






相信大家在学习单片机的时候,最重要的一步就是编译与下载。但是有时候在使用ST-Link的时候,会发现使用Keil编译和下载代码的速度实在是太慢了,浪费大量时间与精力。下面我来和大家分享一下,如何简单的提高速率。
一、提高编译速度。
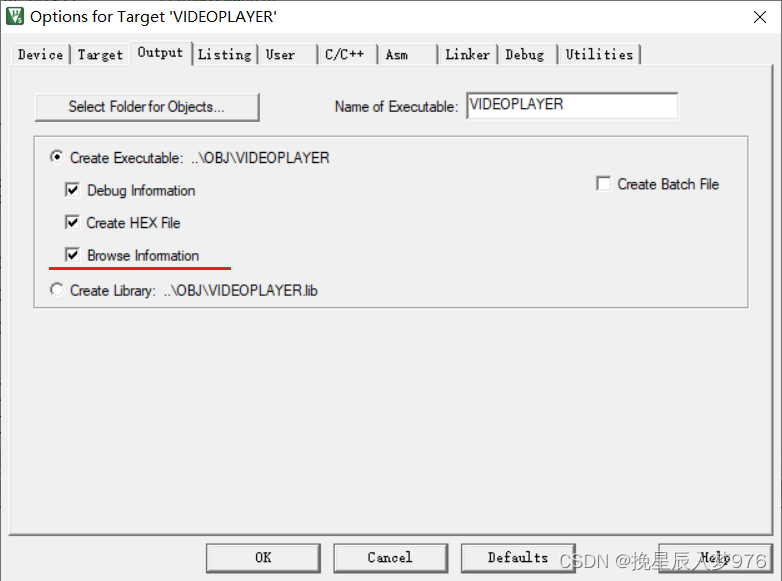
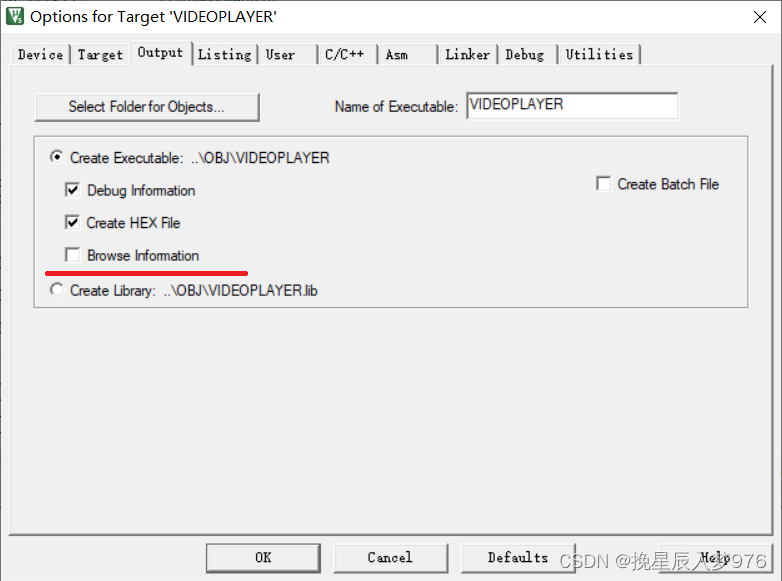
我们打开魔术棒的界面,调到output,我们可以看到browse information这个按钮。
Keil的输出中的浏览信息(browse information)是指编译器生成的用于代码导航和查找的附加信息。浏览信息通常包括源代码中的符号、函数、变量等的定义和引用关系。通过浏览信息,开发人员可以更方便地浏览和理解代码结构,进行代码导航、定位和跳转。
