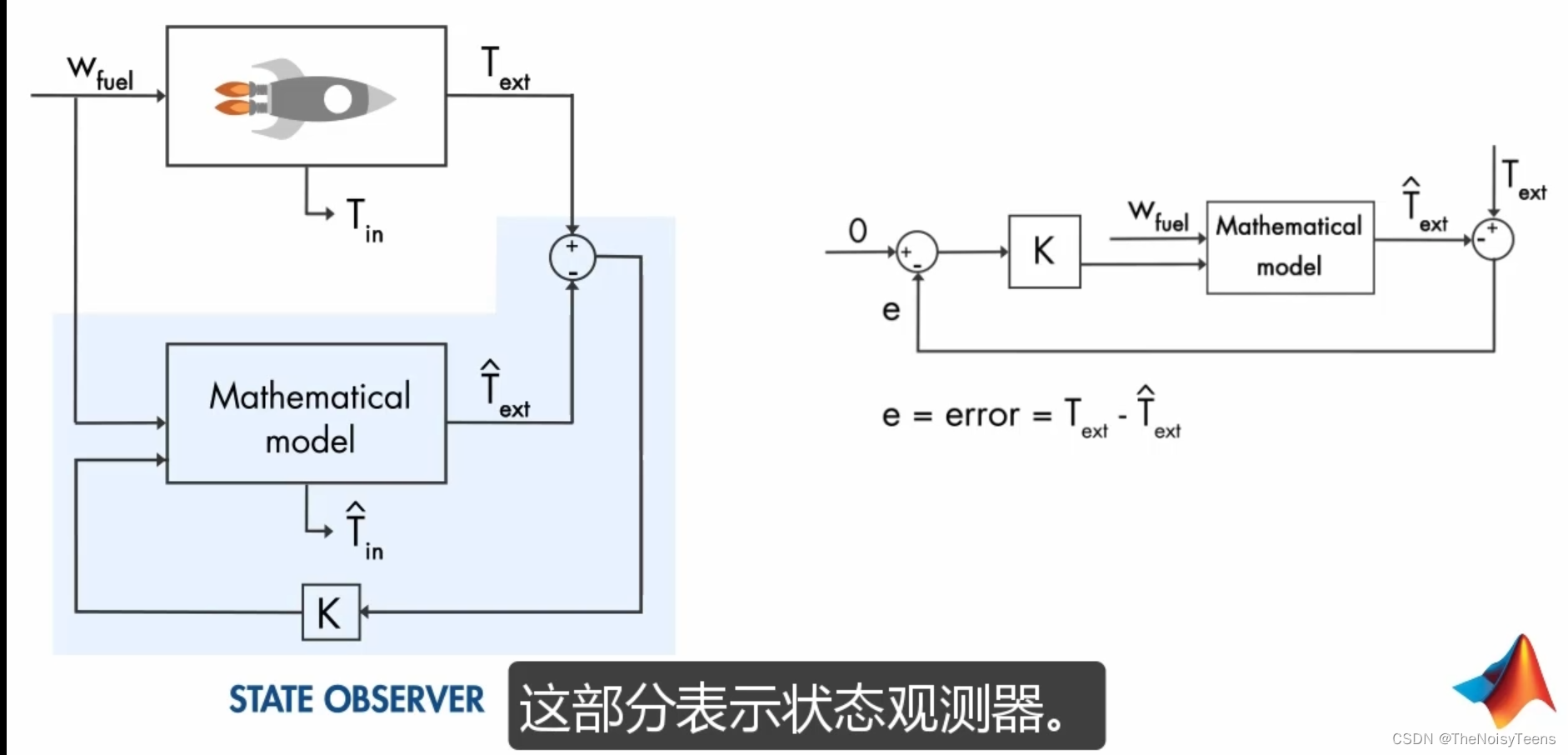
- 目标是估计的外部温度与测量的外部温度能吻合(如果这两者相等,说明表示模型收敛到了真实系统),那么估算的内部温度也能达到收敛到真实内部温度)。我们需要做的就是尽量减少估算和测量的外部温度之间的差异
- 通过状态器及其控制器K形成的闭环,尝试消除估算和测量外部温度之间的误差
- 总而言之,无法直接测量内部发动机温度,但是知道火箭的燃油量,我们可以运行数学模型,估算输出,再结合实际测量值来估计系统的内部状态
以数学的方式解释状态观测器
