







不同路径

思路: 这道题让我求机器人到达星星位置的路径有几条,前提是只能横着走或者竖着走。
这道题我们利用动态规划来解决,dp[i][j]表示的就是到 i,j位置有几种走法。
因此容器我们选择二维数组。
初始化:
因为边界情况只有1种走法,因此我们初始化边界都为1。
int[][] dp = new int[m][n];
for(int i = 0;i<m;i++){
dp[i][0] = 1;
}
for(int j = 0;j<n;j++){
dp[0][j] = 1;
}

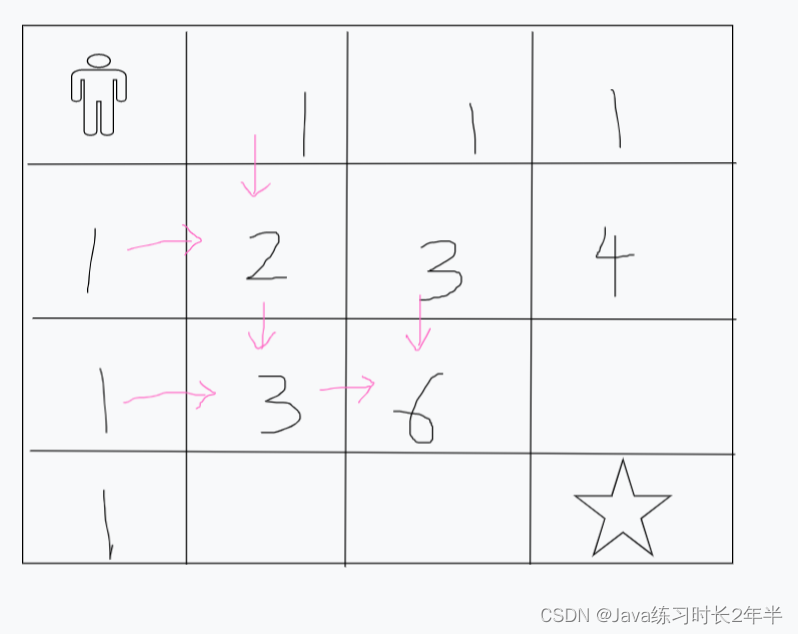
由这个图形就可以得出dp公式 斜对角的2 就等于上方的路径数加上左方的路径数。
因此dp公式:
//到i,j位置的不同走法,为上边的加上左边
dp[i][j] = dp[i-1][j] + dp[i][j-1];
遍历顺序自然是从上到下,从左到右。
for(int i = 1;i<m;i++){
for(int j = 1;j<n;j++){
//到i,j位置的不同走法,为上边的加上左边
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
代码解答
class Solution {
public int uniquePaths(int m, int n) {
int[][] dp = new int[m][n];
for(int i = 0;i<m;i++){
dp[i][0] = 1;
}
for(int j = 0;j<n;j++){
dp[0][j] = 1;
}
for(int i = 1;i<m;i++){
for(int j = 1;j<n;j++){
//到i,j位置的不同走法,为上边的加上左边
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
return dp[m-1][n-1];
}
}
不同路径Ⅱ

这道题就是在不同路径Ⅰ的基础上多了障碍物,当遇到障碍物时就表示这个位置不能走了。
与Ⅰ的做题方法一样,我们依然将最外层的全部初始化为1,当然当在外层遇到障碍物时就不需要继续往后遍历了,将障碍物后的全部置为0,因为有了障碍物的阻挡,没有办法走过去。
//将第一行和第一列初始为1 若碰到障碍就不遍历
for(int i = 0;i<m && obstacleGrid[i][0] == 0;i++){
dp[i][0] = 1;
}
for(int j = 0;j<n && obstacleGrid[0][j] == 0;j++){
dp[0][j] = 1;
}
这道题还需要考虑一下特殊情况,当障碍物刚好在起点,或者刚好在终点时这时候无论怎么走都不会到终点,因此直接返回0。
//先判断临界情况
if(obstacleGrid[0][0] == 1 || obstacleGrid[m-1][n-1] == 1){
return 0;
}
dp方程和上题依然一样,遍历的顺序也是一样的从左到右,从上到下,当我们遇到障碍物时就将该位置置为0。
for(int i = 1;i<m;i++){
for(int j = 1;j<n;j++){
dp[i][j] = (obstacleGrid[i][j] == 0) ? dp[i-1][j] + dp[i][j-1] : 0;
}
}
代码解答
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m = obstacleGrid.length;
int n = obstacleGrid[0].length;
//先判断临界情况
if(obstacleGrid[0][0] == 1 || obstacleGrid[m-1][n-1] == 1){
return 0;
}
//定义dp数组
int[][] dp = new int[m][n];
//将第一行和第一列初始为1 若碰到障碍就不遍历
for(int i = 0;i<m && obstacleGrid[i][0] == 0;i++){
dp[i][0] = 1;
}
for(int j = 0;j<n && obstacleGrid[0][j] == 0;j++){
dp[0][j] = 1;
}
for(int i = 1;i<m;i++){
for(int j = 1;j<n;j++){
dp[i][j] = (obstacleGrid[i][j] == 0) ? dp[i-1][j] + dp[i][j-1] : 0;
}
}
return dp[m-1][n-1];
}
}
















 63
63











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