我们将它关闭不会影响程序的后续下载与编译,但有唯一的弊端是不能使用函数跳转功能了,如果你在编程过程中经常需要用函数跳转功能功能。请再勾选出来。
二、提高下载速度
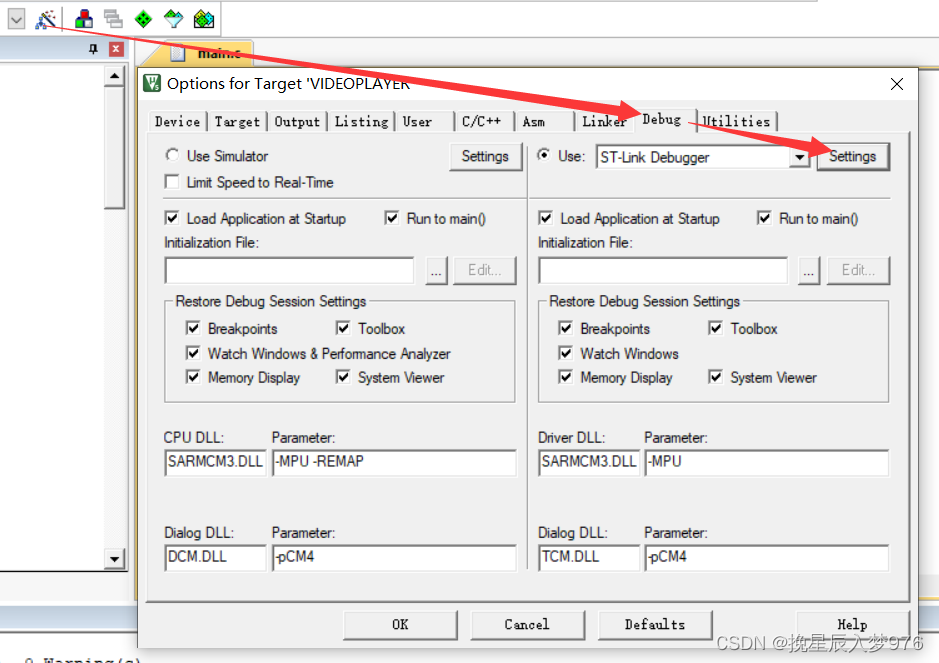
既然是对关于下载的调整设计,所以我们绝对是在Debug中进行设置。依然是打开魔术棒,找到Debug按钮。
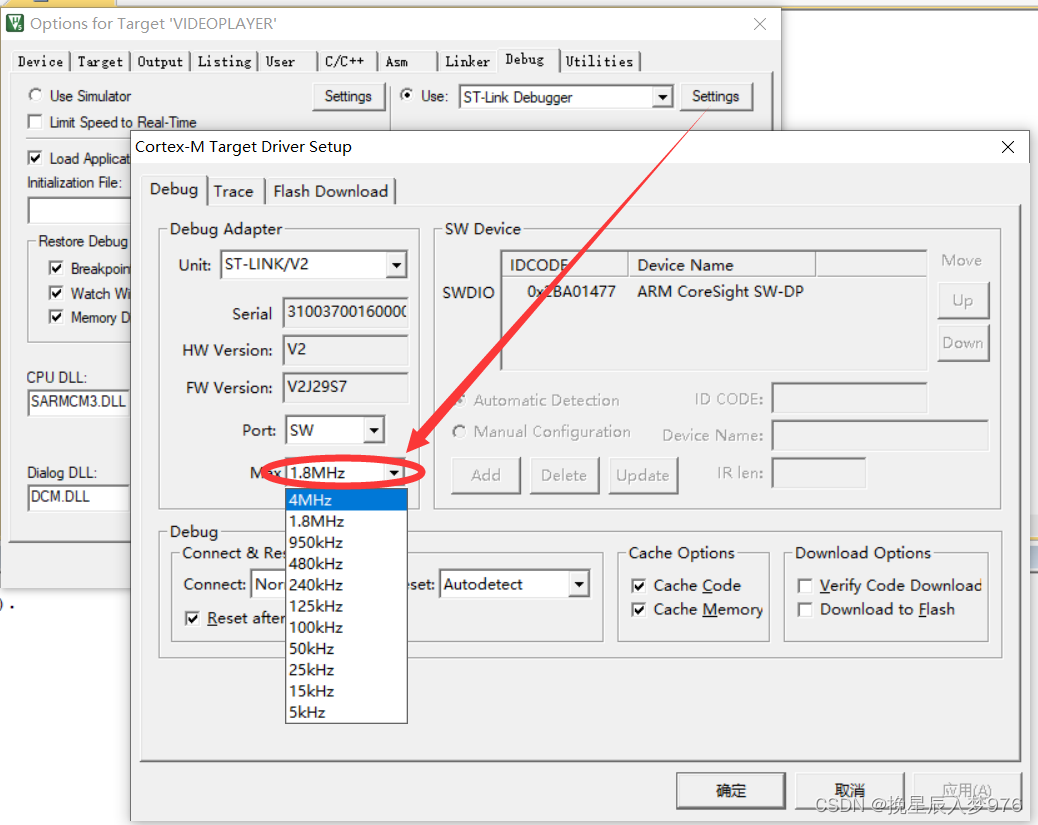
将此处的Max调到最大即可。你的下载速度被拉低,很有可能是这里给值的太小了。
感谢大家的观看,如果对您有帮助别忘了点赞,Thanks♪(・ω・)ノ。















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