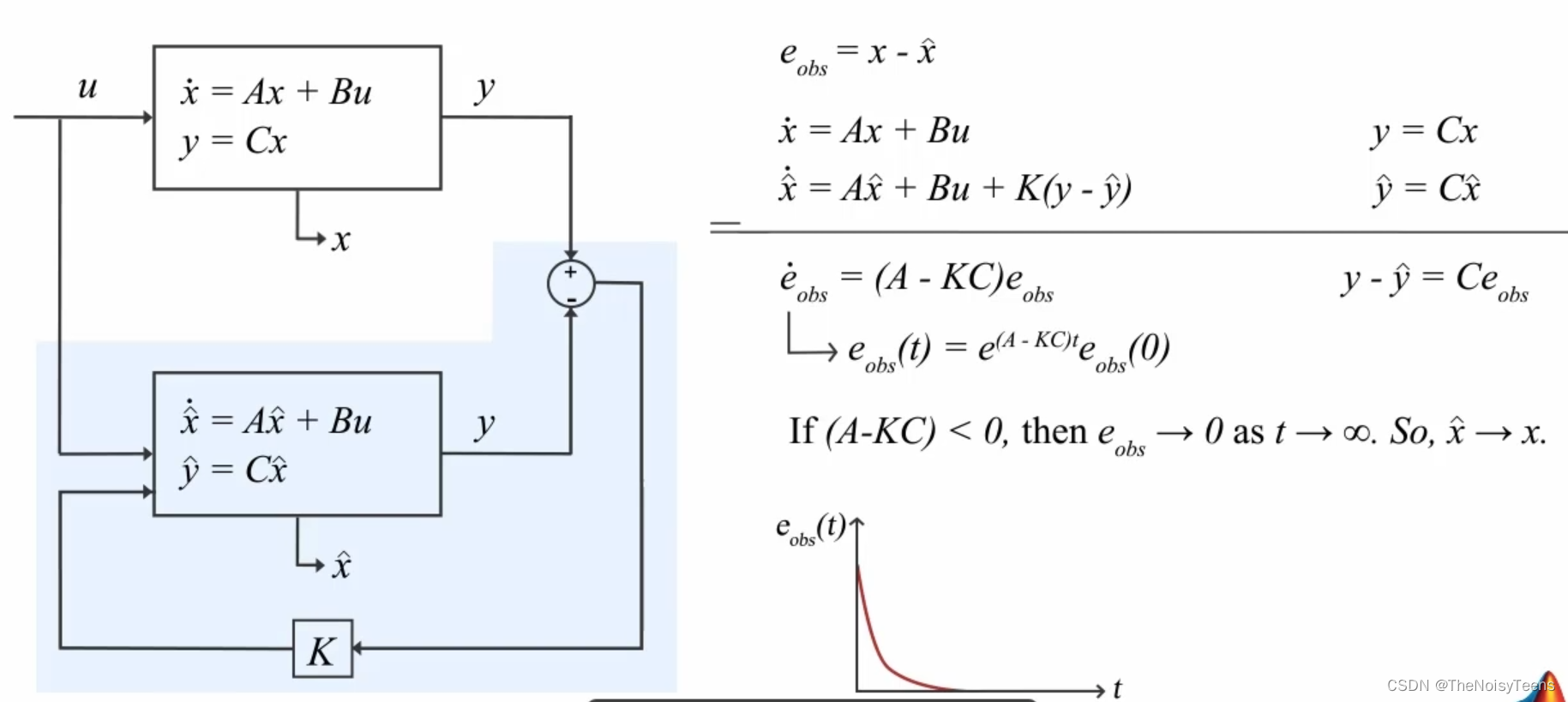
输入为u,输出为y,我们想要估计的状态为x。我们的目标是x^的估计值能逼近x,将它们之间的差值定义为误差ebos。
写出系统和观测器的方程式,相减可得误差方程。最后得到误差方程是个指数函数
**注:**给观测器建立反馈回路的重要性在于,可以控制误差函数的衰减率,通过选择相应的控制器增益K
3. 卡尔曼滤波器如何工作
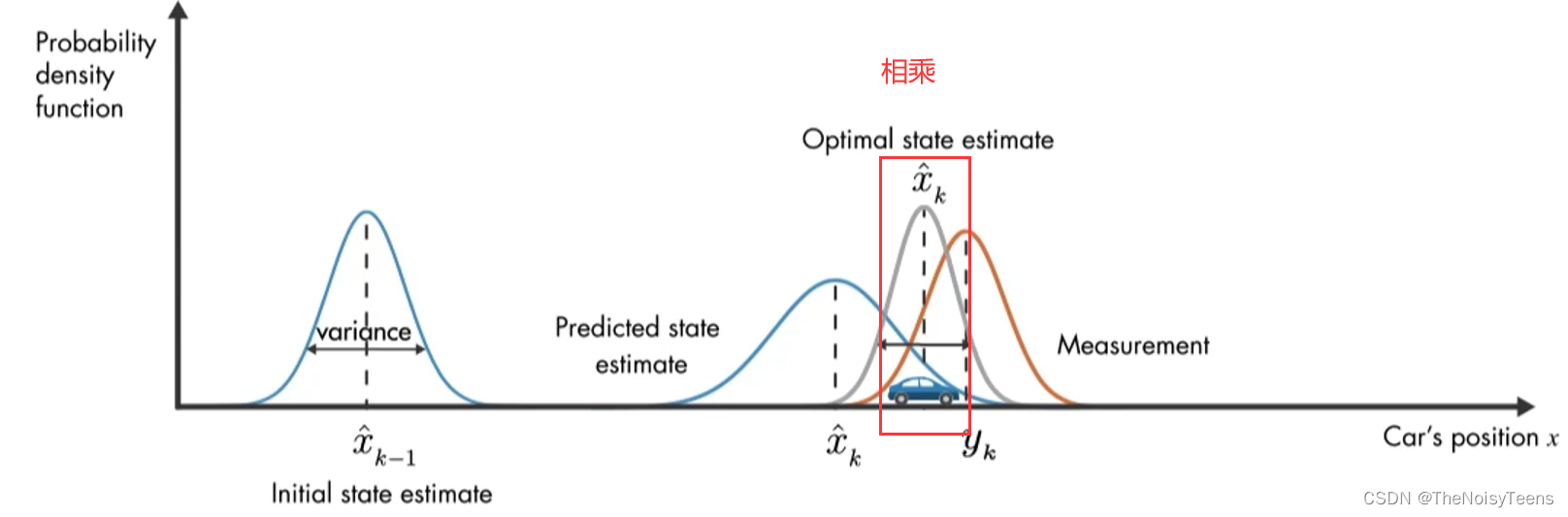
对于一组数据而言,可以用均值和方差来判断它的好坏
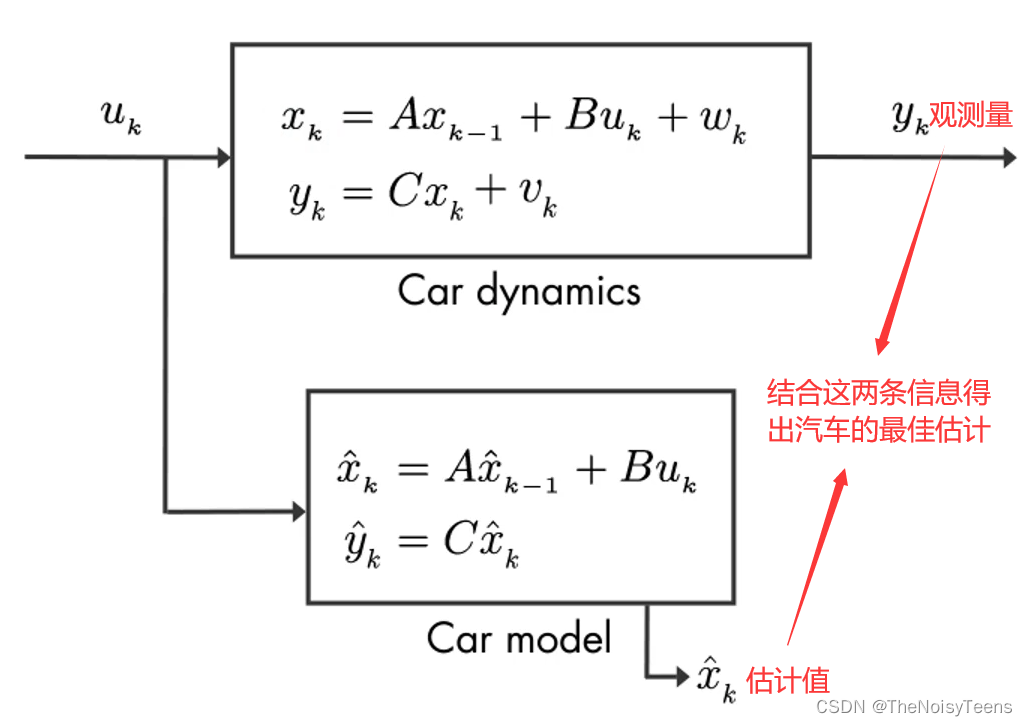
ed. 汽车的输入是油门,输出是汽车位置。该系统只有一个状态——汽车位置,我们正在测量这个状态,因此矩阵C=1。我们需要尽可能准确地得到y。
GPS噪音读数会有很多噪音,使用v表示这种测量噪音,是一个随机变量。此外还有过程噪音w,可以表示风的影响或汽车速度的变化。虽然这些噪音不遵循模式,但可以使用概率论描述它们的平均属性。设v~N(0,R) ,W~N(0,Q)















 99
99

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









